VUP平台实验项目开发
2021-06-07陆佳琪高兴宇李明枫廖斌
陆佳琪 高兴宇 李明枫 廖斌


摘 要 为了虚拟仿真教学促进课堂教学质量,让学生沉浸式享受教学内容,引入Virtual Universe Pro(VUP)操作平台,将自动化控制、机械设计、工业机器人技术、电气与电子技术、气压液压以3D渲染逼真化效果融入实验教学中,可开设非标机械开发与实践、PLC技术控制虚拟模型、工业机器人仿真调试、气压与液压等实验。该软件在虚拟实验教学上具有逼真化和创新性,扩展了教学实验课程,对促进学生基础课程和工程实践方面学习有很大作用。
关键词 新工科;虚拟仿真教学;VUP操作平台;机电一体化;虚拟仿真实验;PLC;机器人
中图分类号:G642.423 文献标识码:B
文章编号:1671-489X(2021)14-0123-05
Abstract In order to promote virtual simulation teaching and make students feel the learning content more realistically, Virtual Universe Pro (VUP) operation platform is introduced, integrates automation control, mechanical design, industrial robot technology, electrical and electronic technology, pneumatic and hydraulic technology into the experimental teaching with 3D rendering and realistic effect. It can open non-standard mechanical development and practice, PLC technology control virtual model, industrial machine simulation debugging, pneumatic and hydraulic, script language development experiments and so on. The software is lifelike and innovative in virtual experiment teaching, and plays an important role in improving students understanding of basic courses and engineering practice.
Key words new engineering; virtual simulation teaching; virtual universe pro operation platform; mechatronics; virtual simulation experiment; PLC; robot
0 引言
