弹仓的RBF神经网络自适应滑模控制
2021-05-06王思杰李志刚孙玲庆
王思杰,李志刚,孙玲庆
(南京理工大学 机械工程学院, 南京 210094)
自动化弹仓是火炮系统的重要组成部分[1],包括弹筒、传动链节、传动链条、电机、减速器等等。其是否能够精准的运动到设定位置,将会对后续的弹丸协调臂能否顺利接弹造成影响,如果弹仓在工作状态下出现严重卡滞或运动超时等现象将会直接影响到整个系统的性能和可靠性。
自动化弹仓是一个复杂的动力学系统。其中弹筒通过链条和链节相互连接在一起,因此存在一定的冲击力矩和多边形效应。弹仓在转动过程中负载会发生较大变化,这就导致系统内的一些特定参数会随时间发生变化。另外系统外部还存在一定的扰动力矩,控制难度较大。对于这类参数不确定的系统,一般可以用智能算法结合滑模控制对系统的理想控制状态进行逼近,如模糊控制,神经网络控制等等。
滑模控制(Sliding Mode Control,SMC)又称变结构控制,多用于系统不确定、未建模动态影响较大的非线性系统的控制,对上述系统有较好的鲁棒性。因而能够广泛用于高性能伺服系统[2]。文献[3]中针对传统矢量控制方式永磁同步电机存在的在低速启动模式下电流及转速超调量过大等问题,提出了一种基于指数趋近率的滑模控制的矢量控制策略。结果稳态性能良好,负载转矩抗干扰能力比较强;电流控制效果良好,且在允许范围内逐步减弱至平衡态。仿真结果表明此方法能较好的控制转速。
模糊控制(fuzzy control)善于利用专家控制经验,对于非线性系统的控制显示了较好的鲁棒性和控制性能[4]。文献[5]中为了减小系统参数变化的影响,采用自适应算法估计系统参数,达到了理想的控制效果。
神经网络控制(Neural network control)属于先进控制方法,有模式分类、联想、记忆等基本特征,为不确定,非线性系统开辟了新的控制途径,有效保证了系统的动态和静态性能[6]。其中RBF网络是对连续函数的最佳逼近。文献[7]中设计了一种RBF神经网络自适应鲁棒滑模控制方法,对系统参数的大范围变化以及不稳定扰动不敏感,仿真证明该算法的控制精度和学习性能较好。文献[8]中通过RBF神经网络逼近控制电流与系统输出压力的关系,简化了电液伺服系统的数学模型,克服了参数的时变性。文献[9]中用神经网络作为控制器,逼近各种未知非线性扰动,提高了机器人轨迹跟踪控制性能。文献[10]中在卧式链传动药仓采用RBF神经网络和自适应算法估计系统参数,并引入鲁棒项,削弱了系统抖振。
1 弹仓动力学模型
采用永磁同步电机驱动自动化弹仓,使其在力矩控制模式下通过减速器带动传动轮等中间机构使弹筒和弹筒中的弹丸一起运动,为了后续研究,本文采用矢量控制方法,令id=0,忽略电流环,得到弹仓系统的动力学方程:
(1)

假定期望轨迹为θd,输入力矩u,所设计的无模型控制器要在其有界的情况下,精确的跟踪θd,使两者的误差e尽可能小。
2 控制器设计
现定义位置跟踪误差为
e=θ-θd
(2)
取如下积分型滑模面:
(3)

(4)
由式(4),当t→∞,e→0,并且λ可调整其动态品质。在理想状态下,式(1)中J和B均已知,且Td=0,将式(1)和式(2)代入式(4)可得理想控制律:
(5)

(6)
为了消除滑模控制中切换项所带来的抖振,本研究拟采用神经网络滑模控制器,利用神经网络的万能逼近特性[11]逼近滑模控制中的切换项,从而避免抖振。根据上述原理,设计网络算法

(7)
u2=WTh(x)+ε
(8)
其中:x为网络输入;cj和bj为高斯基函数的参数;j为网络隐含层第j个节点;h=[hj]T>0,为网络的高斯基函数输出;W为神经网络的理想权值;ε为网络的逼近误差。


