变桨距四旋翼飞行器的研究
2021-06-16吴湘莲沈旭东
吴湘莲,沈旭东
(嘉兴职业技术学院,浙江嘉兴,314000)
1 国内外研究现状
旋翼飞行器的出现较早,但是由于当时的技术发展有限,所以直到近几年旋翼飞行器才得到迅速的发展。目前由美国Dragan flyer公司开发研制的。Dragan flyer四旋翼飞行器已经推出了第四代产品,它是典型的带遥控的航模控制四旋翼飞行器。其机身的宽度为72cm,高度为18cm,螺旋桨的直径为28cm,起飞为513g,机身采用碳纤维复合材料制成,并且装有2.4GHz的无线传输摄像头,可以在大概距离800m的范围内进行无线遥控,此产品主要应用于航拍。机载的控制系统可以通过控制四个电机的转速达到控制飞行器的姿态控制。另外,为了增加姿态的稳定控制还使用了三个压电晶体陀螺仪。
国内的四旋翼研究起步较晚,与国外相比有一定的差距,国内主要从事四旋翼飞行器研究的高校有清华大学、哈尔滨工业大学、南京航空航天大学、上海交通大学等。虽然国内的多旋翼研究起步较晚,但是由于有先前的发展经验借鉴,所以起点较高,近年来也取得了一些成果。其中清华大学在四旋翼控制中引入了红外测距仪,并将距离数据与姿态传感器数据进行融合,实现了三维空间中的自主定位与飞行。早在 2006 年国防科技大学就开始了四旋翼的研发工作,第一代试验样机起飞重量 750g,机架长度 72cm,每个电机经过减速齿减速为旋翼螺旋桨提供动力。并且与常规的四旋翼不同的是,其内部采用基于 Backstepping 的控制算法进行控制,取得了一定的研究成果。
2 变桨距四旋翼飞行器整机结构研究
■2.1 支架结构
四旋翼飞行器骨架支架结构,采用了两种方案进行比对:方案一,采用工字型结构。原先设计的整体外形是工字型,但是在后来的测试过程中发现,这样的结构很容易扭,如图1所示。经过反复调整测试,在结构上调整为II型,可以有效的提高整机的强度,如图2所示,同时采用了双电机的设计方式。
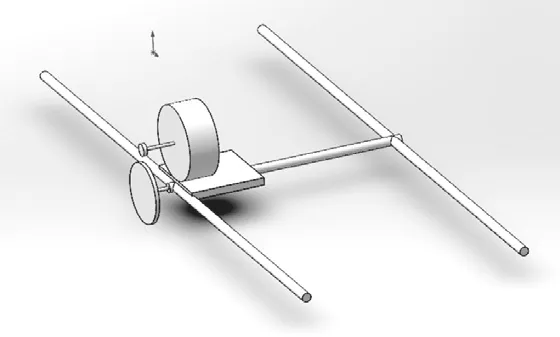
图1 工字型结构

图2 II字型结构
在外形结构方面,因为无人机对稳定性和灵活性有很严的要求,本项目选择的材料具有强度高同时重量轻的特性,其中无人机的机臂选择碳管材质,电机板为环氧树脂板,变距部分因为对强度和阻尼的严格要求,直接购买成品,航模直升机的尾波箱与其结构相似,稍作改动即可使用,一些形状特殊的连接件,画出三维图后,使用3D打印的技术制作,节省时间与经费。为了达到减轻重量的目的,螺栓和螺柱我们选择用尼龙材质取代金属材质。
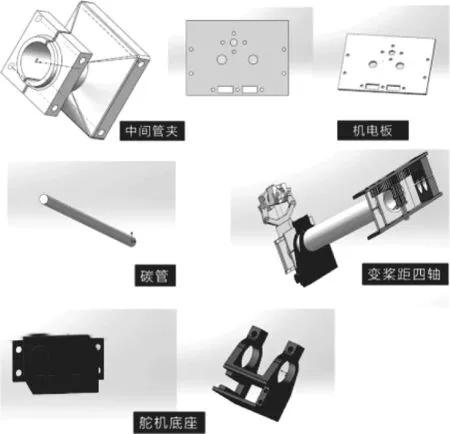
图3 关键部件
中间管夹是用来固定电机板夹和变桨距四轴的,而机电板固定电机和3个齿轮,通过碳管管夹将2跟碳管和变桨距四轴相连起到稳定作用。
■2.2 传动结构
传动结构主要由同步带、同步轮、轴承、限位圈等零件组成,用于将电机输出的转矩传动到每一个桨的轴上,使其能够转动,这是整架无人机能够起飞的保证,传动系统设计要求配合精密,飞行过程中尽量减少震动,因此要做的足够稳定可靠。
动力由电动机提供,而无刷电动机是由三相无刷电子调速器控制动力,通过波轮箱将动力平均反向的提供给两个桨叶,通过高精度数字金属舵机控制桨叶螺距,改变动力方向,达到飞机的控制目的。
图4、图5为波轮箱的模型图,它是由3个齿轮组成,最小的齿轮是由马达带动的,通过最小的齿轮带动2个大齿轮做反向的匀速转动。