虚拟仿真技术应用于课堂教学是教学活动信息化不可或缺的部分。为了培育更多动手能力强、有创新性思维的人才,提高实验教学能力水平,教育部于2013年发出《关于开展国家级虚拟仿真实验教学中心建设工作的通知》[1-2],突出虚拟现实仿真技术是信息化教学的重要成分,依据教学大纲的要求有力指导服务于教学活动[3-4]。
随着虚拟仿真教学的不断深入,为满足机械电子工程专业的教学培养目标,加快建设发展新工科,实现工科专业教学改革创新,开展虚拟制造创新教学[5]。Virtual Uni-verse Pro(VUP)是法国Irai公司研发的一款功能强大的创新型三维建模与仿真软件操作平台,集合气动液压、电工电子、数字电路、机械设计及自动化多学科领域知识,实现功能多元化的机电一体化仿真系统[6],为实现虚拟仿真教学提供了优质的教学条件。对于培养复合型人才,以VUP操作平台为基础平台,充分利用软件自带库资源及可通信软件联合调控资源,开发切实可行的方案。所开发的实验项目不仅用于本科实验教学,还可以在经过渲染修饰后用于参加VR大赛,对促进复合型虚拟仿真教学和加强工业产业化发展具有重要意义[7]。
利用VUP操作平台可代替实际教学设备,基于多元化教学资源,以3D渲染技术以及物理引擎呈现最真实的仿真效果给学生。该软件可提供一个完全开放的虚拟设备开发平台丰富实验种类,提高实验开设率,实现零风险操作与演示,增强实验安全性,重点解决硬件实验设备资源有限及实验安全隐患的问题[8-9]。
1 VUP机电一体化软件简介
VUP作为一款机电一体化软件,企业与科研院所提出的方案可在该平台上得到验证,不合理的地方可以进行修改;研发出的实际硬件设备可以根据虚拟成品进行反复试验调试,提高研究的效率[10]。其中,可以与PLC进行通信连接,以真实PLC的I/O对虚拟对象进行工艺动作控制,节省电气PLC的实体调试时间;可以与主要机器人控制软件进行通信联立控制,如ABB、FANUC等;可以根据电气电路机械装置绘制相应的二维电气电路原理图,并可进行实时状态的仿真;可以根据脚本语言进行自定义仿真。图1为VUP平台基本功能。
2 设备研发与PLC调试
VUP机电一体化软件是通过三维绘制软件导出3DXML、3DS格式进行导入的。通过将零散的、独立的零件设置父子级的方式,按照父级带动子级运动的原则进行设置,实现动作零件的打包与移动。仿真系统设置物理属性,添加重力、摩擦系數、弹性系数、转动惯量、可穿透、线性阻尼等特征,根据状态模块的需要分别进行设置,配置各种机械传动的功能、动作(如直线运动、旋转),设定速度、加速度、检测传感器等,实现想要的动作目的与功能检测目的。通过添加碰撞、干涉检测、故障反馈效果等,达到真实的实物效果;并且可与实际PLC控制设备进行信号交互,接收控制指令以及反馈传感器信号,在仿真过程中及时发现设备在程序控制下运行的各种问题并进行优化,提高设计效率并降低成本,具有可操作性,可进行动态实时仿真[11-12]。
图2为PLC控制虚拟模型。可自定义添加交互界面,建立触摸屏面板,设置触摸屏题目,添加控制按键、状态灯、模式选择,通过与I/O口进行连接通信,实现触摸屏按键控制虚拟模型的动作,有助于培养学生的工程实践能力。图3为VUP平台编辑触摸屏调试仿真模型。
3 配合机器人应用仿真
