关节臂式测量机校准装置研究及测量结果不确定度评定
2021-06-06龙宽龚帆罗建军
龙宽 龚帆 罗建军

摘要:关节臂式测量设备是一种便携式且通用性强的测量系统,广泛应用于航空航天、整车及零部件、造船等机械加工行业。目前我们对关节臂的校准采用的方法为传统的“量块法”,用关节臂测头接触量块两端工作面,通过测量软件对测量值与标准量块偏差值相比对的方式进行校准。但量块最长为1000mm,且无法拼接,无法实现关节臂测量机全范围校准,实用性不高。
关键词:关节臂式测量机校准装置;球棒;球棒姿态调整装置
中图分类号:TH721.1 文献标识码:A 文章编号:1674-957X(2021)09-0091-02
1 标准装置设计
1.1 整体方案
为实现对关节臂式三维测量设备的校准,需开发关节臂式三维测量设备校准用标准器组校准装置一套:包括球棒、球体及内锥窝、支撑尺架、球棒姿态调整装置等。球棒可实现自由组合拼接,自由组合至所能组合的各种长度标准值,拆装方便快捷,结构稳定。
1.2 设计开发可拼装式球棒一套
球棒采用碳素纤维材料,热膨胀系数小于1.6×10-6℃-1,测量范围满足(300~2800mm),其中1000mm球棒2支、500mm球棒1支、300mm球棒1支,可實现尺寸自由组合拼接。球棒两端球体采用铟钢材料,热膨胀系数小于1.2×10-6℃-1,球体与球棒可自由拆装,直径为?准38.1mm,球度1.5μm,球体含内锥窝,其中锥窝直径?准3mm球体2个,内锥直径?准6mm球体2个。
1.3 设计制作便携式支架及姿态可调机构
支撑架主体采用碳素纤维材料,具备姿态调整机构及支撑尺架,能够实现球棒姿态调整与稳定支撑,方便在线校准。支撑尺架需满足艾力点支撑原则,可根据球棒的选用范围调整艾力点位置,姿态调整机构需具备球棒紧固装置,确保在对仪器校准过程中球棒无松动及旋转。支架支撑高度需满足850~1400mm可调,姿态调整范围0~90°,支架可收缩、轻便,能方便携带。
2 实施过程
分别对球棒头固定装置、支撑架、球棒姿态调整装置等进行技术选型设计,整体要求方便拆卸安装,结构稳定牢固,方便运输。
