基于UWB的地下停车场车辆定位系统设计与实现
2021-06-16周伟江
周伟江
(同致电子科技(厦门)有限公司,福建厦门,361006)
汽车是当前社会交通运行中非常重要的代步工具,对于现代社会运行和发展也起到了一定的作用。并且随着现代社会的发展,汽车车辆逐渐增加,为了满足汽车车辆停位,在商场、建筑住宅区以及公共设施周边都设置有大型地下停车场,而在现代化停车场建设中,车辆定位系统的建设和使用极为关键,对于停车场服务效率提升有重要的作用。
1 停车场车辆定位系统的建设和发展
在当前地下停车场建设中,选择使用UWB(超宽带)定位系统,UWB定位技术研究采用频谱带宽信号进行实际的信息交流传达,并实现了地下环境内的信息高效传达,解决了GPS技术应用中定位偏差以及信息传播效率较差的问题。根据多次试验检测证明,UWB技术可以实现多层掌握之间的距离测定和位置测定,非常适合应用于现代化停车场定位系统设计当中。
2 基于UWB定位系统地下停车场车辆定位系统设计
UWB定位系统能够在较为封闭的环境下实现定位以及定位信息传达,所以在现代化地下停车场定位系统研究的过程中,相关专家开始研究利用地下UWB技术在地下停车场当中应用,保证停车应用更加高效。
以下是本文笔者进行基于UWB定位系统地下停车场车辆定位系统设计的具体总结。
■2.1 UWB地下停车定位系统的整体模块设计
UWB地下停车场车辆定位系统设计,其设计目标是为了实现停车场的汽车车辆定位,从而实现地下停车场的高效率运行。而在实际的UWB地下停车定位系统设计中,其主要包括有手机智能终端模块、上位机和无线网络模块以及标签节点模块等共同组成,通过各部分模块的良好设计,保证地下停车定位系统工作运行能够更加高效。图1为地下停车场车辆UWB定位系统中各组织框架。
在UWB地下停车场车辆定位系统设计的过程中,其设计功能主要包括有定位功能以及导航功能两大模块,保证系统工作运行更有效率。首先,UWB地下停车场车辆定位系统的定位功能是其应用过程中的重要系统,在其具体应用的过程中,定位系统的核心工作组件是系统内部的标签节点。其次,在系统进行导航的过程中,其主要是汽车停车场内的标签节点发挥作用,在上位机系统获取汽车数据后,同时对停车场内部的标签信息进行采集,并使停车场内部最近的三个锚节点测量信息传输到上位机系统当中,上位机系统当中利用内部距离计算系统进行实际的计算,通过计算位置和距离信息,保证系统定位系统能够对汽车进行和定位和最近锚节点位置信息导航。