该功能需要VUP平台配合机器人仿真控制软件联合通信进行操作,机器人仿真控制软件中对机器人进行控制的同时,也在控制UVP机电一体化软件中的机器人。这里以ABB机器人为例。
Robot Studio是ABB系列机器人的虚拟仿真控制软件,在编辑器I/O系统中建立机器人的控制信号与通信的连接信号;通过逻辑传递信号的判别来使用Digital Input与Digital Out指令完成信号传递;对于多路径且不连续机器人动作,需要VUP平台与Robot Studio的节点进行连接;只有在VUP平台ABB机器人库的abbgateway与Robot Stu-dio虚拟控制软件中建立相同的I/O信号名称,才可以正常通信(设置别名“W:+信号名称”,是一般以VUP平台为主体,写入Robot Studio中;设置别名“R:+信号名称”,是VUP平台读取Robot Studio仿真软件)。让学生了解机电一体化虚拟仿真控制的同时接触机器人虚拟仿真,对一些有机器人参与虚拟仿真的项目具有一定的参考价值。图4所示是VUP平台与Robot Studio虚拟仿真软件进行联合通信控制。
4 原理图与三维图联动仿真
4.1 二维气动原理图联动实验仿真
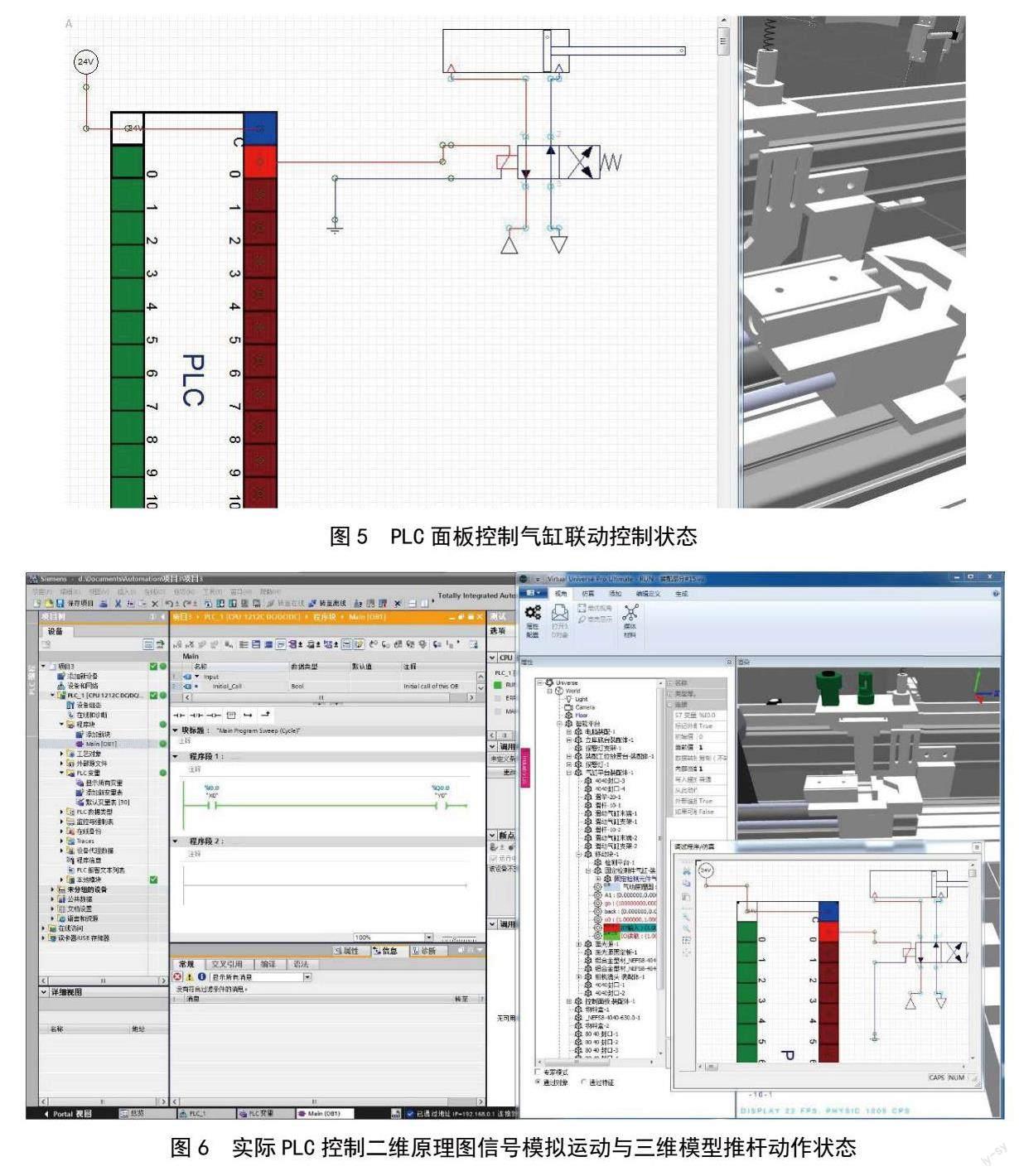
在建立气动三维模型的基础上,结合二维实时联动仿真,可以让学生更加直观地理解其原理。选择二位四通的换向阀、双作用气缸及气源发生设置,使用连线形式表示气动通路,当然可根据实际气动装置来组建相应的气动回路。设置电气回路电磁阀A1为写入信号,气缸go设置为读取信号且与气缸伸出信号相关联,气缸back信号与缩回相关联;给气缸伸出一个动作后,将二维原理图与三维模型图关联起来,实现二维原理图与三维模型图动作的实时协同动作,也可以调用PLC面板,用实体PLC与软件中PLC面板进行映射,进而实现PLC程序调控二维原理图与三维模型图。
在PLC中o0有信号时换向阀有动作,气缸推出,PLC平面可以由实际的PLC来控制,西门子S7-1200PLC的控制软件博图v14与VUP平台通过通信工具NetToPLCSIM进行连接,联接信号与西门子输入地址要相同。对博图软件进行仿真,在通信工具中的PLCSIM地址上设置博图SIM的虚拟地址,Network地址与VUP平台地址保持一致[13]。通过在常开按钮前设置线圈的方法,博途软件设置为监控状态。线圈上电,常开触点闭合,通信成功后,VUP平台自然会信号为1,则会带动二维原理图模拟气缸运动,三维模型图推杆运行,达到外部实体PLC控制二维原理图信号模拟运动和三维模型推杆动作实时联动的效果,可轻松让学生理解学习气动知识原理及各组件的功能。图5为PLC面板中o0有信号时换向阀使得动作推出的状态图,图6是实际PLC程序控制二维原理图信号模拟运动与三维模型推杆动作的状态图。
4.2 电子电路控制原理图实验仿真
通过设计电子电路控制回路,设置停止按钮SB1、启动按钮SB2、线圈KM、三相异步电动机、24 V电源及接地,使之成为回路。在VUP平台中AUTOMSIM的变量与原理图的名称要相一致,SB1与SB2均为模型外部所给的信号,KM线圈是整体原理图给的三维模型图的启动信号,SB1、SB2设置为写入AUTOMSIM,KM设置为从AUTOMSIM读取信号,这样可形象表述三相异步电动机带动传送带运动从二维原理图到三维运动控制过程,可向学生清晰明了展示三相异步电动机启动要点连结。图7为二维原理图控制电路仿真。
