开关磁阻电动机控制技术分析
2021-06-16孙海波
孙海波
(山东科汇电力自动化股份有限公司,山东淄博,255000)
0 引言
开关磁阻电动机,有其强大驱动系统,该结构能发挥出较为优异的控制应用性能,而在驱动系统中,各项设备模块共同组成驱动体系,帮助电动机能在较高控制效果下,完成各类操作。SRD驱动系统属全新调速型系统,相比于直流驱动、交流驱动,调速驱动能具备稳定性强、操作失误率低等优势,且具备较大发展空间,所以对其控制技术加以研究,有其必要性。
1 开关磁阻电动机其应用特征
当作为调速驱动而进行使用时,电动机应具备一定特征,确保驱动系统能保持相对稳定状态,维持较高应用效率。第一,电动机其结构简单且坚固。电动机中转子是依靠硅钢片进行叠压形成,而定子线圈需要采用集中绕组方式,由此整个电动机结构凭借简单工艺,可更好作用于不良环境,如高温、强振动等。第二,电动机能够作用的调速范围较广,并且操作灵活,便于电动机完成各类特殊需求下的机械使用途径,并且在宽广转速下,电动机可取得更高运行效率,所以电动机可完成多数控制需求工作。第三,电动机损耗主要源自定子,转子因为并不具备永磁体,所以可在温升情况下依旧保持良好效率进行运作,而电动机整体降温冷却效率较高,因此电动机能在较大弹性环境下完成相关应用。不同的应用特征都将影响电动机实际运作效率,但电动机整体硬件性能优异,可以在不良环境中完成调速结果,由此可在舰船等作业环境下,有极大应用优势。
2 SRD微机控制的硬件设计
■2.1 结构设计
电动机及其相关设备,是开关磁阻的重要部分,其结构简单,对比异步电动机,设计因素更简洁,由此在功率变换器上也具备简单电路结构,所以其设计、制造成本很低,能拥有较大应用性价比。但电动机实现控制,主要还要参考相关运行条件,所以当不同种类转子其位置发生改变时,绕组开关器件还易发生通断行为,为保持电动机性能稳定,需要对其结构加以完善设计。电动机不仅需要操作灵活,更要保持运行控制中的简单性,所以现阶段较为复杂的控制行为,将不利于操作顺利、便捷完成,应在结构设计上将硬件设备融合相关软件微机控制,确保整个机械系统能保持较高控制成效。
为充分简化电路,需要不断挖掘电动机其控制优势,以便在设计上及时发掘出相应控制技巧,从而可确定其显示的信息功能,在将装置做以智能应用期间,可采取微机控制模式,将调速驱动系统确保运作。所以微机控制系统在应用设计时,需要具备各类特征优势。比如无论低俗高速运转,都应保持恒定特性;起动、制动等模式下良好转换;调节速度较为方便、即时;当前速度有所显示等。为达成上述需求,需要完整设计微机控制系统,以便更好促进电力推进系统能完成硬件组成中的结构设计工作[1]。
■2.2 硬件设计
在驱动系统中,存在两个反馈机制,分别为速度反馈及电流反馈,两种反馈机制能展示出现阶段驱动系统的运转效率,更好提升电动机控制成效。其中速度反馈主要从位置传感器中取得相关信号,并由此判断转子位置,可良好掌控转子工作效率。简化整个硬件电路结构,可以借助DSP微处理器做以控制方案的制定,并由软件加以实现,该软件需要将各类功能加以实现,以便完善驱动系统的硬件功能呈现。
比如需要将转子位置做以准确跟踪,并要把位置信号及时输出,通过功率变换器来把相关的开关器件做以控制口令的执行,确保将绕组励磁;从转子位置视角观之,位置信息应做以算法讨论,由此可将转子速度数值准确得出,此时利用速度偏差分析办法,确认闭环操作落实时间,由此得到较高效控制效果。微机控制下,驱动系统无论采用何种控制状态,都应将软件、硬件加以结合使用,共同作用于控制操作。为提升微机控制成效,还要在硬件系统中完成CPU、传感器等设备的物质基础建设,更为重要的是将控制思想加以确定,本文试析Bang-bang方式,进行对整个驱动系统的控制,该方式可对不同参数做以较快响应,从而提升控制行为其精准性。整体硬件结构的设计方案如图1所示。
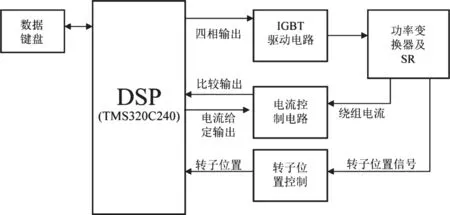
图1 整体硬件结构
3 SRD系统程序框图的设计
