基于应变响应功率谱传递比的海上风机工作模态识别
2021-06-22陈志为刘奎铭陈华书荣维栋
陈志为,刘奎铭,陈华书,荣维栋,刘 俊
(1.厦门大学建筑与土木工程学院,福建 厦门 361005;2.远景能源有限公司,上海 200051)
结构工作模态参数可表征结构在运行工况下与其工作状态相匹配的动态特性,是判断结构运行安全的重要指标[1].对于配有旋转设备的海上风机结构,其结构工作模态与固有模态间存在一定差别[2].风机结构在较高转速运行时明显受到了叶轮转频及倍频谐波激励作用,导致结构振动中的谐波成分往往占据响应中大部分能量.另外,工作模态频率与转频谐波成分通常较接近,结构受持续环境荷载激励时产生的模态信息会淹没于谐波信号中,极大地影响工作模态识别的精度.准确识别结构工作模态有助于分析激振力与结构共振现象,排除结构运行的安全隐患,具有重要的研究价值.
识别高转速运行下海上风机的工作模态,主要难点在于识别并剔除与结构固有频率相近的谐波成分造成的虚假模态.在已开展的相关研究中,有学者提出通过信号预处理(如信号滤波[3-4]或统计特征分析[5-6])改善谐波干扰问题.但这类方法需额外完成信号分解与重构,费时且存在剔除有效信息的风险.另一类做法是引入新的算法并改进模态参数提取过程[7-9].近些年提出的功率谱密度传递比(power spectrum density transmissibility,PSDT)算法[10]将系统输入作为动力源但不参与运算,避免处理复杂信号,还可极大降低谐波干扰对模态参数识别的影响[11].Yan等[12]结合PSDT与最小二乘复指数法(least squares complex exponent method,LSCE)提出了新的模态识别方法,并验证了方法的良好抗噪性.考虑到应变传感器成本低,易安装,且应变模态[13-14]具有比位移模态更高的损伤灵敏度,曹林波等[15]进一步推导了应变响应功率谱传递比(strain response PSDT,SPSDT),并将其用于应变模态参数分析.目前该方法还未被应用于实际工程结构,尤其是具有明显谐波干扰特征的海上风机设备.
因此,本文提出了基于SPSDT的海上风机工作模态参数识别方法,介绍了SPSDT的基本理论及模态参数识别方法.以某海上风机为对象,首先基于停机工况下的加速度和动态应变响应数据依次识别模态参数,用于验证算法的可行性.随后考虑转频谐波干扰的影响,基于动应态变数据识别风机在不同运行工况的模态参数.
1 SPSDT驱动的模态参数识别方法
1.1 SPSDT驱动的拾峰法
受到Devriendt等[16]对于传递比工作的启发,Yan等[10]提出了PSDT的概念.对于一个多自由度的系统,通过引入参考点,可在频域内建立输入激励与输出响应功率谱密度(power spectrum density,PSD)之间的关系如下[12]:
GYY(s)=H(s)GUU(s)H*(s),
(1)
其中,GYY(s)∈CNo×No是响应的PSD矩阵,GUU(s)∈CNr×Nr是输入的PSD矩阵,No为输出点数,Nr为输入点数,H(s)∈CNo×Nr是频响函数(frequency response function,FRF)矩阵,而H*(s)表示对H(s)做复共轭和转置处理后得到的矩阵.
(2)
其中,Hik(s)表示输出yi与输入Uk(k=1,2,…,Nr)之间的FRF矩阵,GUkUn(s)是作用于自由度k和n(n=1,2,…,Nr)的力的PSD,φip和φjp是对应于自由度i和j的振型分量.
曹林波等[15]将PSDT函数推广至应变模态分析领域,推导了SPSDT如下:
(3)
不难发现在相同振动条件下两个具有不同传递比输出的SPSDT函数相减可满足[15]:

(4)
结构在随机振动响应下的系统极点即为SPSDT差值函数零值所对应的点,不同于随机响应,谐波信号响应的PSD函数曲线存在两个峰值[5],故在相同参考点处的SPSDT函数差值也不为零.利用该特性可有效区分结构工作模态与谐波干扰.
