无传感器直接转矩控制在空调风机控制中的应用研究
2021-06-22杨辉
杨 辉
(四川野马汽车股份有限公司,成都 610100)
0 引 言
在经典的永磁同步电动机控制系统中,电机的转子位置往往通过旋转变压器、光电编码器或磁编码器获得。使用物理传感器,致使控制系统成本上升,影响系统的稳定性和可靠性,并使得物理设备的尺寸无法进一步缩小,物理传感器在一些行业是无法应用的。因此,无传感器控制技术已成为一个重要的发展方向。
基于成本和可靠性的限制,家电行业大多采用无位置传感器控制技术。传统的空调室内风机控制采用的是无传感器矢量控制技术,由于位置估计算法依赖于电机参数,而电机参数又会随工况发生变化,所以位置估计精度是很难保证的。直接转矩控制作为一种有别于矢量控制的控制策略,具有对电机参数依赖性小、控制简单、转矩响应快和动态性能好的优点,显然,空调风机的控制更适合采用直接转矩控制。另外,传统的风机起动过程包括定位、开环和闭环三个部分,耗时较长;而直接转矩控制无需定位,缩短了起动时间,更能满足用户对舒适性的需求。因此,无传感器直接转矩控制方法更适用于空调室内风机的控制。
以往关于无传感器直接转矩控制的研究多集中在仿真与实验阶段,对工程应用而言都存在着一定的缺陷。例如,文献[1]采用了坐标变换,这就失去了直接转矩控制不需解耦的优势;文献[2]采用的方法对电机参数摄动、外部干扰、测量噪声和过程噪声都具有较强的鲁棒性,但是涉及到复杂的矩阵计算,且矩阵中含有角度参数,很难满足工程实时性要求;文献[3]采用了基于瞬时功角检测的速度估计方案和滑模变结构直接转矩控制策略,取得了良好的控制效果,但对硬件要求太高,不易实现产品化。在多数工程应用中,特别是家电行业,出于成本的压力,芯片的资源往往是极其有限的,许多复杂的算法通常是无法应用的。针对上述不足,本文给出了一种易于工程实现的无传感器直接转矩控制方法。
1 基本原理
1.1 直接转矩控制的基本原理
永磁同步电动机直接转矩控制(以下简称DTC)的基本原理[4]是,在转子磁链不变的条件下,维持定子磁链幅值为一定值,通过控制定子磁链旋转速度实时调节转矩角,以控制电机转矩追随给定转矩,从而达到调速的目的。
反电动势积分方程:
(1)
式中:uα,uβ为α,β轴输入电压;Iα,Iβ为α,β轴测量电流;R为电机相电阻;ψα,ψβ为α,β轴定子磁链。
定子磁链幅值方程:
(2)
定子磁链相位角方程:
(3)
转矩观测器方程:
Test=1.5p(ψαIβ-ψβIα)
(4)
式中:p表示极对数。
DTC应用滞环比较器控制转矩误差,在一个控制周期内,只有8个基本的空间矢量可选,因此矢量切换是步进式的,这造成了转矩和磁链的脉动。文献[5]给出了一种应用矢量控制代替开关表的控制方法。
由文献[5]可得到下面的公式:
(5)

(6)
式中:T为采样时间;uα,uβ为α,β轴电压。角位置可由该电压求取:
(7)
1.2 改进型积分器
DTC中定子磁链计算一般采用式(1)的反电动势积分算法,该方法的纯积分器存在积分初值问题,即直流分量导致的积分累积饱和问题。因此,Jun Hu等[6]提出了三种改进型积分器,这三种改进型积分器有效提升了定子磁链观测的精度,也延续了积分器的简单结构。下面我们给出第三种改进型积分器,如图1所示。
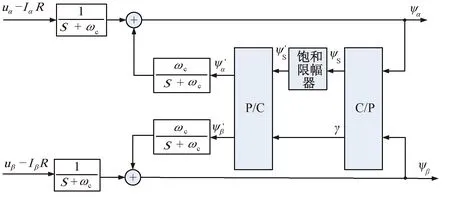
图1 改进型积分器
图1中,C/P为直角坐标系到极坐标系转换,P/C是极坐标系到直角坐标系的转换。该结构中饱和限幅器对磁链幅值进行限制,而对ψs相位没有影响。通过直角坐标系到极坐标系之间两次变换使得磁链相位不变,即磁链补偿信号相位等于磁链矢量ψs相位。
ψs和γ可根据式(2)、式(3)求取,ψ′s由下式求取:
(8)
ψ′α,ψ′β根据下式求取:
(9)
在工程应用中,正余弦的求取是相对耗时的,可以转换成下式求取:
(10)
2 工程应用中应该考虑的问题
在无传感器DTC系统中,转矩、转角最终都是通过测量电流和给定电压估算的,而在低速和设备刚刚起动时,这两个量是不稳定的。因此,对于无传感器控制方式而言,在设备低速或者起动阶段实现速度闭环是十分困难的,一般都采取先开环后闭环的控制方式。如前所述,在家电行业基于成本压力,使用较高级的硬件平台可能性较小,为了满足实时性要求,控制算法应尽量简化。另外,为了保证设备运行的可靠性,需要对切换过程做适当的平滑处理,并对输出电压做恰当的限制。鲁棒性是另一个重要的工程指标,当导致设备起动或运行失败的外部扰动消失时,设备应该能够立即自行恢复。
2.1 开环控制与闭环控制
开环控制采用给定恒定负载角增量δ的控制方式,为了使设备开环起动可靠,将式(6)简化如下:
(11)
这样就能保证uα,uβ的正交特性,确保开环起动的稳定性。
角度按恒定速度给定,见下式:
γn=γn-1+ωrefT
(12)
式中:γn,γn-1分别为n和n-1时刻的定子磁链角;ωref为给定的恒定速度;T为采样时间。应该注意,在起动时,给定速度需要从0逐渐增加到ωref,否则容易导致起动失败。
当由开环控制切换到闭环控制时,应该保证负载角增量δ和α,β轴输出电压的平滑过渡,否则容易导致切换失败。负载角增量δ可采用简单的线性过渡,α,β轴输出电压的平滑过渡见下式:
u′α(n)=uα(n)u′s(n)/us(n)
u′β(n)=uβ(n)u′s(n)/us(n)
式中:uα(n),uβ(n)为n时刻α,β轴计算的输出电压;uα(n-1),uβ(n-1)为n-1时刻的α,β轴计算的输出电压;us(n)为n时刻的计算电压的合成电压;u′s(n)为n时刻实际输出电压的合成电压;u′α(n),u′β(n)为n时刻实际的输出电压;σ为合成电压增量门限。经过上述处理,即使α,β轴计算的输出电压有较大变化,实际的α,β轴输出电压变化也是平滑的。
2.2 锁相环
在工程应用中,通常采取速度、转矩双闭环控制系统,如图2所示。