(9)

为了克服神经网络的逼近误差ε,可在控制律中加入鲁棒项:
u3=-ηs
(10)
其中,η为鲁棒项中的系数。
因此,总的控制律可写作:
(11)
定义如下正定Lyapunov函数:
(12)
现对式(12)求导,并将式(1)、式(4)、式(11)代入式(12)可得:

(13)
现定义如下自适应律来在线估计相应参数的值:

(14)
其中,m1、m2为待设计参数。
根据式(13)对控制律进行调整,令:
(15)
并将式(14)和式(15)代入式(13),此时式(13)为:
(16)
现定义如下自适应律在线估计相应参数的值:
(17)
其中,m3为自适应参数。
将式(17)代入式(16)可得:
(18)
如果WT满足:
(19)
现定义满足上述条件的最小值为,则
(20)
其中,α>0,为一个极小的数。
通过调整式(17)的参数以及神经网络算法中的参数,可以逼近。
为了防止自适应参数在调整过程中发生漂移,定义如下投影算法:

(21)

(22)

综上所述,当采用如下控制律:
(23)

3 仿真分析与验证
由于本文的自动化弹仓中弹的数量较多,在工作过程中弹的数量会随时间不断变化,导致系统内的参数也会不断变化。因此本文仅在空载,半载,满载3种情况下进行仿真验证。如果本文设计的算法在这3种情况下都能达到较好的控制效果,则在其他情况下也同样适用。
本文拟采用点到点(Point-to-Point)的运动轨迹,电机转子先加速运动,1.5 s后匀速,3 s后减速,3.5 s后角位移达到最大值600 rad,如图1所示。