通过合并不同测点的SPSDT差值函数以降低误判系统极点的风险,可得到SPSDT有理函数ΔεT-1如下[15]:
(5)
通过联合不同参考点对应的SPSDT函数共同构成SPSDT矩阵,能够生成SPSDT有理函数峰值曲线,该峰值曲线将用于筛选系统极点.
1.2 SPSDT驱动的参数拟合法
通过SPSDT驱动的拾峰法能够检测出多重模态,但需要人工操作实现,是一种非参数化的方法,具有较强的主观性.LMS公司于2004年推出的多参考点最小二乘复频域指数(PolyMAX)算法在实验模态与运行模态分析领域均有较好的应用效果,适用于小阻尼、大阻尼以及密集模态系统的参数识别[17-18].故本文选择与PolyMAX结合实现SPSDT驱动的参数拟合新方法.
在频率域,系统输出o(o=1,2,…,No,其中No为输出点数)和系统输入可用PolyMAX算法的右矩阵分式模型(right matrix fractional model,RMFM)描述,可表示为[17]:
Ho(ω)=Uo(ω)Do(ω)-1.
(6)
其中:Ho(ω)∈C1×Nr为结构响应矩阵(如FRF矩阵和SPSDT矩阵)的第o行,Nr为输入点数;Uo(ω)∈C1×Nr为分子多项式行向量;Do(ω)∈CNr×Nr为分母多项式矩阵,且Uo(ω)和Do(ω)可以表示为[17]
(7)
其中,N为多项式阶次,多项式基函数Zr(ω)=e(-iωTs),Ts=2π/f,f为采样频率.其中分母系数矩阵Ar∈RNr×Nr和分子系数行向量Bor∈Rl×Nr是待估计参数.
对式(6)右乘Do(ω)进行线性化处理,利用最小二乘原理求解分母系数矩阵.通过缩减标准方程大幅缩小标准方程的维数,缩减后标准方程为[17]:
(8)
Xo=
CNf×Nr(N+1),
(9)
Yo=
CNf×Nr(N+1).
(10)
(11)
由式(11)可以得到每一阶次的模态参数.计算不同阶次下的系统极点,并将其绘于同一张图,即可形成系统极点的稳定图.代表真实模态的极点可在某个频率附近稳定地出现,逐渐形成一根清晰的轴线,可称之为“稳定轴”.基于该特性,通过稳定图的某一阶频率附近是否存在清晰的稳定轴,可判断对应模态的真实性.
2 应用案例:某海上风机工作模态参数识别
2.1 海上风机及其数据采集系统简介
以上海远景能源某海上样机为例,该风机轮毂高度约90 m,叶片长度约70 m,宽度从叶根到叶尖逐渐变小,额定转速约为12 r/min.海上风机结构如图1所示.
