EBH96悬臂式掘进机远程控制系统的研究
2021-06-05闫建军
闫建军
(霍州煤电集团大地煤业有限公司,山西 临汾 041000)
引言
掘进机的应用大幅提升了桥梁、隧道、煤炭开采等行业的施工效率,因此得到了越来越多的应用。矿用掘进机主要被用于煤层的掘进、开采,也可对截割下来的煤矿进行装载和运输,同时具有自行运动的能力,通常由司机在现场操作完成。但是由于巷道内作业环境恶劣,且人体劳动强度大,所以需要对掘进机动作进行远程控制。随着现代控制技术的发展,现代掘进机向着智能化、无人化方向快速发展,可有效提高掘进机工作效率。
对掘进机的动作与行为进行分析,可以确定远程控制系统的控制对象,主要包括掘进机行走部、回转支撑液压系统、举升液压系统以及刀盘的转速等。远程控制系统实现了远程对掘进机的监控与操作,提高了掘进机的作业效率以及对操作人员的安全保障,所以远程控制系统的应用具有重要意义[1]。
1 EBH96掘进机概述
掘进机型号与种类繁多,但基本的结构类似,以EBH96型掘进机为例,对该型掘进机的结构组成、性能参数做简要介绍。掘进机基本结构包括掘进机构、运输机构、走行机构、电气系统、液压系统等,结构相对复杂。掘进机是一款综合性大型设备,其包含了岩层的截割、行走、运载等功能,该型掘进机还具有尺寸小、操作灵活、工作效率高等特点。
EBH96型掘进机最大掘进高度4.2 m,最大掘进宽度为6.0 m,爬坡能力±16°,其生产能力可达60 m3/min。掘进机通过性较好,最小离地间隙为210 mm,设备总装机功率为130 kW,设备总外形尺寸(长×宽×高)为8 120 mm×1 750 mm×1 600 mm,如图1所示的掘进机实物图[2]。

图1 EBH96型掘进机实物图
2 控制系统总体方案设计
通过对掘进机远程控制功能需求的分析,并参考其他相关的控制设计,确定本控制系统的总体方案。远程控制系统主要包括数据监控采集、控制系统、掘进机状态监控、信息显示和控制执行等,以下对控制系统的总体结构设计做简要介绍,如图2所示,为控制系统总的结构设计关系图,下面对其中主要的子系统做简要说明。
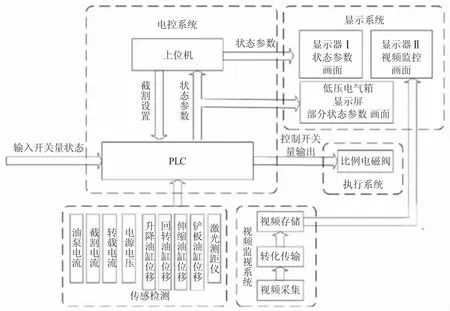
图2 掘进机远程线控系统功能图
2.1 数据采集
主要是在掘进机机身上布置各型传感器,负责采集车身的电机转速、液压系统压力和液压阀的状态、车身姿态、截割部定位信息等。数据的采集是为了尽可能反应出机器运行的实际状态,是电气控制的基础、控制的依据[3]。
2.2 控制系统
其主要逻辑是由传感器采集的数据由逻辑控制器(PLC)进行处理,输出对控制器的指令,从而达到对掘进机状态的控制,同时控制系统可将信息进行显示或由人工进行控制。
2.3 控制执行
控制执行系统主要负责接收来自控制器或者人工远程操作的控制命令,将命令信号转化为液压系统电磁阀动作控制信号,由此实现对掘进机动作的控制。
2.4 监控系统
掘进机状态监控对于判断掘进机的作业环境、姿态具有重要帮助,将采集到的视频信息通过无线网络传回地面控制中心,保证了操作人员对掘进机状态的实时监控[4]。
3 控制系统软件结构设计
控制系统的软件部分主要包括电气控制、功能相关的控制以及操作台信息显示系统,如图3所示,为控制系统软件组成结构示意图。使用相对独立的三套子系统,各自之间分工明确,同时相互协调完成对掘进机电气系统的控制。
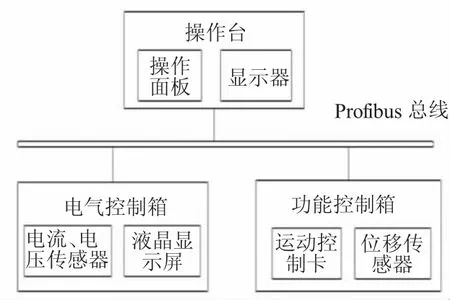
图3 电气控制系统设计
3.1 电气控制
电气控制系统主要包括掘进机电机的电流、电压传感器以及液晶显示系统的控制,本系统中对于相关参数的控制使用了PLC程序控制,程序编程在此不再一一列举。
3.2 功能系统
主要是掘进机传感器参数的采集与识别,控制器根据传感器所采集的信息,分析后由PLC模块输出给运动放大卡,控制比例电磁阀,从而控制掘进机相关油缸动作。
3.3 操作台
地面操作中心主要包括显示器以及操作控制系统,显示器主要用于显示掘进机作业时的视频监控信息,控制器则提供了掘进机动作的控制按钮。在控制中心的人员可以进行远程控制,实现人机交互式操作[5]。
4 控制系统硬件结构设计
控制系统的通信设备是实现其具体功能的基础,通信总线采用的是PROFIBUS现场控制总线方式,其传输速率可达30 MB/s,可靠性好,使用维护方便。根据该系统的结构设计,在此对系统中相关的某些传感器的选型做简要分析说明。
4.1 测距仪
选择了工业级专用的激光测距仪,用以检测掘进机和巷道间的距离,以此保障掘进机运行的安全。根据项目的实际应用情况,选择了5个SPL-C4型激光测距仪,该测距仪测量范围为0.1~12 m,测量误差小于0.1 m,工作电压12 V,传感器响应时间小于4 s,共包含3个输出端口[6]。
4.2 直线位移传感器
掘进机大部分工作部件的动作均是由液压缸驱动,而液压缸的动作可由直线位移传感器进行采集,从而准确地获取把控掘进机的动作。在此选择了LCS-16的直线位移传感器,该传感器测量行程为0~800 mm,测量误差范围为0.1%,工作电压12 V,如图4所示为该传感器实物图。
5 掘进机电控系统实现
根据掘进机的实际应用情况,构建了一套远程控制系统,该系统实现了对掘进机动作的操作与控制和状态监控。如图4所示,为地面控制中心控制系统的登录界面,软件的具体编程过程由专业团队合作完成,在此不再赘述。

图4 控制系统登录界面
本掘进机远程控制系统被应用于实际巷道掘进之中,并对控制系统的性能进行了测试验证,测试结果显示控制系统对掘进机状态的视频监控、掘进机动作的控制效果良好,极大地提高了掘进机的工作效率,同时提高了操作人员工作环境的安全性。
6 结论
本套掘进机远程控制系统已经被应用于实践,后期对该控制系统进行了跟踪测试,测试结果显示控制系统具有较高的可靠性、安全性,可实现远程对掘进机的控制,对于提升掘进机工作效率具有重要意义。