图1 地下停车场车辆UWB定位系统框架图
■2.2 UWB地下停车场车辆测距定位系统
UWB地下停车场车辆定位设计过程中,锚节点定位距离测量是非常重要的组成部分,而在实际的系统设计中,应该注重对系统的测距定位方法进行设计。在本文研究的UWB地下停车场车辆定位设计过程中,去设计的无线传输模块为DWM1000,而为了保证实际的工作运行中网络传输良好,在我具体网络协议设计中采用了IEEE 802.15.4-2011 网络协议,通过网络协议的设定保证系统工作运行更加有效。在实际的系统运行中,DWM1000是距离测定的重要组成部分,直接关系到距离测定的质量,对于其工作效率也有非常重要的作用。采用DWM1000无线测距系统的测距距离达到300m左右,其理论最大测距精度可以达到±10cm,其测距距离可以满足现代大中型停车场的需求,同时其精度也符合定位要求,以下是对UWB测距模块进行的具体分析。
(1)测距定位方法的设计
在本文研究中使用到的DWM1000无线传输采用TDOA方法进行合理定位,TDOA方法方法定位是指实际的定位中,考虑到定位点到各参照点的时间。在实际的标签节点定位过程中,选择使用到TDOA双向距离测定。具体测定中,由系统中的锚节点数显发送广播信息到标签节点,并记录相关时间。其次,在实际的系统使用中,从标签节点发送到广播信息送到锚节点,也同时计算时间。而通过标签节点和锚节点信息发送时间可以准确的计算出,广播信息的传播时间,而通过广播信息的传播速度就可以准确的计算出实际距离,测量出标签节点到锚节点的传输距离。
(2)UWB定位模块通信接口
UWB定位模块通信接口模块,也是系统工作过程中的重要模块,对于系统工作运行起到了非常关键的作用。在本文研究的DWM1000无线传输系统中,其系统工作模块主要采用UWB无线收发模块作为系统的信息传输模块,而在其通信结构设计中,选择是应用SPI接口设计。保证了系统工作效率更加高效。图2 为DWM1000模块内部组成结构图。从图2中可以发现,DWM1000模块系统中主要包括有模拟接收装置模块、模拟发射装置模块、核心芯片模块、电源系统模块、SPI通信接口设计,POL和PHA系统控制设计,保证系统设计应用能够更加高效。从而保证系统能够更加高效的完成工作运行。在实际的系统操作中,SPI接口模块,实现了W1000模块传输初始化、配置和测距数据,并同时实现了系统的良好工作运行。
(3)UWB锚节点几何优化布局

图2 DWM1000模块内部组成结构图
UWB锚节点几何优化布局也是系统建设过程中的重要组成部分,直接关系到系统的工作运行质量,保证系统运行能够更加高效。而在实际的UWB锚节点几何布局过程中,应该根据停车场的建设面积完成系统的合理布局。本次试验设计中选择设计停车场面积为3511.68m2,其中停车场长度和宽度分别设置为94.4m以及37.2m,该停车场站内设置有103个停车位置。而在实际的系统定位过程中,UWB锚节点为固定位置,而实际的标签节点是移动性,所以在具体锚节点布局规划过程中应该保证锚节点布局后能够覆盖标签节点在整个系统当中的锚点位置,保证标签节点的实际的定位测量能够更加精准。而在几何布局的过程中,一般可以选择正多变形方式进行锚节点设计,如三角形以及正六边形等,根据有实际的停车场面积而定。而在本次研究过程中,选择使用正六边形进行锚节点设计能够符合案例停车场的优化设计。图3为具体的锚节点配置结构图。根据图3所示,锚节点选择正六边结合图形,并选择正六边形的定点作为锚节点设计,保证其能够覆盖标签节点的移动路径,实现定位优化精准。

3 停车场定位系统实际试验测试分析
本文为了研究设计停车场UWB定位系统的实际功能性,在当前汽车定位系统工作中,进行了实际的系统测试。测试中选择在某地下停车场内部设计12个锚节点,其具体布置图如图4所示。试验中对设计使用的DWM1000的测距性能进行试验检测,检测中选择使用DWM1000检测以及激光测距两种方法检测,并进行合理的数据对比。在实际的试验测试中,选择进行就试验数据对比,其中9次试验中,UWB定位系统的测距与激光测距的最大差距为0.72m作用,从汽车停车宽度设计而言,不到一个停车为距离,其定位精度在接受范围之内。另外,在试验检测过程中,还针对定位性能进行测试,在车速为5km/h情况下,其车辆定位足够精准。
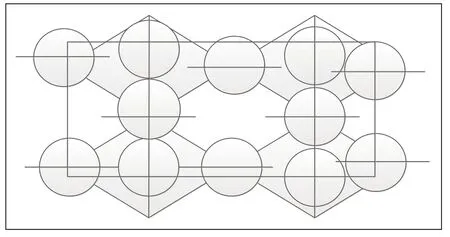
图4 试验中停车场锚节点布局规划图
4 结束语
通过本次UWB的地下停车场车辆定位系统设计定位以及测距都非常有效。希望本文能够对UWB的地下停车场车辆定位系统设计有所帮助。