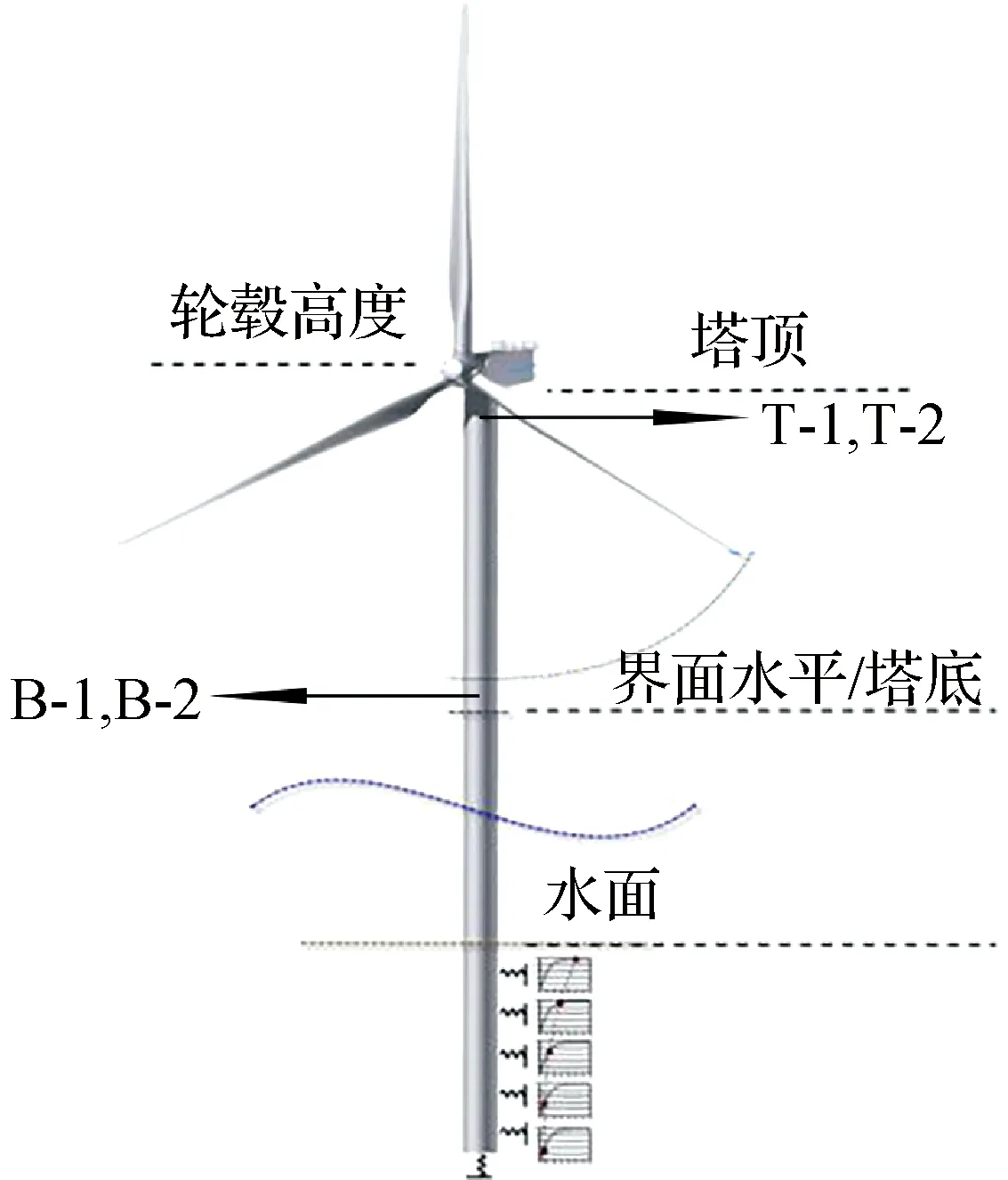
T-1,T-2表示塔顶处的应变计;B1,B2表示塔底处的应变计.图1 海上风机结构示意图Fig.1 Schematic diagram of an offshore wind turbine structure
该风机配有数据采集与监控(supervisory control and data acquisition,SCADA)系统.SCADA系统由微处理器和多个传感器组成,远程连接每台风机与主控机房,用于控制风机运行,监测风机性能.该系统以一定的采样频率采集风机运行数据,包括风速、风向、叶轮转速、叶轮方位角、发电机转速、叶片桨距角、发电功率、塔顶加速度、应变等.通过这些数据,控制系统可负责风机的运行操作,如启停机、紧急停机、机舱方位角和叶片桨距角的调整.如表1所示,不同运行状态可对应于风机不同的运行参数(风速、叶轮转速、叶片桨距角和机舱方位角等),进而形成风机运行的多个工况(含停机状态和多个工作状态).SCADA系统采集了不同工况下的加速度与应变数据,这些数据将用于验证前文提出的模态参数识别方法.
