基于相对波动的自适应信号融合算法
2021-08-03潘作舟张光雅樊凤杰
潘作舟,孟 宗,张光雅,石 颖, 樊凤杰
(燕山大学 河北省测试计量技术及仪器重点实验室,河北 秦皇岛 066004)
1 引 言
多传感器融合技术可以被宽泛地定义为,将众多传感器采集到的信号进行融合,得到比其中任意单一传感器所采信号更接近真值的技术[1]。目前已经提出了很多信号融合的方法,如卡尔曼滤波(Kalman filter)[2~4]、模糊阈值理论[5,6]和随机加权算法[7,8]等。其中卡尔曼滤波和模糊阈值理论在实现最优融合方面存在着各自的局限性[9],这种限制包括:过度依赖于条件概率分布或模糊隶属函数,当观测值彼此高度冲突时的融合结果较差,由于过多使用状态变量导致的低实时性以及低效率等[10,11]。
随机加权是统计领域新兴的一种计算方法,现已被用来解决各个领域的各类复杂问题[12,13]。与现有的数据融合方法相比,随机加权算法具备计算简单、不需要信号的任何先验知识等优势[14];但该算法主要针对的是目标信号为常量的情况[15],它以所得测量值的均值作为当前时刻真值的最佳估计值,所得重构信号的总均方误差可以控制在极小的范围内。在目标信号为变量的情况下,为适应信号的变化,随机加权算法只能以当前时刻的测量值作为当前时刻真值的最佳估计值,此时重构信号的总均方误差较大。针对这一情况,本文提出了一种改进的自适应随机加权融合算法。该算法用自适应均衡因子调整当前时刻测量值和以往时刻测量值间的比例关系,减小目标信号为变量时的总均方误差。其中均衡因子的大小由信号的相对波动值决定,而相对波动值会根据信号的当前测量值的变化情况自适应地进行变化,因此该算法能够延续随机加权融合算法结构简单、无需信号先验信息等优点。
2 基于随机加权理论的融合算法
2.1 多传感器数据融合理论


图1 多传感器数据自适应加权融合估计模型Fig.1 Multi-sensor data adaptive weighted fusion estimation model
2.2 随机加权融合理论

(1)
(2)
总均方误差为
(3)
因为X1,X2,…,Xn彼此独立,并且为X的无偏估计,所以E[(X-Xp)(X-Xq)]=0(p=1,2,…,n;q=1,2,…,n;p≠q),故σ2可写成
(4)
从式(4)可以看出,总均方误差σ2是关于各加权因子的多元二次函数,因此σ2必然存在最小值。根据多元函数求极值理论,可求出总均方误差最小时所对应的加权因子为:
(5)
此时所对应的最小均方误差为
(6)
(7)
式中k为当前采集信号点数量。此时的真值估计值为
(8)
总均方误差为

(9)
3 改进的自适应随机加权算法

(10)
式中α为自适应均衡因子。
相对式(1)来看,利用式(10)来求取最佳估计值,可以充分考虑k时刻信号的变化情况以及k时刻信号与k时刻之前信号的相关性,从而进一步减小传感器的系统误差和测量时产生的随机误差,此时的真值估计值为
(11)
总均方误差为

(12)

(13)
通过迭代得到总均方误差的展开式为

(14)
为了方便求和,在式(14)的最后1项(X-Xp(1))2前乘上一个α2(当k值较大的时候对结果的影响可以忽略)。再根据等比数列的求和公式对式(14)进行近似求和,可得
(15)
对比改进前后的总均方误差,用式(15)减去式(4)得
(16)

