火炮后坐运动加速度自感知装置设计
2021-06-02邓泽洲王茂森戴劲松沈少宝
邓泽洲,王茂森,戴劲松,沈少宝
(南京理工大学 机械工程学院, 南京 210094)
近年来,武器“无人化”和“智能化”的发展需求不断提高。在装备无人化发展的过程中,如何适应信息技术、智能技术、控制技术的发展,并设计集攻击与防护能力于一身的“无人化兵器”,是部队发展的迫切需求以及夺取未来战争优势的必然要求。在无人机,巡航导弹,战斗机以及制导炸弹等近空突防武器的发展过程中,其雷达探测的等效面积越来越小,红外特征显著降低,而高射速火炮、便携式导弹以及弹炮一体防空系统等的近程防空武器,就成为了防空作战体系中的最后一道屏障。其中,中、小口径高射速火炮由于突出的防空能力,被广泛的运用到各种军事武器作战平台上[1-2]。
在中、小口径火炮无人化发展的中,有关火炮自感知方面的研究较为缺乏。针对火炮自感知的研究过程,本文设计一个基于惯性器件的嵌入式运动感知监控测量装置,通过测量火炮发射过程中炮管后坐的加速度,来判断发射的炮弹种类、数量,以及判断发射过程中是否出现问题,同时,该装置可成为火炮标配的一部分,能够完成火炮全寿命的检测,并为以后的研究、改进提供依据。
1 自感知采集存储系统设计
