机械臂球铰锁紧结构设计与预紧力分析
2021-06-02钟志豪崔建昆吕嗣孝
钟志豪,崔建昆,吕嗣孝
(200093上海市 上海理工大学 机械工程学院)
0 引言
机械臂在运动时常常需要保持指定的位姿,其关节必须在指定的位置锁紧,因此,机械臂关节锁紧是机械臂设计中尤为重要的一环。北航机器人研究所主要采用了2种机械臂关节锁紧结构:一种是利用电磁离合器,将其安装在各个关节处,通过离合器通断电后的闭合实现锁紧,但其初始成本过大,且后期维护难度也相对较大;另一种是机械锁紧,弹簧在关节外拉紧摩擦片,使得外圈抱紧摩擦片从而实现锁紧,但摩擦片长期使用后,摩擦系数越来越小,终将导致锁紧能力下降[1]。
北京石油化工学院郭丽峰[2]等设计了一种球铰快速锁紧装置,该结构是利用电磁铁通断电使得锁紧推杆推动锁紧盘,松放球铰内球体实现锁紧,但此方法维修比较困难;潘保安[3]设计了一种可调节锁紧力的液压锁紧缸,但其需要额外的液压源,同时,还存在泄漏的问题;苏州大学匡绍龙[4]等设计了一种被动机械臂关节锁紧机构,通过螺纹轴套与刹车盘片互相抵紧实现锁紧,但其刹车盘片和上述摩擦片相似,长期使用会使摩擦系数变小,导致锁紧能力下降。
针对上述锁紧机构存在的问题,本文设计了一种气压驱动的球铰锁紧机构,并对其中的碟形弹簧进行预紧力分析计算。球铰结构较其他结构有更快的锁紧速度,采用气压锁紧虽然难以伺服控制,但能提供较大锁紧力,且高压气体源可以经过压缩后储存在很小的容器中,可降低机械臂整体体积。
1 球铰锁紧结构设计
球铰锁紧结构主要由锁紧机构、解锁机构、预紧机构、高压气缸、单向阀等组成,如图1所示。在平常状态下,球铰被弹簧施加的预紧力压紧锁死,需要解锁时由高压气推动活塞释放球头。本次采用的是碟形弹簧,它能在小变形量内对球头提供较大的预紧力。锁紧机构为球铰提供正压力使其锁紧;解锁机构利用气缸活塞受到高压气推挤产生位移,导致球窝脱离球头从而解锁;预紧机构用于在安装过程中挤压碟形弹簧从而调节机构预紧力,而4个单向阀分别控制左右臂高压气缸的进气排气。
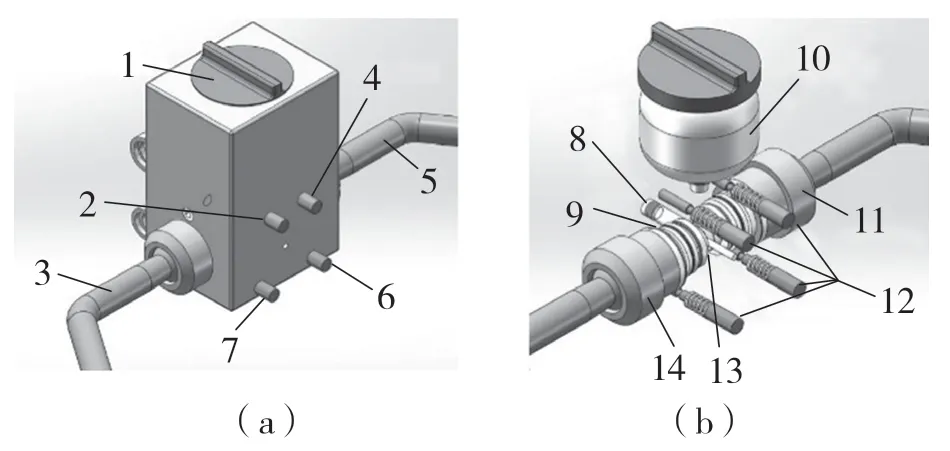
图1 关节锁紧结构三维图Fig.1 Three-dimensional diagram of joint locking structure
如图2所示,控制过程如下:左解锁阀处于闭合状态,高压气体无法进入气缸,左侧球碗受弹簧预紧力压紧球头,右解锁阀打开高压气体进入气缸中,推动活塞向左运动,球碗脱离球头,对球头的压紧力消失,球头可自由活动;左锁紧阀被按下,左侧气压缸与外界大气相通,活塞受左侧碟形弹簧预紧力作用将球碗压紧在球头上,右锁紧阀闭合,高压气体被密封在右侧气缸中,在不考虑气体泄漏的情况下,右侧活塞持续受高压气体推力,球头处于解锁状态。
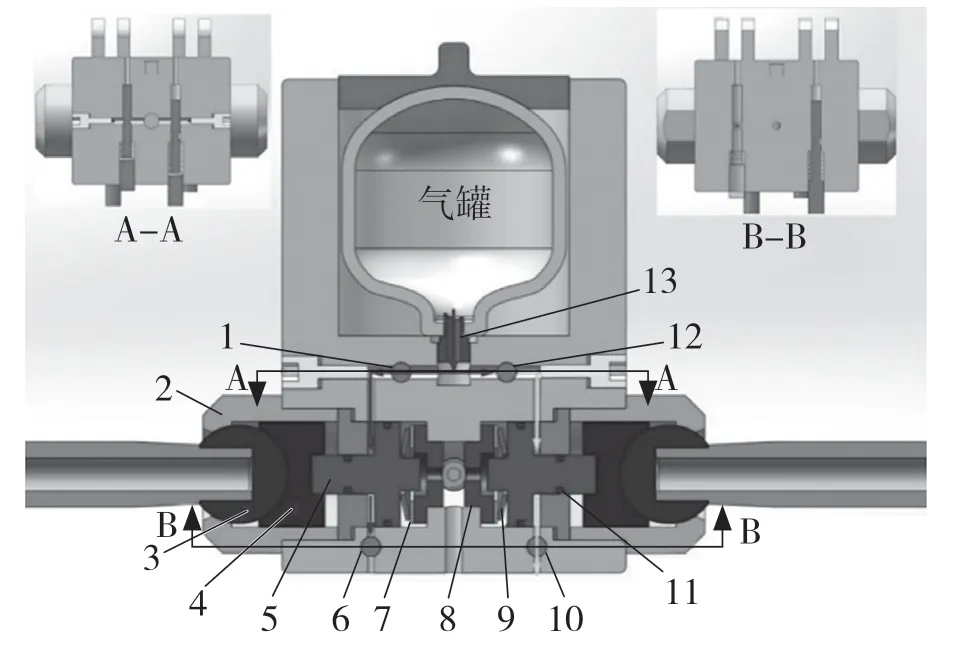
图2 单向阀控制图Fig.2 Control diagram of one-way valve
2 关节预紧力计算
球铰具有3个自由度,小臂受扭矩、拉力、压力作用时,可分为在空间3个平面的受力。小臂在水平面上所受扭矩最大,要保证小臂锁死,则球碗、球盖对球头的摩擦扭矩必须大于水平面内所受最大扭矩。球碗、球盖、球头三者在接触时会发生弹性变形,其横截面如图3所示,球碗受到力F向上运动。