球棒采用线胀系数极低殷钢材料制成,分别由0.3m、0.5m、1m几个长度值构成。可单独使用也可如图1进行拼接,两两采用螺纹连接方式,两端安装吸附式靶座用于安装球窝。可用于关节臂测量机等系统在使用前、使用后或使用期间空间特定矢量方向上测量能力的评定。
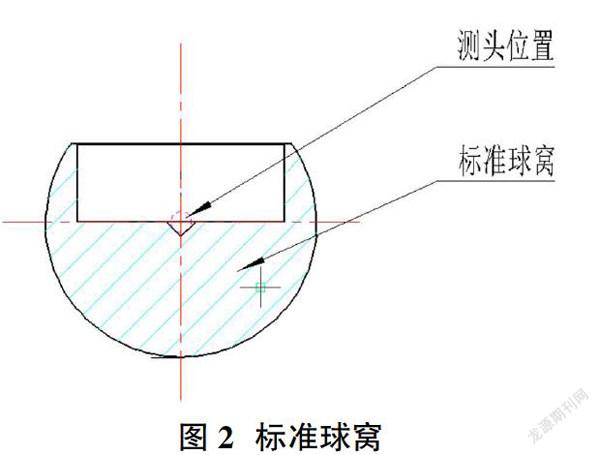
标准球窝是专门用于关节臂式坐标测量机校准的专用工具。其材质采用钢制结构,主体为1.5英寸标准金属球,其圆度指标达到2μm。从一侧去除内部材料,在球心位置处构造出一个标准锥窝,锥窝与测头球径(常用3mm或6mm等)相切,此时测头中心与标准球窝的球心相合,如图2所示结构,其精度达到±0.015μm。校准过程中将标准球窝放置于球棒两端,并使锥窝开口方向同向放置并处于垂直于球棒的方向,然后再进行下一步校准工作。
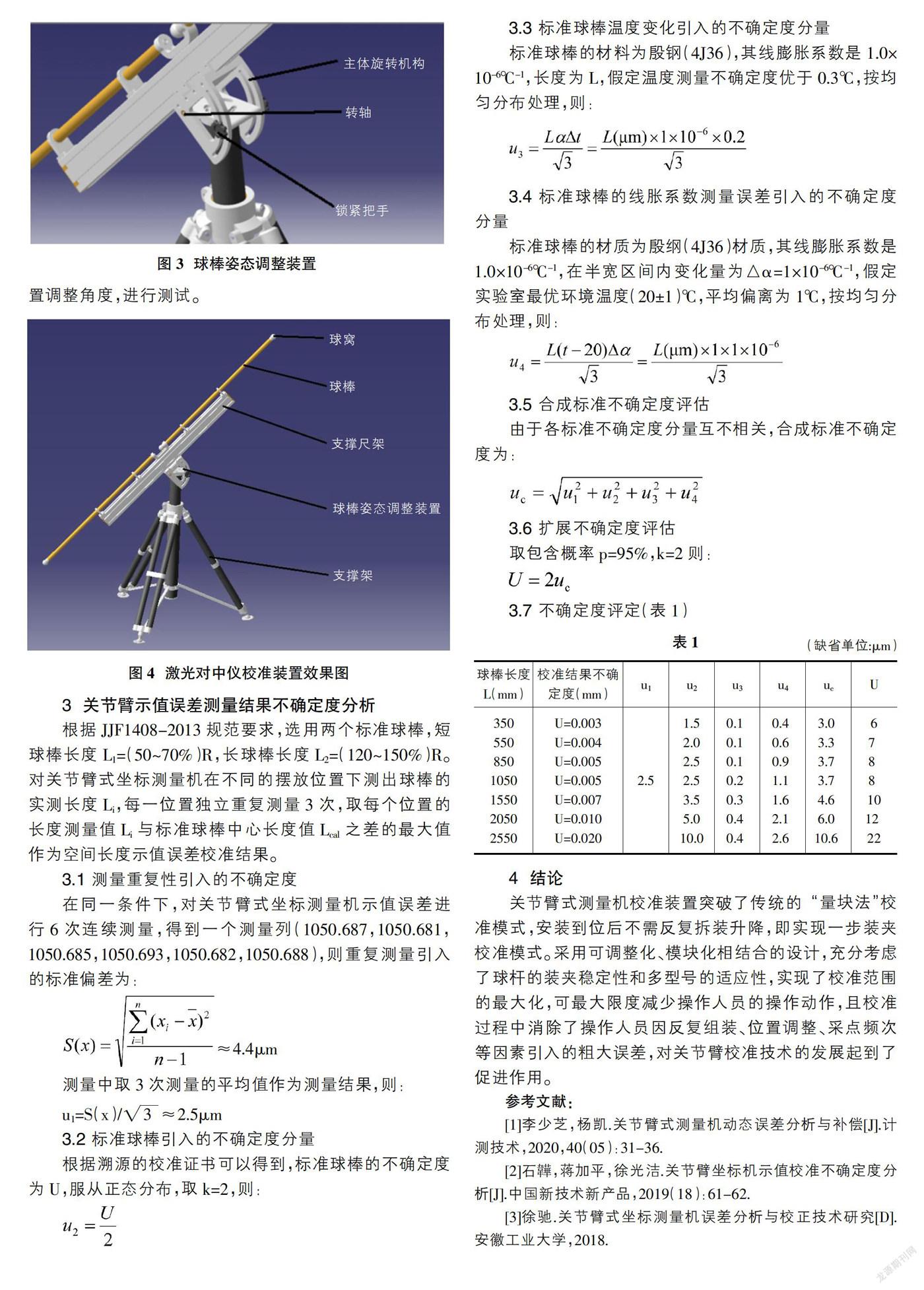
支撑尺架安装在球棒姿态调整装置顶部,由主体型材和支撑座构成,可用于对球棒的支撑和夹持,在支撑过程中通常采用艾力点支撑方式,提高标尺的稳定性和精度。球棒姿态调整装置安装在支撑架顶部(如图3所示),可通过沿转轴旋转以实现球棒0~90°方向的位置调整,固定时拧紧锁紧把手即可实现固定。
支撑架主要由碳纤维支撑组件、升降组件和抱紧组件构成,(如图4所示),其中碳纤维支撑组件和升降组件主体均由碳纤维材质构成,其余连接件由铝合金材质制作,从而保证该架体具有足够的稳定性和轻便型,便于安装运输。使用过程中松开抱紧组件,可以提起升降组件至指定工作位置,再进行抱紧既可。之后再通过球棒姿态调整装置调整角度,进行测试。
3 关节臂示值误差测量结果不确定度分析
根据JJF1408-2013规范要求,选用两个标准球棒,短球棒长度L1=(50~70%)R,长球棒长度L2=(120~150%)R。对关节臂式坐标测量机在不同的摆放位置下测出球棒的实测长度Li,每一位置独立重复测量3次,取每个位置的长度测量值Li与标准球棒中心长度值Lcal之差的最大值作为空间长度示值误差校准结果。
3.1 测量重复性引入的不确定度