由于小口径火炮的可安装附加装置的空间较小,为满足多种小口径火炮的安装需求,需尽量减小该自感知装置的设计尺寸。为了实现上述目标,本研究将MEMS惯性传感器[3-6]、采集存储模块、电源和输入输出接口等集成到设计的壳体中。同时,为了满足火炮的高频率、高冲击的要求,在壳体中填入环氧树脂,对电路板和传感器进行灌封加固,使其满足火炮系统的振动和冲击要求[7]。
1.1 系统总体方案设计
本运动状态自感知装置,主要安装在小口径火炮的运动部件上,完成相关运动参数的采集,这里主要是加速度采集。采集完毕后使用专用的数据通讯接口读取采集的运动参数数据,然后使用上位机软件分析采集到的运动参数数据,来判断火炮发射过程中,发射的炮弹的数量和种类,并通过图像分析火炮发射过程中的各个阶段,区分准备状态、射击状态和结束状态等,进而判断火炮在射击过程中是否出现了肉眼无法分辨的故障。
本运动状态自感知装置主要通过火炮射击过程中身管轴线方向的加速度大小和波形来判断炮弹的种类和数量。当火炮发射过程中出现故障时会出现明显的抖动,身管轴向相互垂直的两个方向的加速度信号的采集可以辅助判断火炮发生故障,正常发射情况下这2个坐标轴的加速度变化不明显。
图1为使用仿真软件得到的小口径火炮的Z轴加速度曲线,通过分析,可以判断出火炮发射各个阶段,由于某型小口径火炮发射不同类型炮弹会产生明显的加速度幅值和波形的变化,这里通过分析加速度的波形和幅值来判断判断炮弹种类,同时可以通过分析波形的数量来判断发射数量[8-9]。
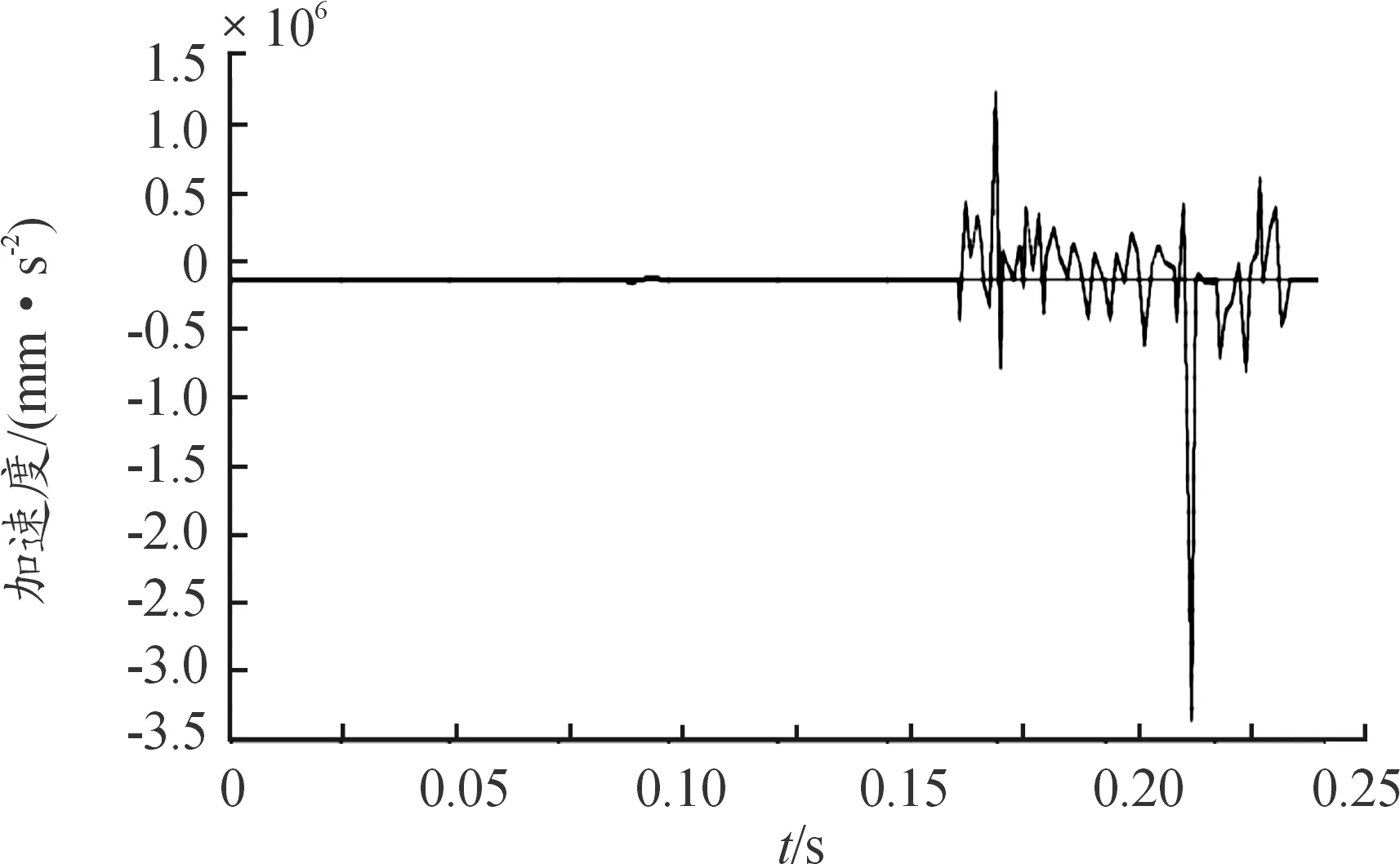
图1 Z轴加速度曲线