图3 球头受力形变图Fig.3 Deformation of ball head under force
因球碗不可能为刚体,三者属于柔性体非线性接触,其形变量与柔性体形状、材料、厚度等有关,要精确计算出球铰锁紧时的摩擦扭矩非常困难,采用近似求解方法也能满足要求,为了计算方便引入下列假设:
(1)假设球面处的应力密度q按余弦分布

式中:q0——球窝球面最高象限点的接触应力;β——球面任意一点的圆心半角。
(2)整个球面润滑情况相同,即摩擦系数处处相同。
(3)球碗球头完全贴合。
(4)不考虑球面半径偏差。
以上述假设为前提,球碗球窝受力简图如图4所示。

图4 球碗球头受力简图Fig 4 Schematic diagram of ball bowl head force
图4中:α——球窝球面最大张角;R——球面半径;O——球心点;B——球面上任意一点;F——球窝所受的推力。
球碗上任意一点B处产生摩擦力f,摩擦力的方向为B点的切面与通过B点垂直于z轴且平行于xoy的平面。采用球面坐标表示B点[5],则球碗上任意一点B的微面积

球面上任意一点微面积上的正压力

沿z轴方向力的合力:

由式(4)可得

则球面上任意一点处应力:

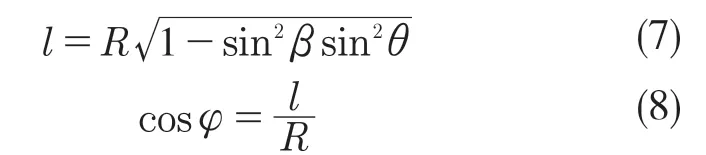
图5是任意一点B的空间关系简图。图中的l为B点到z轴的垂直距离。

图5 B点空间关系简图Fig.5 Schematic diagram of spatial relationship of Point B
由几何关系可知
球顶接触面间的摩擦力f对z轴的摩擦力矩

球头所受摩擦力由2部分组成,一部分来自于球碗,一部分来自于球头。根据式(9)可得,球碗对球头的摩擦力

球盖与球头的接触区是一条球带,同理可求得球盖对球头的摩擦力矩

球碗、球盖对球头的锁紧力矩必须大于小臂所受最大扭矩M,即

三者接触时形成的摩擦力为静摩擦。为提高安全性,增大接触表面摩擦系数,球碗、球盖、球头表面喷涂防滑涂料。采用非晶态铁基金属材料,例如 SAM2X5,SAM7,具有优异的耐磨耐腐蚀性能,能够满足严苛的使用环境要求[6],其摩擦系数为0.6~0.8。计算时取μ=0.8,α1=75°,α2=0,α3=85°,α4=45°,R=10 mm,M=15 N·m,代入(12)可求得

因此,碟形弹簧施加的预紧力只要能够大于1.326 kN即能够满足球铰锁紧需求。
3 结论
本文的气压驱动的机械臂关节球铰锁紧结构使用气压驱动可提供较大锁紧力,且气体压缩后可储存进小型容器中,可减小机械臂整体体积。采用碟形弹簧对关节处进行预紧力计算分析,在球碗、球盖、球头表面处喷涂防滑涂料,使其能在严苛的工作环境下工作。最后,计算出碟形弹簧需要施加1.326 kN的力才能满足球铰锁紧的需求。本文为后续碟形弹簧受力分析、预紧机构受力分析与结构设计以及关节锁紧力试验提供了参考。