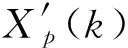
均方误差(mean square error,MSE)随α的变化情况如图2所示。因此,为了得到更好的融合效果,需要综合考虑当前时刻测量值和以往时刻测量值之间的关系。
图2 多路加噪轴承信号融合时MSE值随α的变化情况Fig.2 Variation in MSE value with α in multichannel noise-carrying bearing signal fusion
(17)
根据信号波动值随测量值自适应变化的特点,得到自适应均衡因子α,由式(18)给出。
(18)
式中:γ是相对波动值的阈值;γp(k)是信号在第k个信号点处的相对波动值,它是由第k个信号点处的信号波动值Yp(k)和第(k-1)个信号点处的波动值Yp(k-1)做差值后得到,由式(19)给出。
γp(k)=(Yp(k)-Yp(k-1))
(19)
相对波动值γp是以信号相对变化程度为依据所得到的变量,它能够根据当前采集到的信号来自适应地调整大小,这和第2.2节中提到的随机加权算法的自适应理论相互匹配。
值得注意的是,γ必须小于1。如果第k点处的相对波动值γp(k)超过1后,仍用其作为第k点的自适应均衡因子,将会放大当前信号值进而干扰信号的正常获取,因此相对波动值γp不能大于1。除此之外,当信号波动值小于1时,重建信号的相对误差可以被抑制。
关于自适应均衡因子不能大于1的证明过程:

(20)
将式(20)中的总均方误差与式(4)中的总均方误差做差值:
(21)
可以得到
σ′12>σ2
(22)
因此若相对波动值γp(k)大于1,则优化后的总均方误差σ′12会大于未优化前的总均方误差σ2。
4 实验与结果分析
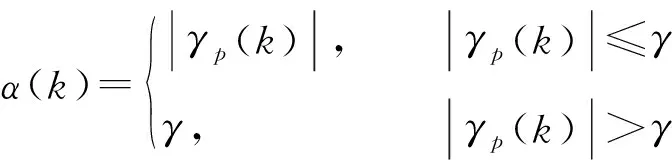
本试验所使用的实验平台如图3所示。使用的轴承为:3/4英寸(1.905 cm)转子轴承(ER-12K),实验中电动机的转速为1 200 r/min,转轴基频f=20 Hz,采样频率fs=12 800 Hz。从采集到的正常轴承信号中截取长度为N=1 024的1段,加入噪声,所加入的高斯白噪声的方差分别为0.002 5, 0.005 0, 0.007 5, 0.01, 0.012 5, 0.015 0, 0.017 5, 0.02, 0.022 5, 0.025。
图3 信号采集平台Fig.3 Signal acquisition platform
在本文中,阈值γ设置为0.9,即当信号相对波动值γp(k)超过0.9时,将γp(k)设置为0.9。为更好地分析自适应均衡因子α的性能,将其与最优均衡因子αb进行对比分析,其中最优均衡因子为以最佳估计值与真实值之间的偏差最小为目标函数而得到,可以被视作均衡因子的最优解,如式(23)所示。

(23)
4.1 实验1
根据上述的实验条件和计算方法,可以计算得到信号的最佳均衡因子αb、自适应均衡因子α,以及二者的偏差值D(D(k)=|α(k)-αb(k)|),如图4所示。
图4(a)、图4(b)中给出了对应于含噪(方差为0.025的高斯白噪声)轴承信号的自适应均衡因子α和最佳均衡因子αb,可以看出2种均衡因子的图像具有较高的相似性。从图4(c)中可以看出,在大多数情况下,2者的偏差值D可以很好的控制在[0,0.1]的范围内;当最优均衡因子αb在某些位置出现较大波动时,自适应均衡因子也可以进行良好的匹配,以实现最佳重建效果。
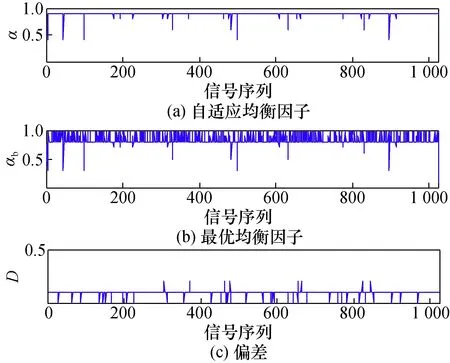
图4 最优均衡因子与自适应均衡因子的比较Fig.4 Comparison of the optimal and adaptive equalization factors
为了定量说明利用自适应均衡因子α求解最佳估计值可以起到抑制重构信号总均方误差的作用,分别计算利用测量值作为最佳估计值、利用自适应均衡因子α求解最佳估计值、利用最优均衡因子αb求解最佳估计值时重构信号的MSE值,如表1所示。表1中的均方误差(MSE)为500次重复试验后的平均值。
从表1可以看出,利用自适应均衡因子α求解最佳估计值时重构信号的MSE值小于直接利用测量值作为最佳估计值时重构信号的MSE值,并且非常接近利用最优均衡因子αb求解最佳估计值时重构信号的MSE值。因此利用自适应均衡因子α来求解信号的最佳估计值可以减小重构信号中的总均方误差。