通过不断获取的实验数据,建立某型火炮不同弹药发射的数据库,并通过长期实验不断完成数据库,最后可以通过上位机分析采集到的数据可以自感知发射炮弹的数量和种类。
本运动状态自感知装置外形尺寸为40 mm×50 mm×80 mm,实物图如图2,该装置由MEMS传感器、信号调理电路、AD转换电路、FPGA、NAND FLASH存储电路、电源、通讯接口、高强度铝合金外壳组成[10-15],图3所示为其外形,有关原理框图如图4。
图2 运动状态自感知装置实物图

图3 运动状态自感知装置结构示意图

图4 运动状态自感知装置原理框图
1.2 硬件设计
1.2.1 惯性器件选型与信号调理电路设计
通过使用仿真软件对小口径火炮的运动学仿真,仿真结果如图1所示。该型火炮的后坐最大加速度为150g左右,其余均在50g范围内。弹体与机械结构发生碰撞的时候会产生高频加速度信号,幅度最大时在150g左右[16]。综合分析运动学分析的结果、传感器成本、传感器的测量精度等,并结合试验要求,对加速度计选型,部分性能参数值如表1所示。

表1 加速度计部分性能参数
该型号加速度计依据有关数据手册推荐,选择二阶RC低通滤波器来限制该款加速度计的带宽以满足测量0~10 kHz的振动的要求,其外围电路图如图5所示。
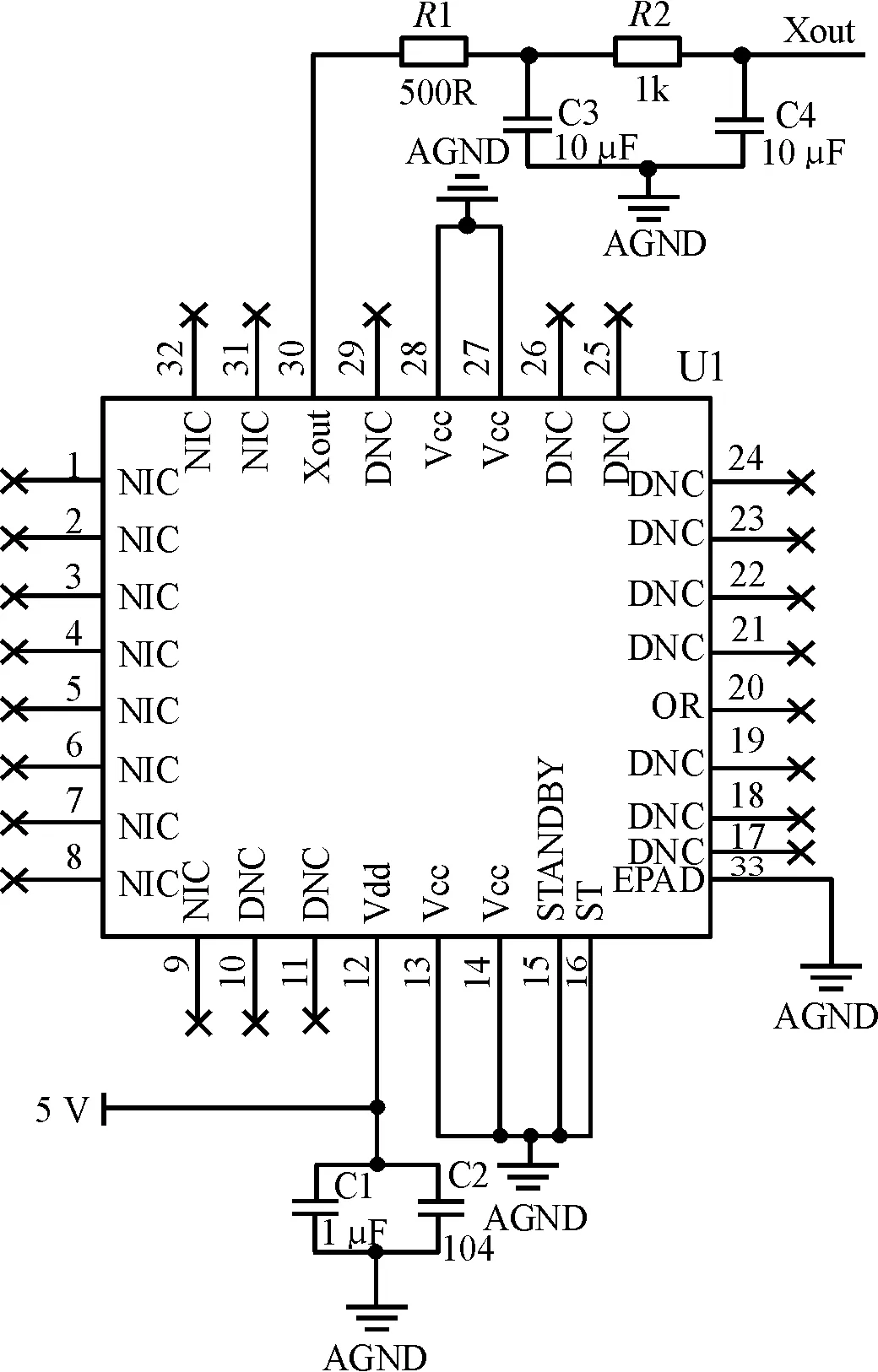
图5 加速度计外围电路图
1.2.2 数据采集与存储