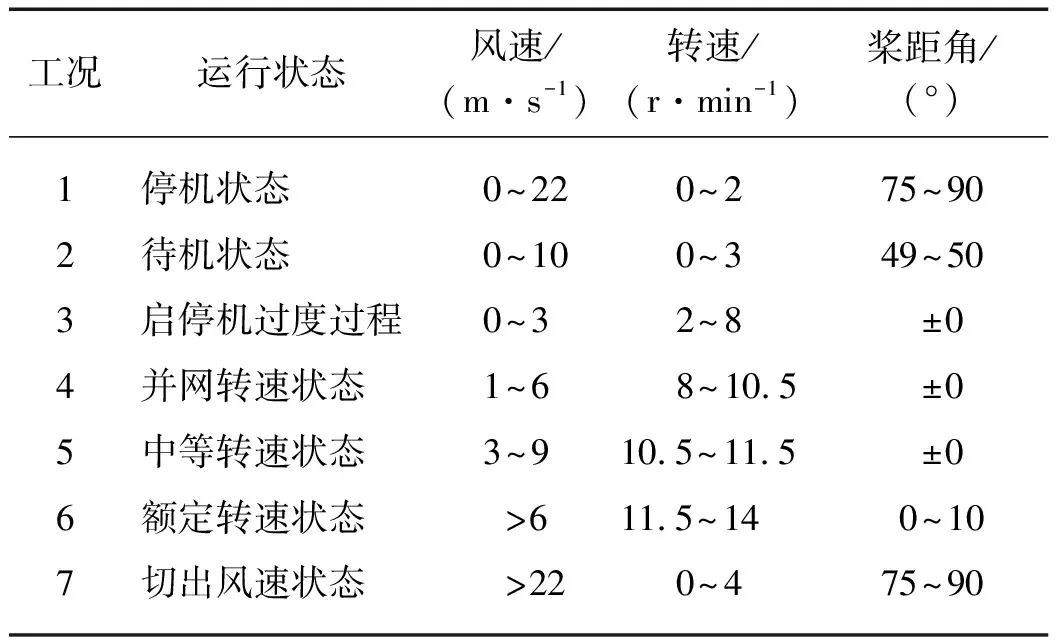
表1 风机运行工况定义Tab.1 Definitions of operating conditions of wind turbine
2.2 停机状态下风机模态参数识别
由于该海上风机只布置了2个加速度传感器,仅通过2个点的加速度响应和传递比函数难以稳定识别结构模态参数.除此之外,该风机还布有4个应变传感器,可以提供更丰富的结构响应信息.相比于加速度传感器,应变类传感器具有成本低、易安装的优点.因此,验证基于SPSDT识别风机模态参数的可行性具有重要意义.为此选择停机状态下(工况1)的监测数据,此时风机转速基本为零,叶片转频带来的谐波干扰可以忽略.停机状态下风机塔顶与塔底动应变时程如图2所示.其中T-1与T-2表示塔顶处的应变计,分别测试塔顶前后与左右方向的应变,而B-1与B-2则表示塔底位置的应变计,由图可知塔顶的应变响应幅值明显小于塔底.