表1 对比不同处理后所得重构信号的MSE值Tab.1 Compare the MSE values of the reconstructed signals obtained after different treatments ×10-3
4.2 实验2
为了直观展示所提算法的有效性,在进行多组信号融合实验之前,首先进行单组信号的去噪实验。待处理的信号为含噪阶跃信号、含噪轴承信号,所加噪声为高斯白噪声(方差为0.025)。去噪方法包括:自适应均衡因子算法、卡尔曼滤波算法。2种算法的运算复杂度通过运行时间进行衡量,其MSE值和计算时间t见表2。
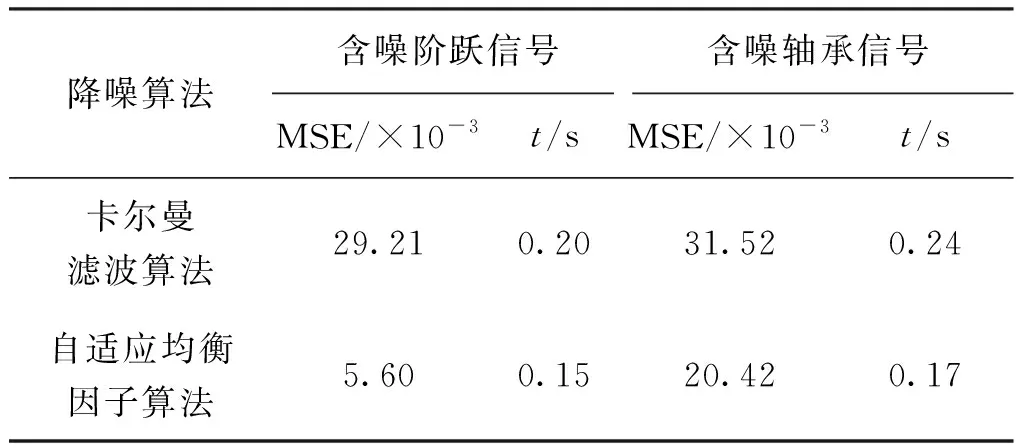
表2 2种算法MSE值和计算时间的比较Tab.2 Comparison of the MSE value and computation time between two algorithms
图5给出了2种算法的去噪效果,可以看出:2类含噪信号在经卡尔曼滤波算法处理后,其中的噪声成分得到了一定程度的抑制,且处理后的信号会更加光滑,但在信号的开始和结束阶段存在明显的失真现象;2类含噪信号在经自适应均衡因子算法处理后,信号中的噪声成分得到了明显的抑制,更接近于真实信号,且不存在端点失真的情况。