在同一条件下,对关节臂式坐标测量机示值误差进行6次连续测量,得到一个测量列(1050.687,1050.681,
1050.685,1050.693,1050.682,1050.688),则重复测量引入的标准偏差为:
≈4.4μm
测量中取3次测量的平均值作为测量结果,则:
u1=S(x)/2.5μm
3.2 标准球棒引入的不确定度分量
根据溯源的校准证书可以得到,标准球棒的不确定度为U,服从正态分布,取k=2,则:
3.3 标准球棒温度变化引入的不确定度分量
标准球棒的材料为殷钢(4J36),其线膨胀系数是1.0×10-6℃-1,长度为L,假定温度测量不确定度优于0.3℃,按均匀分布处理,则:
3.4 标准球棒的线胀系数测量误差引入的不确定度分量
标准球棒的材质为殷纲(4J36)材质,其线膨胀系数是1.0×10-6℃-1,在半宽区间内变化量为△α=1×10-6℃-1,假定实验室最优环境温度(20±1)℃,平均偏离为1℃,按均匀分布处理,则:
3.5 合成标准不确定度评估
由于各标准不确定度分量互不相关,合成标准不确定度为:
3.6 扩展不确定度评估
取包含概率p=95%,k=2则:
3.7 不确定度评定(表1)
4 结论
关节臂式测量机校准装置突破了传统的“量块法”校准模式,安装到位后不需反复拆装升降,即实现一步装夹校准模式。采用可调整化、模块化相结合的设计,充分考虑了球杆的装夹稳定性和多型号的适应性,实现了校准范围的最大化,可最大限度减少操作人员的操作动作,且校准过程中消除了操作人员因反复组装、位置调整、采点频次等因素引入的粗大误差,对关节臂校准技术的发展起到了促进作用。
参考文献:
[1]李少芝,杨凯.关节臂式测量机动态误差分析与补偿[J].计测技术,2020,40(05):31-36.
[2]石韡,蒋加平,徐光洁.关节臂坐标机示值校准不确定度分析[J].中国新技术新产品,2019(18):61-62.
[3]徐驰.关节臂式坐标测量机误差分析与校正技术研究[D].安徽工业大学,2018.
作者简介:龙宽(1985-),男,湖南株洲人,本科,工程师,技术主管,研究方向为几何量计量技术。