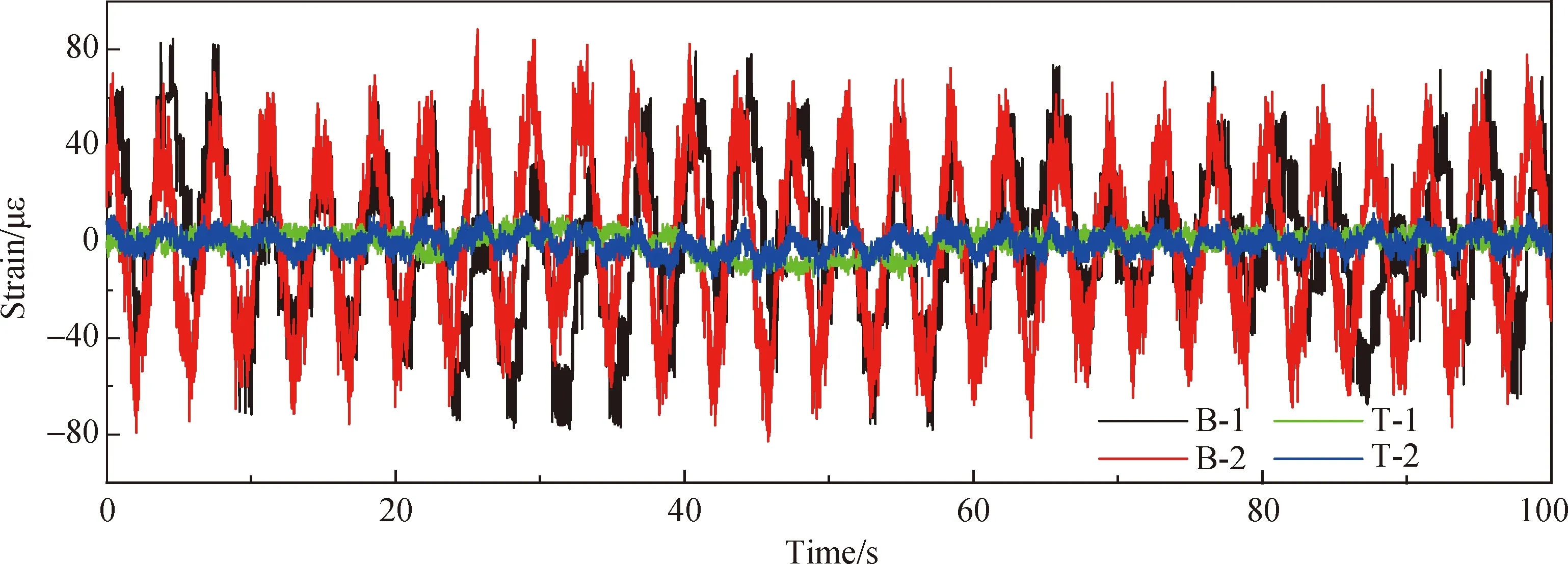
图2 停机状态下风机塔顶与塔底的动应变时程Fig.2 Dynamic strain time history measured at the top and bottom of wind turbine tower in shutdown state
为了便于对比,利用塔顶的加速度数据和应变数据分别构造加速度和应变响应的FRF矩阵,可形成峰值曲线对比(图3).从图3可以看出,无论基于加速度或应变响应数据,均可通过曲线峰值判断结构固有模态,并且两者识别的峰值位置很接近.由此可说明利用动应变数据识别风机结构模态参数具有可行性.
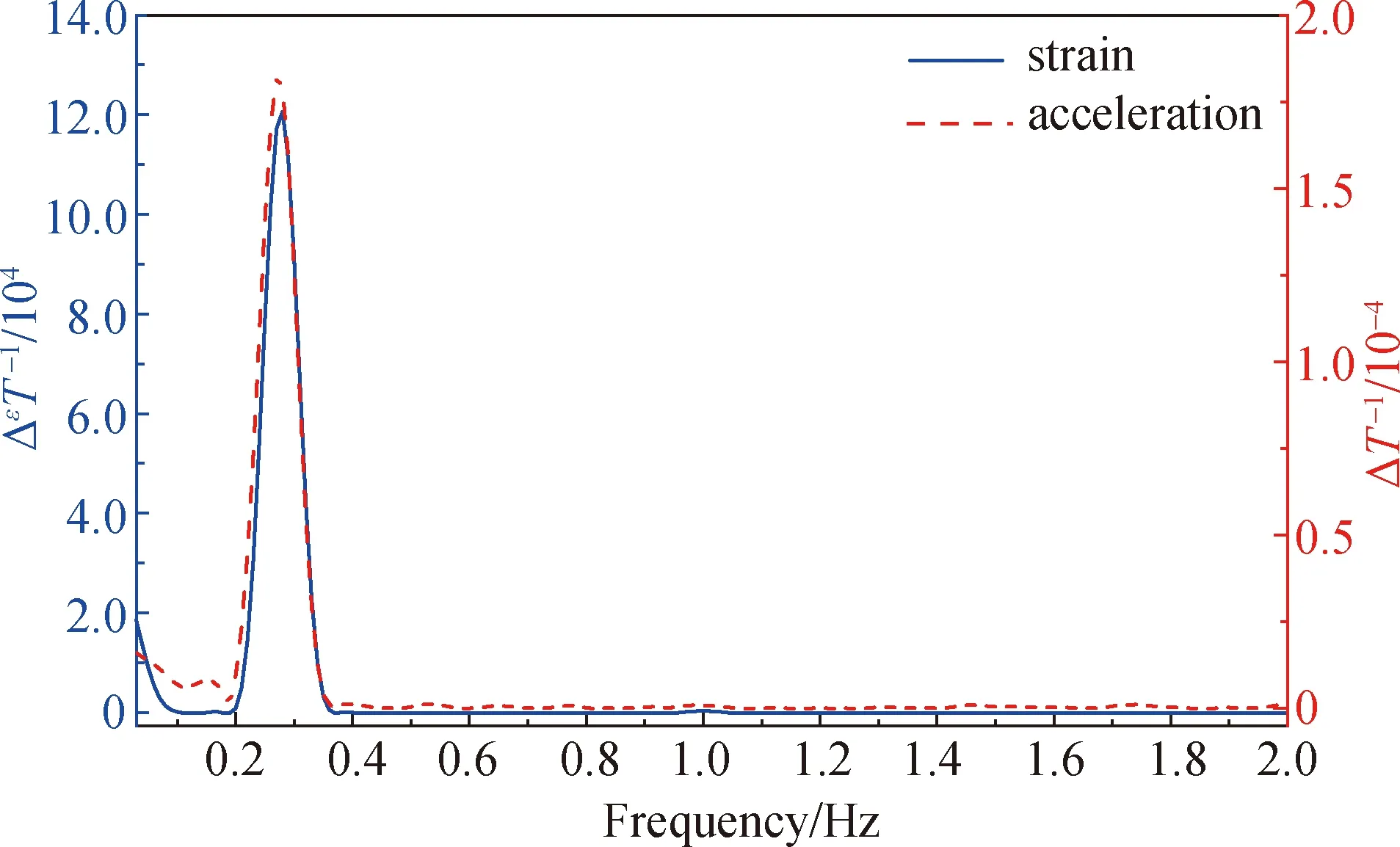
图3 基于加速度与动应变数据的FRF函数峰值曲线Fig.3 Peak curves of FRF functions based on acceleration data and dynamic strain data
2.3 工作状态下风机模态参数识别