根据采样定理,为了避免信号失真,采样频率fs必须要大于等于被测信号频率fm的2倍,一般取fs=(8~10)fm。根据传感器经过低通滤波后的信号最高频率为10 kHz,所以选取100 ksps的ADC采样速率可以满足要求。综合体积、功耗、成本等考虑,选择了某公司的16 bits、单通道、基准电压为5 V的ADC芯片。
本系统为记录火炮发射过程参数,考虑到小口径火炮单次极限发射时间在10 s以下。本文采用的采样频率为10 kHz,4通道16 bit AD并行采样60 s,产生的数据量为:
10 kHz×16 bit×4×60=38.4 Mbit
考虑到存储数位、价格、体积等因素,并为后续研究预留充足的冗余,这里选择了一款1 Gbit的NAND FLASH。
1.3 多通道采集存储程序设计
运动状态自感知装置的主要流程是MEMS加速度传感器采集加速度信号,然后通过信号调理电路产生初步处理的模拟信号,通过数模转换电路将模拟信号转换成数字信号,再通过FIFO存储到FLASH中。在数据读取时,通过上位机软件向FPGA发送数据采集信号,该装置通过串口协议将存储在FALSH中加速度数据[17]传输到上位机中,从而完成了加速度信号的采集、存储和读取等工作。在数据去完成后,使用上位机分析处理的数据,并与建立的数据数据库进行比较,得出分析结果,完成对小口径火炮射击参数的自感知。系统自感知工作流程如图6所示。