5 结束语
本文利用VUP机电一体化实验项目開发平台,可以开设包括机械自动化、PLC控制、机器人、电子电路等方面的虚拟仿真实验,综合多学科知识于同一仿真软件,对于学生理解掌握机械、控制、机器人、电子电路及脚本语言等技术有很大的帮助,对于培养新工科背景下的综合型人才起到重要作用[15]。该软件平台应用广泛,可进行个性化定制实验课程,丰富高校虚拟仿真实验课程,在高校教学中实用性很强,用途多样。
参考文献
[1]关于开展国家级虚拟仿真实验教学中心建设工作的通知[EB/OL].(2013-08-13)[2021-01-03].http://www.moe.gov.cn/s78/A08/tongzhi/201308/t20130821_156121.html.
[2]程海丽,张敬宗,王献云,等.谈虚拟仿真实验教学中心建设中的“虚实结合”原则[J].甘肃科技,2017(3):50-53.
[3]李平,毛昌杰,徐进.开展国家级虚拟仿真实验教学中心建设提高高校实验教学信息化水平[J].实验室研究与探索,2013(11):5-8.
[4]孙振明,侯运炳,王雷.云渲染技术在虚拟仿真教学系统中的应用[J].实验技术与管理,2020(7):136-139.
[5]“新工科”建设复旦共识[J].复旦教育论坛,2017(2):27-28.
[6]岳东海.虚拟样机技术在慕课教育教学中的应用研究[J].机械职业教育,2017(9):59-62.
[7]胡洪钧,谢立敏,梁晓,等.工业机器人实验项目开发与实践[J].实验技术与管理,2015(9):201-203,207.
[8]陈子琦.鸡蛋加工生产线自动上料装置的分析与机电一体化仿真研究[D].武汉:华中农业大学,2017.
[9]吴曼琳.鸡蛋分级包装生产线自动控制系统的设计与试验[D].武汉:华中农业大学,2017.
[10]刘继光,袁浩,汪泽,等.基于Irai的啤酒生产线虚拟控制平台设计与实现[J].实验技术与管理,2015(6):127-129.
[11]何苗.基于Irai的GF生产线的仿真平台的搭建[J].现代制造技术与装备,2019(2):196-197.
[12]ZHAO W, LIU M Y, HAN L. Virtual Simulation Trai-ning Course Construction Based on Irai Platform[M]//青岛中石海学文化传媒有限公司会议论文集.Advances in Social Science, Education and Humanities Research.2017(27):252-256.
[13]吕秀锋,黄倩.C语言程序设计:现代方法[M].2版.北京:人民邮电出版社,2010.
[14]杨兰.计算机软件开发的JAVA编程语言及其实际应用[J].电子设计工程.2017(21)49-52,56.
[15]李明枫,贺晓莹,陆佳琪,等.基于机器视觉的机器人智能分拣实验平台开发[J].实验技术与管理,2019(4):87-91.