为了进一步验证方法在风机不同工作状态下识别风机模态参数的可行性,应充分考虑风机运转产生的谐波干扰,故选择了稳定运行工况下(工况6)的数据用于验证.在该工况下,风机达到额定转速且外界环境风速达到额定风速,叶片旋转频率带来的谐波干扰达到最大.由于风机运转产生的转频谐波会随着转速增大而改变,并非恒定值,难以通过简单滤波准确地剔除该部分谐波干扰.
通过式(3)~(5)构建SPSDT矩阵,从而得到改进前后的峰值曲线对比(图4).在FRF矩阵生成的峰值图中,由于风机转速提升,叶片的旋转频率不断增大,最终占据风机响应中的绝大多数能量,且对结构基频产生影响,导致结构频率容易被过高的旋转频率(rotation frequency,RF)(0.21 Hz)及其倍频3RF(0.63 Hz)对应的峰值频率所掩盖,从而导致模态分析出现误判,加大了模态分析的困难.而SPSDT矩阵生成的峰值曲线在结构频率(structural frequency,SF)(0.30 Hz)处出现最大峰值,与停机工况下的基频0.28 Hz非常接近,这充分说明SPSDT函数能够基于随机信号与谐波信号的统计特性区分系统极点,从而降低谐波干扰的影响,使结构的固有模态响应信息在噪声干扰中脱颖而出.