图4 波轮箱正面
轴传动和皮带传动的选择:现在市场上大多数采用的是轴传动,现代的工业制造技术已经很发达,制造的精密度也是很高的,轴传动的精密度很高,但是在制作过程中很难实现,而皮带传动不仅可以保证所需的效果,同时降低了对精度的要求,提高系统的可靠性和安全性。
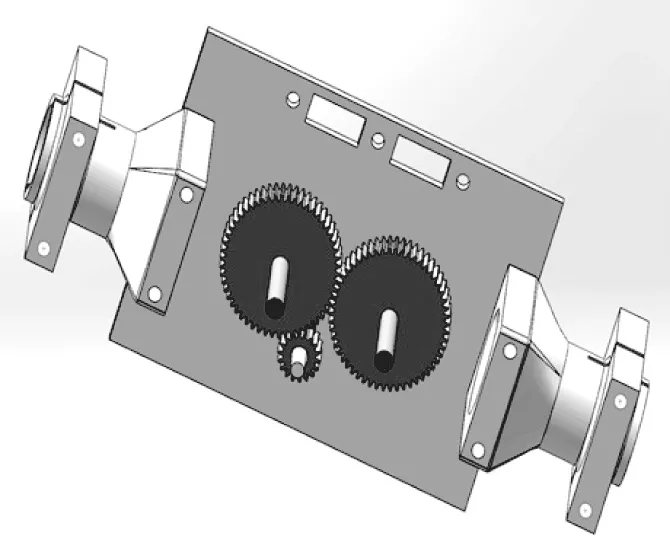
图5 波轮箱底部图
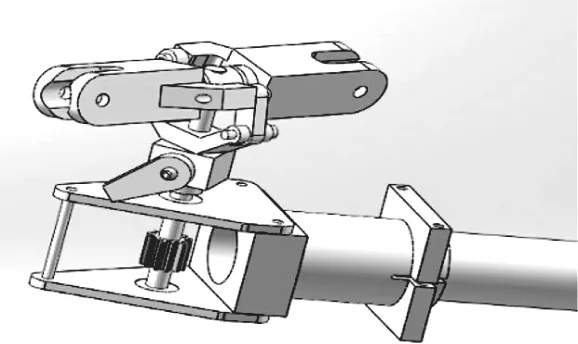
图6 变桨距四轴

图7 皮带传动
■2.3 动力系统
动力系统主要包括电池,电机,电调,舵机和桨叶,选择合适的配件能够在功率一定的情况下获得更大的升力,也就是无人机能够保持更长的飞行时间,提供更好的飞行体验。
该无人机采用可充锂电池作为动力来源,给电机供电,使其转动,同时给接收机和飞机的控制系统供电,使其能正常工作,进而能调节电机转速和舵机舵量,这是整架无人机得以飞行的基础。
(1)动力电池
蓄电池是无人机的供电设备,本项目选择3S 5200mah 35C电池,电压为11.1V,容量5200mAh,放电倍率35C,最大放电电流为182A,最大充电电流26A,在理论论证中,能够满足无人机对电压电流的需要同时保证较长的飞行时间。

图8 蓄电池

图9 电机
(2)电调设备
电子调速器是控制电机转速的电子设备,俗称电调。它将控制系统输出的信号进行分析计算,输出给电机,从而控制电机的转速和转向。主要参数有持续电流,瞬间电流,锂电池节数,BEC类型和重量等,在选择过程中,注意持续电流和锂电池节数,蓄电池电芯数应符合锂电池节数要求,持续电流在达到电机工作要求,同时不宜超过蓄电池的最大放电电流。
(3)舵机控制
舵机是控制螺旋桨螺距的设备,对它的响应速度和精度要求极高。一个性能优良的舵机对无人机整体性能的提高具有至关重要的作用。而一架四轴无人机至少需要配备四个高性能舵机。
(4)螺旋桨桨叶
螺旋桨是无人机得以产生升力的关键部件,依据帕努利定理—“流体对周围的物质产生的压力与流体的相对速度成反比”。螺旋桨就好像一个竖放的机翼,凸起面向前,平滑面向后。旋转时压力的合力向前,推动螺旋桨向前,从而带动飞机向前。因为我们设计的是变桨距四轴,所以桨叶又与一般的螺旋桨桨叶有所不同。我们用图10所示的螺旋桨取代常见的图11所示的桨叶形式,以达到螺距可变的目的。

图10 定桨距桨叶

图11 变桨距桨叶
■2.4 控制系统
控制系统的主要设备是飞行控制器,简称飞控,其作用是感知无人机在空间三维方向上的变化,同时根据控制者的需要,进行姿态的调整及稳定。控制系统有人工和自动控制两部分,其中人工控制是指将无人机按照人的意愿通过遥控器给无人机发送信号,调整其飞行姿态,自动控制由无人机上带有的飞行控制系统负责,自动感知自身姿态的变化,进行相应调整,为其自动保持稳定状态。
飞行器的飞行控制系统选择成品飞控。目前市场上的几款变桨距飞控中,3DQ飞控相对稳定性好,运用先进的、专一的控制算法逻辑。具有一定的自稳功能,但每架无人机的结构,质量,重心都有所差别,因此相关数据需要在完成无人机的搭建,将飞控安装上去之后经过不断的调试得出参数。内置独立IMEU减震模块,在工业化运用中可搭配专用减震平台。可装载高精度GPS模块,实现高效定位。颠覆传统多轴的体验,独有的高精度控制和高性能手感控制系统除了飞控之外,还包括操纵者手中的遥控器和位于无人机上的接收机起达到操纵者手动控制无人机飞行姿态的目的。
3 结论
变桨距四旋翼飞行器是通过改变桨的螺距大小来改变升力的,这种控制策略可使飞行器姿态的响应和控制的延迟都变得较小,同时可以节省资源和能耗。采用两个电机的设计既达到了配平重心的目的,又减轻了单个电机的压力,用Y线将两根电机线连在一起,达到使两个电机转速相同的目的。采用皮带传动的设计是在对两种方法反复斟酌之后的选择,相比之下,皮传虽精度稍差,但性价比高,容易更换,在与轴传的比较中有着更明显的优势。变螺距的结构使得无人机的操作更为细腻,任何细微的动作都会使无人机的飞行姿态发生很大的变化,所以本项目要求飞手具有较高的无人机操作水平。