图5 2种算法去噪效果的比较Fig.5 Comparison of de-noising effect between two algorithms
根据表2中的数据结果可发现:经卡尔曼滤波算法处理后的信号的MSE值分别为0.029 21、0.031 52,经自适应均衡因子算法处理后的信号的MSE值分别为0.005 60、0.020 42;卡尔曼滤波算法处理2类含噪信号所需要的运行时间分别为0.20 s、0.24 s,自适应均衡因子算法处理2类含噪信号所需要的运行时间分别为0.15 s、0.17 s。可以得出结论:自适应均衡因子算法相较于卡尔曼滤波算法,其重构信号的总均方误差更小、运行速度更快。
4.3 实验3
在上述实验的基础上,对10组含噪信号进行融合去噪。融合算法包括基于卡尔曼滤波的融合算法、随机加权融合算法和改进的自适应随机加权融合算法。其中,基于卡尔曼滤波的融合算法遵循最小均方误差准则。待处理信号分别为含噪阶跃信号和含噪轴承信号。添加的高斯白噪声的方差分别为0.002 5, 0.005 0, 0.007 5, 0.01, 0.012 5, 0.015 0, 0.017 5, 0.02,0.022 5, 0.025。
3种算法的去噪结果见图6,可以看出,经基于卡尔曼滤波的融合算法处理后的2类信号仍存在明显的端点失真情况,导致融合信号的总均方误差较大。经传统的随机加权算法处理后的2类信号中的噪声成分得到了一定程度的抑制,但改进的自适应随机加权算法的去噪效果更加优秀。根据上述实验结果,可以看出,当目标信号是变量时,本文提出的改进的自适应随机加权算法具有一定的优势。