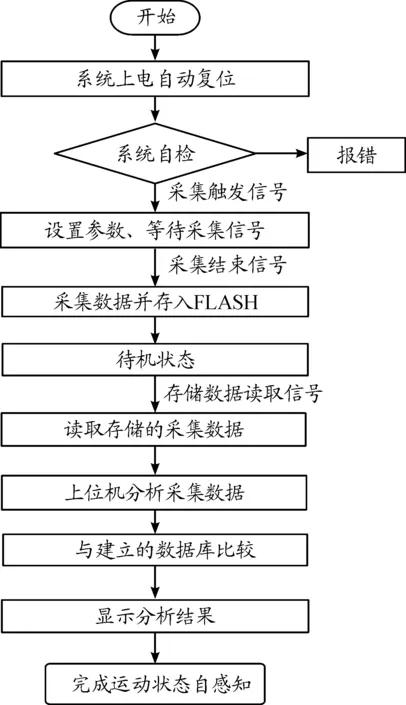
图6 运动状态自感知装置工作流程框图
2 试验验证及分析
结合前期相关研究试验的条件,分别对某型小口径火炮进行了单次和5连发发射数据采集。由于火炮发射过程中只有火炮发射发现会产生较明显的加速度,试验中实测火炮数据Z(t)为火炮平射过程中小口径火炮发射方向上的MEMS加速度传感器采集的加速度信号,某型小口径火炮的单次发射试验原始数据如图7所示。
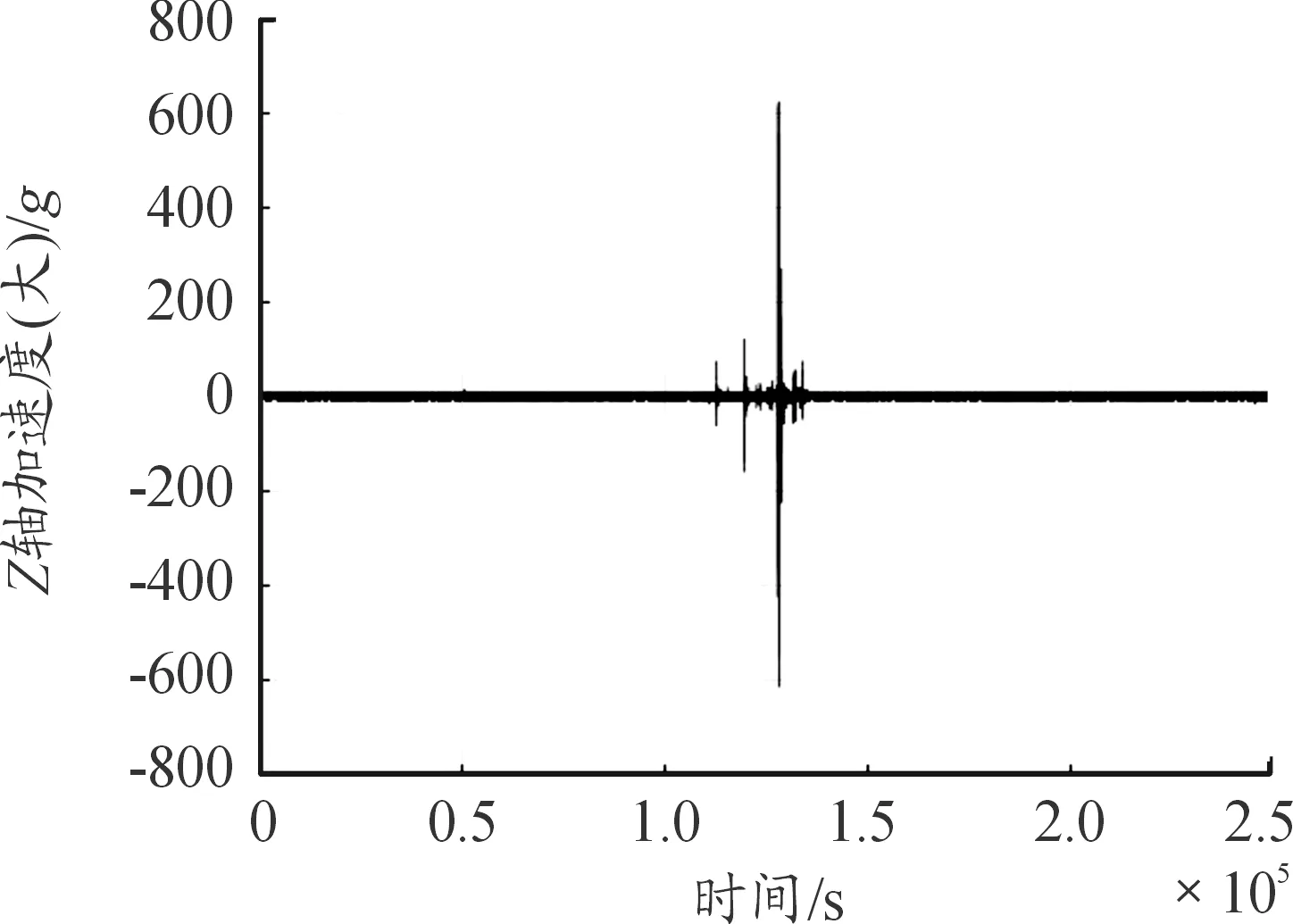
图7 测量原始数据曲线
因为采集的信号主要为低频信号,将对数据的高频部分进行滤波处理以及对噪声进行处理。将通过分析噪声的频谱图如图8所示,分析其噪声的频率范围,通常碰撞产生的频率在5 kHz以内信号的都认为是有效信号。但是当对传感器进行标定的时候发现,将1 kHz以上的数据进行滤波时,处理结果与标定时的标准传感器结果更为接近。

图8 噪声频谱
对采集原始数据进行滤波,然后选取需要时间段进行分析[18]。
某型小口径火炮的某次单发试验曲线如图9所示,每张图包含4个图像,依次为炮箱加速度原始曲线(左上)、加速度原始数据的噪声频谱分析(右上)、去噪处理后炮箱加速度曲线(左下)、处理后的局部炮箱加速度曲线(右下)。