该系统是将中断服务等程序进行综合应用的一类系统,来完成系统程序的完整性搭建,对整个设计项目起到框架作用。其中主程序能够结合起完整的系统初始模板,进行运转,期间联合各子程序,负责支持完整框架运行作用。另外主程序还可对转子设备进行跟踪,确保其位置信息能够按照正确相序来做以输出,保证功率变换器能得到稳定、真实的位置数据。当CPU发出中断信号后,响应操作由此结束,控制程序循环失效。而专用的子程序是在既定参数下能够完成较高应用特性的程序类型,通过已给定参数,专用子程序可将其转变为参考电流形式,由此在参数转换间完成相关控制,比如APC控制或CCC控制等[2]。框图设计期间,参数需要做以不断刷新,以此来提高控制行为的时效性,其中应刷新参数包括电动机转速及相电流等。
4 SRD舰船电力推进设计
■4.1 系统组成
系统使用到的机械结构为四相8/6,并使用11KW功率下的开关磁阻电动机、非回馈式能量电流斩波电路形式的功率变换器,并将IGBT作为主开关设备。当基级的驱动信号传来时,需要借助DSP接口数据传输线进行承接,并在DSP设备下的软件中进行32位浮点计算,以此来将数据信号进行切实获取,保证系统稳定。电动机设备借由传动杆装置来带动船桨,进而产生推力,促使船体前进。整个设计系统中,其硬件结构具备较高可靠性,其制造成本较低,是能完整落实的系统设计方案;其软件结构也较简单,主要通过各类程序组合完成,能帮助硬件系统完成高效运作。主程序将系统初始化,子程序在协调运作中保证系统运行效率,此时下达信号,令功率变换器能够产生正确行为,从而将开关进行开/闭模式切换。该设备下的软件结构中,能够借助系统支持,对参数等数值进行算法操作,并由此得出电流等运行状态的参考数值,更好完成相关控制行为。图2为控制系统框图。
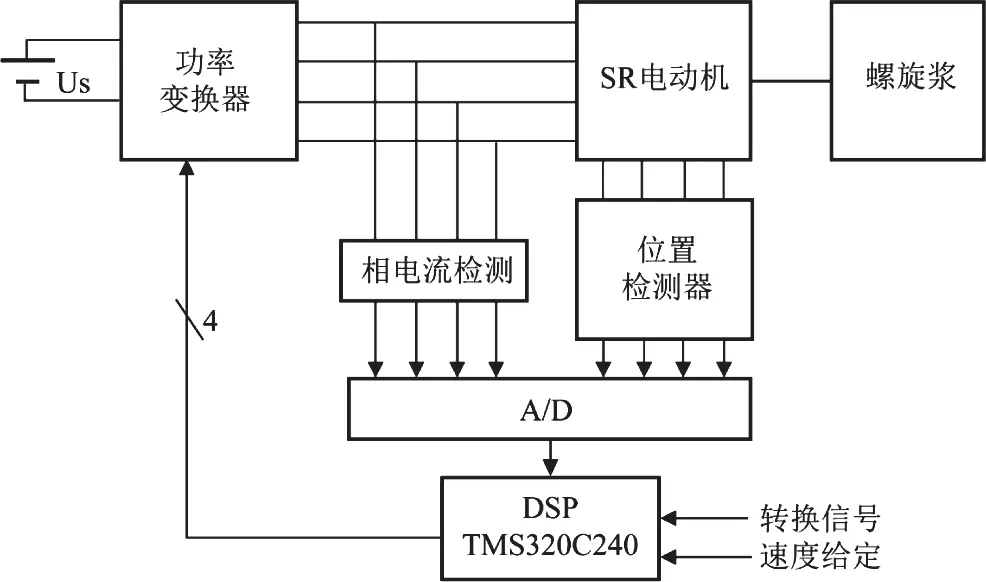
图2 控制系统框图
■4.2 系统运行
首先,启动系统,电动机设备借助转向操作实现指令信号的转变。在循环周期内,系统程序能检测到转向操作的具体方向,因此当进行方向转变时,需要重新设计方向转向标记。此时进行的各项操作,如减速、加速等,应在转向标记进行时,而自动落实转向操作。
其次,系统运行期间,位置检测系统可对转子位置敏感,确定位置后,转换计算方式,得到速度数值,并得出结论,其控制行为应在规定模式下完成。比如,实际转速小于给定转速,DSP对功率变换器采取CCC控制方式;大于额定转速,采取APC控制方式[3]。因此结合此类系统控制办法,能够将变结构控制达到较高应用成效,将其投入电动机运行控制操作下,可改善应用方式,并在实际作用下,起较优势作用,帮助电动机完成运行各类控制行为的落实。
分析不同应用状态下的电动机控制办法。第一,正车运行。首先应将正车速度设置为一定数值,其次按下A键钮,当数值信息经DSP转化为二进制显示后,可再按D键,由此将DSP控制指令加以转变,通过接口控制开关,进行正确操作,此时开关斩波的调节功率将展示输出电压,由此将速度变化传递到电动机控制系统中。第二,倒车运行。同样将速度数值给定后,此时按D键,并将次数设置为偶数次,其控制方案原理与正车运行同理,只不过需要将变换器次序稍加调整。第三,停车运行。在其电动机处于原始状态运行时,此时进行的停车操作可按下C键钮,该时刻下的设备由DSP做以控制,其功率变换器可将转子的运行速度调节为0,此时换相次序做以反转操作,此时换相控制操作、电机等也停止运作。当用户需要显示当下速度数值时,应按B键。由Bang-bang控制下的驱动系统,能将各参数控制操作变得更为精准,比如在CCC控制时,需要将速度数值控制下的定转速度减小,并采用周期控制方式调整位置、角度,由此便可在周期意识下来控制换相操作,良好过渡换相。
5 结论
综上,为将开关磁阻驱动系统做以性能改善,应借助先进控制策略,比如对其做以非线性时变考虑,便需要将系统控制变得复杂,不利于现实操作可行性落实,因此将开关磁阻的电动机设备加以控制策略实践,是基于成本、操作等因素下的最好选择结果。选择使用Bang-bang控制办法,能减轻设计者负担,并借助DSP微处理器,在较少运算基础上,可大幅提升系统控制其响应效率,保障控制精度。开关磁阻电动机能在较简单结构、调速效果高等应用优势中,为自动化产业提供较高应用成效,便于智能化操作,因此未来将会迎来更广阔市场。