图2 无传感器直接转矩控制系统框图
图2中,ASR为速度调节器,PI为转矩环的PI调节器。
观测速度需要利用锁相环求取,简单的角度微分求取速度会含有大量微分噪声,不能直接应用于工程中。锁相环框图如图3所示。

图3 锁相环
需要注意的是,尽管锁相环求取的速度在质量上远好于直接微分求取的速度,但仍需增加低通滤波环节后才能使用,否则容易导致速度闭环失败。
2.3 鲁棒性
鲁棒性是工程化应用的另一个主要考核指标。在设备起动或运行过程中,可能突遇扰动导致起动或运行失败,当外部扰动消失时,设备应该能够快速自行恢复。本文采用开闭环可逆切换的方式来提高系统鲁棒性。具体过程描述如下:
当设备在起动或运行过程中,如遇到外部干扰导致设备无法正常运行时,设备将保持在开环运行状态,以恒定转速旋转定子磁链。干扰一旦消失,定子磁链就会带动转子开环旋转,直至进入闭环正常运行。
显然,外部干扰加入与消失的判断准则是系统开闭环可逆切换控制的关键。下面给出具体的判断准则:
开环运行时,若ω(n)>ε1且ω(n)-ω(n-1)<ε2,t>τ1,则进入闭环;闭环运行时,若ω(n)<ε1或ω(n)-ω(n-1)>ε2,t>τ2,则进入开环。
上述描述中,ω(n),ω(n-1)为n和n-1时刻的估算速度;ε1为速度判断门限;ε2为速度变化率判断门限;t为连续满足速度和速度变化率判断条件的时间间隔;τ1,τ2为时间间隔的门限,一般τ2<τ1。
3 实 验
下面将无传感器DTC方法应用于某型号空调室内风机上,并与原无传感器矢量控制方案进行比较。设定目标转速为300 r/min。
应用PT710霍尔电流钳获取U相相电流,应用横河示波器DLM2054记录数据,设置每秒记录数据1 250个,并设置通道滤波带宽为8 kHz。图4~图7的波形均为U相相电流波形,图中横坐标为记录点数,纵坐标单位为mV,且每1 mV对应0.1 A电流。

图4 传统的风机起动方式
3.1 起动过程的比较
对比图4和图5,不难看出,起动时间由原来的7 s缩短为2 s,这使得用户可以更快地感受到空调的送风,从而提升产品的舒适度。图5中,由于采用恒负载角增量δ控制,根据式(5)和式(11),α,β轴电压uα,uβ幅值为常量,因此随着转速即反电动势的增加,相电流会随之减小。

图5 DTC的起动方式
3.2 运行过程突遇堵转的比较
对比图6和图7可见,传统的控制方式,在突遇堵转时会立即停机,然后二次起动;而本文给出的控制方法,在突遇堵转时仍然以开环运行,一旦堵转转矩消失,会立即加速至闭环,大大提升了设备的抗扰能力。

图6 传统控制方式遇到突加堵转的响应

图7 DTC遇到突加堵转的响应
4 结 语
与传统无传感器DTC相比,本文的方案算法更为简单,并且为了确保工程化应用的可靠性,给出了开闭环切换的过渡方法。
为了满足工程化抗扰性要求,本文提出了开闭环可逆切换的控制方法。
与传统的空调室内风机控制方案进行了对比,实验结果表明,本文的方法加快了设备的起动速度,且有更优越的鲁棒性。