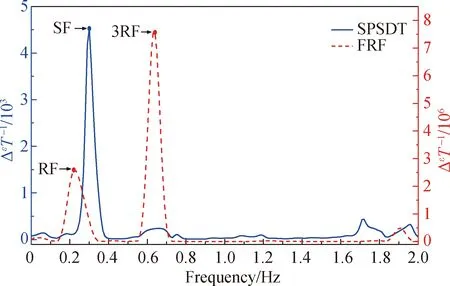
图4 风机额定转速工作状态下SPSDT与FRF函数峰值曲线Fig.4 Peak curve of SPSDT and FRF function under the rated speed condition of wind turbine
但由于SPSDT拾峰法是非参数的方法,无法计算结构阻尼比,且从图4可以看出,谐波干扰造成的峰值明显降低但仍未去除,所以需要通过参数拟合方法生成的稳定图进一步进行筛选.应用SPSDT驱动的PolyMAX方法进行识别,根据式(6)~(10)可计算得到结构模态参数,其中结构模态参数容许阈值取:频率阈值δf≤1%,阻尼比阈值δζ≤5%.通过比较模态信息的离散程度来提升稳定图的清晰度和可读性,如果两极点之间的频率、阻尼比的相对误差值低于结构容许阈值,那么将其标记为稳定极点,最终得到海上风机结构在工况6下生成的稳定图(图5(a)).可以明显看出,在谐波频率处的稳定点较为离散,难以形成稳定轴,而在结构基频处的稳定轴清晰可见,充分说明本文提出的方法能够识别并剔除与结构固有频率相近的谐波成分造成的虚假模态.
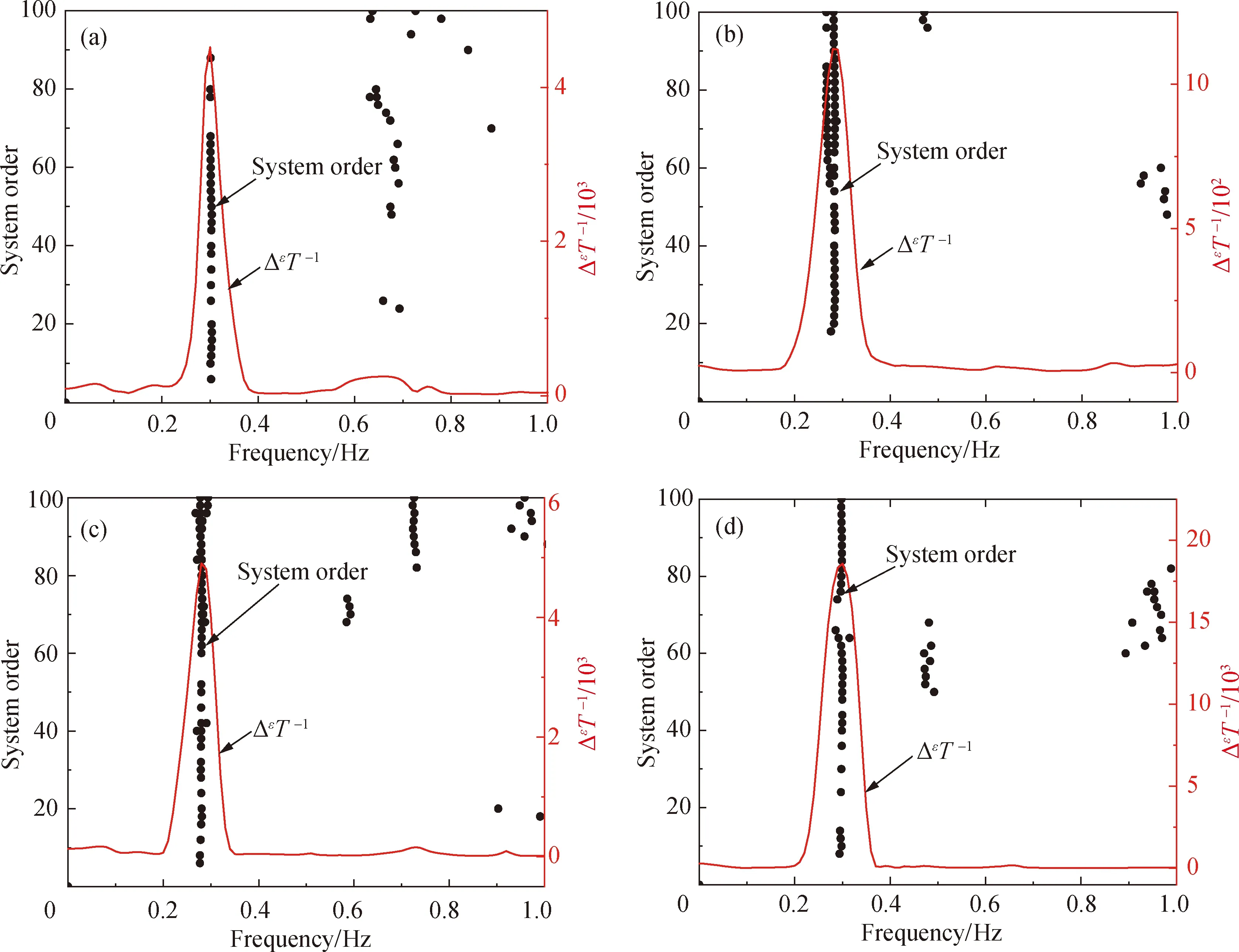
(a)~(d)分别表示工况6、工况3、工况4和工况5.图5 海上风机一阶模态稳定图Fig.5 First-order modal stability diagram of offshore wind turbine