某型小口径火炮的一次5连发试验分析如图10所示,每张图包含4个图像,依次为炮箱加速度原始曲线(左上)、加速度原始数据的噪声频谱分析(右上)、去噪处理后炮箱加速度曲线(左下)、处理后的局部炮箱加速度曲线(右下)。
通过分析图9可以发现,加速度值在炮射击时出现整个射击过程中的峰值,大概在120g左右,紧接着是由于火炮发射后坐力所带来的负向加速度,峰值在-50g上下波动。整体加速度测试数据与火炮发射的经验数据以及图1软件仿真数据吻合。由于火炮发射不同炮弹产生的加速度有很大的区别,这里可以通过波形和幅值判断炮弹的种类。通过分析图10,可以很清晰、简单地分辨火炮发射的数量为5发,且5连发射击过程中的单次波形与之前单发采集的波形吻合,符合设计要求。
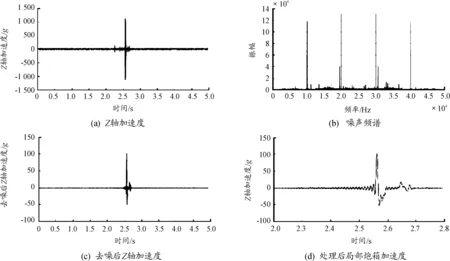
图9 火炮单发试验曲线
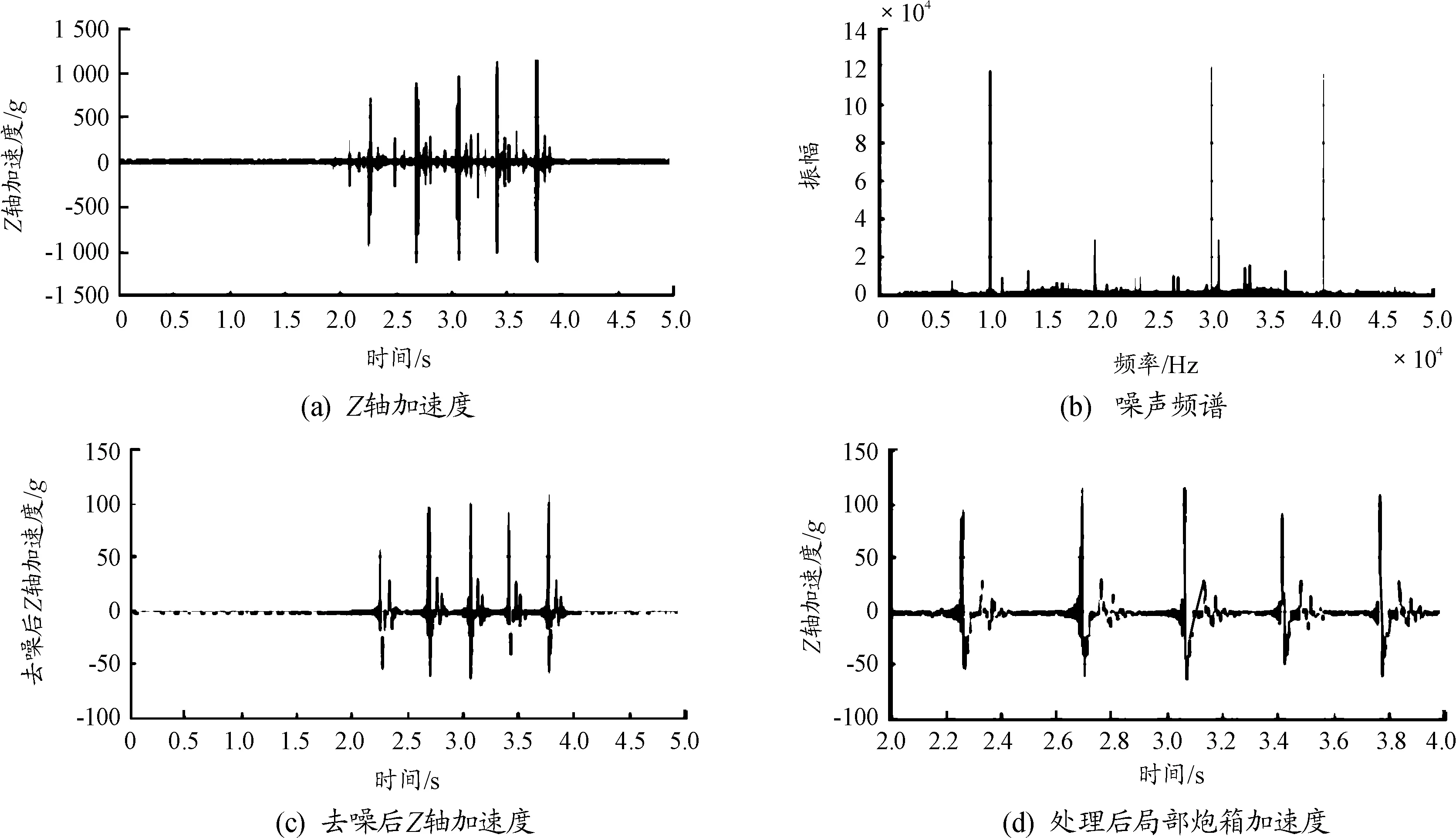
图10 火炮发五连发试验曲线
3 结论
1) 基于FPGA和MEMS传感器设计了一款火炮运动状态自感知装置,体积小、可装卸、精度高,并在靶场进行了多次单发射击试验和一次5连发射击试验,试验结果符合设计要求。
2) 通过不断的实验数据积累,逐渐建立火炮的发射数据库,通过采集数据与数据库进行比对可以完成对发射参数的自感知,对采集的数据分析可以为火炮的设计和改进提供重要参考。
3) 该装置使用有串口读取数据现象,读取数据速度一般,也未建立智能化的自感知诊断模型,这都是后期要努力主攻的方向。