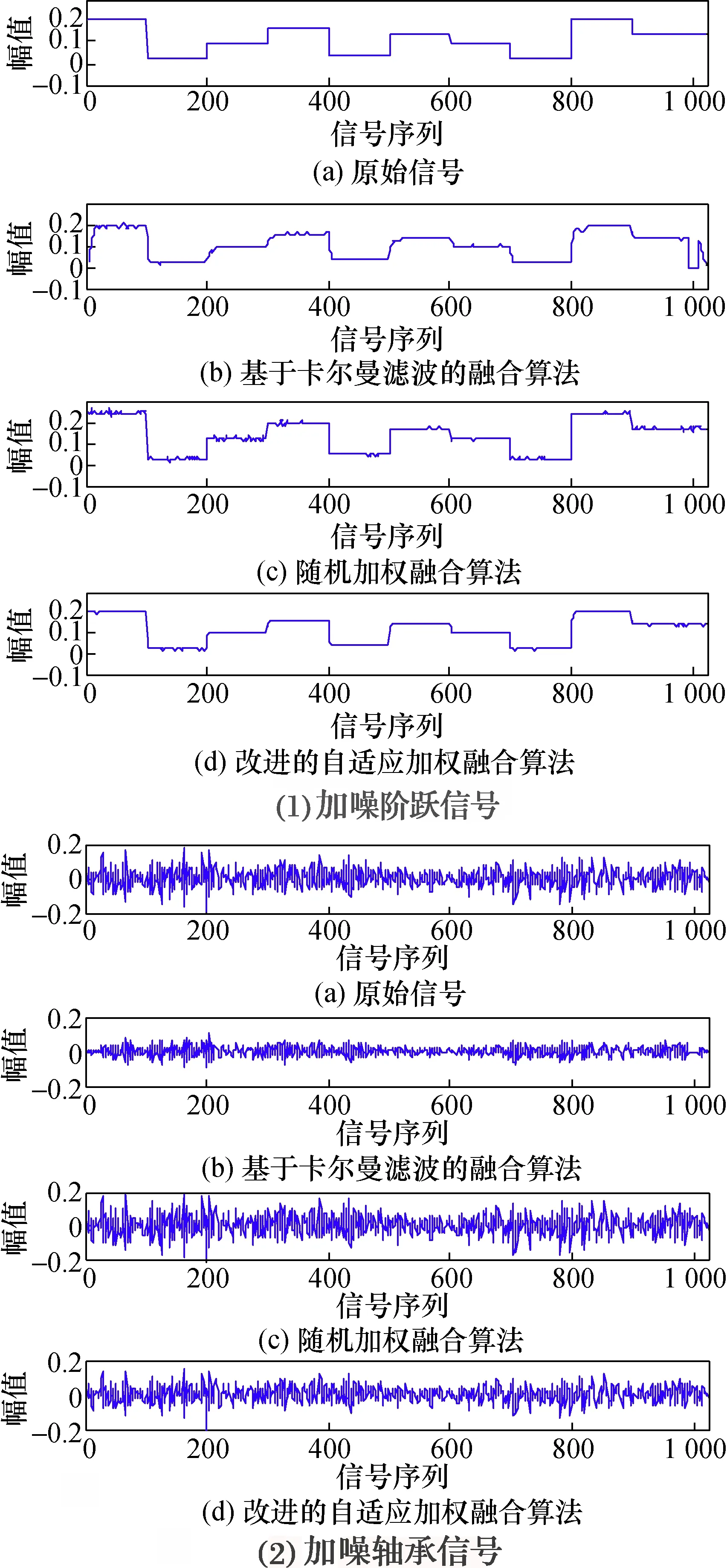
图6 3种算法去噪效果的比较(噪声方差为0.025)Fig.6 Comparison of de-noising effect between three algorithms(noise variance is 0.025)
为定量分析3种融合算法的性能优劣,表3给出了3种融合算法的运行时间t以及融合后信号的MSE值。其中,改进的自适应随机加权算法作为一种简单、高效的融合算法,经其处理后所得信号的MSE值要低于其他2种融合算法, 并且计算复杂度也要低于其他两种融合算法。对比运算时间,可以看出,改进的自适应随机加权算法的运算时间仅为基于卡尔曼滤波的融合算法运算时间的1/3。因此利用本文所提算法对多传感器信号进行融合时,可以获得更低的相对误差和运算复杂度。
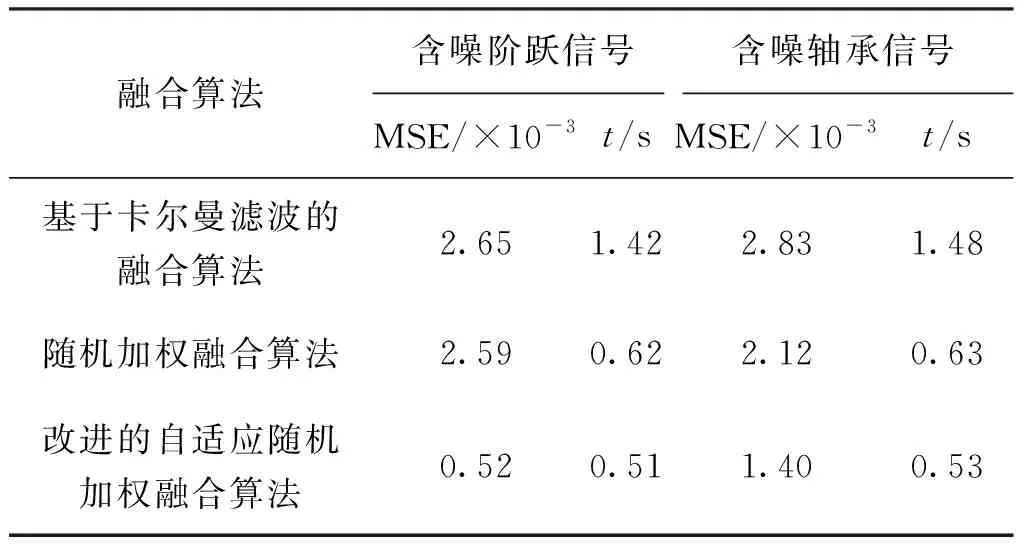
表3 3种算法MSE值和计算时间t的比较Tab.3 Comparison of the MSE value and computation time of the three algorithms
5 结 论
本文提出了1种改进的自适应随机加权算法,用于目标信号为变量时的信号融合过程。该算法在估计真值的过程中,引入1个均衡因子来调整当前测量值与历史测量值的比例关系,其中均衡因子的大小根据所采信号的相对波动值可以自适应地变化。新算法不仅可以得到更加接近真值的估计值,而且可以与传统随机算法进行良好结合。实验结果表明,自适应均衡因子同最优均衡因子间的偏差较小;同传统随机加权算法相比,经改进算法融合所得信号的总均方误差更小、运行速度更快。