为验证本文方法在不同转速和风速下均具有良好的适用性,应用该方法依次对其他运行工况进行模态参数识别,并生成对应的稳定图(图5(b~d)).可见风机在达到额定风速和额定转速的过程中,谐波干扰逐渐加重,但在结合SPSDT函数的稳定图中,由于谐波信号统计特性的差异,谐波倍频0.63 Hz处的稳定点始终呈现离散状态,而在结构的基频0.27~0.30 Hz附近始终存在清晰的稳定轴,很好地说明本文方法具有良好的适用性及抗谐波干扰能力.
各工况识别的模态参数对比如表2所示.可以看出,多工况下的数据识别效果十分稳定,即使在运行状态下,频率波动仍然保持在很小范围内.所识别的阻尼包含结构阻尼和气动阻尼,由于风速的增加,风机的姿态与桨距角都随着工况发生改变,导致横风向的风速增大,而横风向的气动阻尼将会随着风速增大逐渐变为负值,因此占据主要能量的基频对应的阻尼相比于识别结果呈现先增大后减小的趋势,可见识别结果合理可靠且识别精度高.

表2 不同风机各工况模态参数Tab.2 Modal parameters under different working conditions of wind turbine
3 结 论
针对风机结构在高转速运行状态下易受谐波干扰而导致无法准确识别工作模态的不足,本文提出了基于SPSDT的海上风机工作模态参数识别方法.该方法无需复杂的信号前处理,通过传递比函数并利用随机响应与谐波响应的统计特性差异,可有效地区分结构工作模态与谐波干扰.基于某海上风机在停机工况下的加速度和应变数据的模态识别结果,验证了应变模态分析方法的可行性.通过海上风机工作状态下各工况数据的实测应变数据,进一步证明SPSDT函数能够有效克服谐波干扰,准确识别不同工况下风机的工作模态.本方法有望发展成为分析风机振动特性的实用方法,也可分析其他配有旋转设备结构的模态参数.