图1 期望轨迹
可见电机转子期望角位移的一二阶导数均为平滑曲线且有界。

表1 弹仓模型参数
仿真结果如图2~图8所示,图2为控制器的控制输入,其在外部扰动加载后的短时间内控制量迅速增加,可见在负载大范围变化时,控制器能够面向扰动进行自适应调整,来克服扰动。图3为控制器在3种情况下的跟踪误差,可见3种情况下误差的变化几乎相同,其在外部扰动加载前几乎为0,当加载外部扰动后,在极短的时间内,误差有所增加,但保持在可接受范围之内,之后也始终保持在-10-4~10-4rad之内。
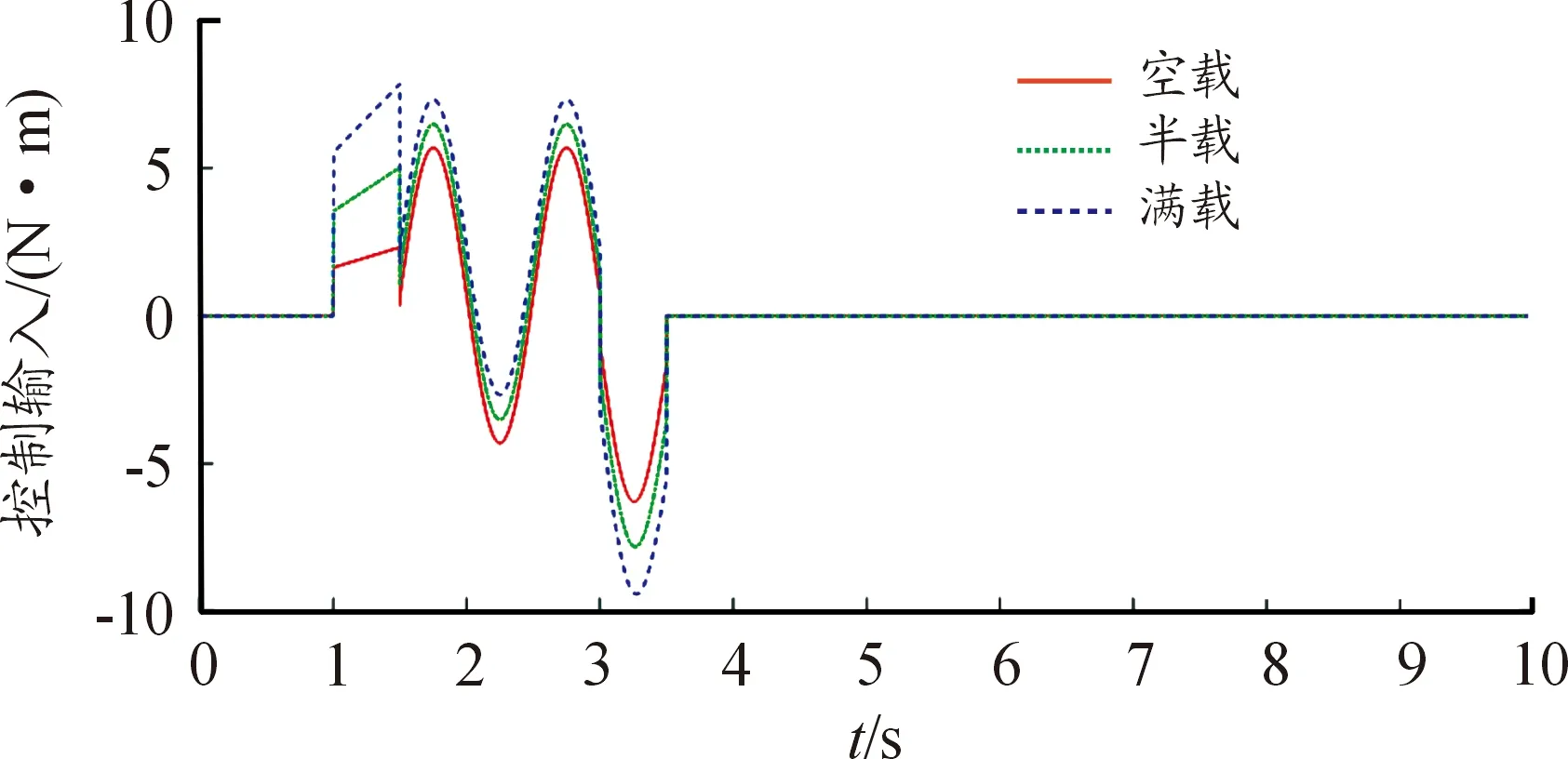
图2 控制器输入曲线
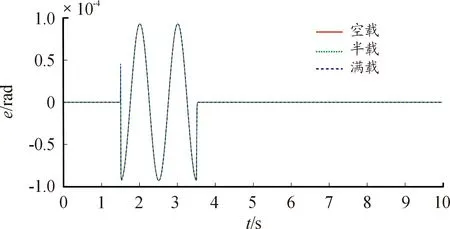
图3 跟踪误差曲线
图4为3种情况下系统等效转动惯量的估计误差,是随系统变化的跟踪量,只需保证其有界即可。可以看出在3种情况下,控制器可以根据弹仓参数的变化进行自适应调整,从而逼近理想控制律,3种情况下系统等效转动惯量的估计误差均有界,所以等效转动惯量的估计值有界,从而保证了系统的稳定。

图4 J的估计误差曲线
图5为3种情况下系统内等效黏性阻尼的估计误差,同上,系统内等效黏性阻尼的估计误差有界,等效黏性阻尼的估计值有界,保证了系统的稳定。图6~图8为3种情况下神经网络权值的估计值,会根据扰动的变化自适应调节自身大小,进而改变控制量的大小,可以看出估计值有界,保证了系统的稳定。

图5 B的估计误差曲线

图6 空载时W的估计值曲线

图7 半载时W的估计值曲线

图8 满载时W的估计值曲线
以上仿真说明,本研究采用的RBF神经网络自适应滑模控制算法能在负载大范围变化的情况下较快地适应参数变化,采用的神经网络无模型控制器也很好地削弱了抖振。
4 结论
本文提出了一种RBF神经网络自适应滑模算法,通过自适应律调整系统中的相关参数,较好地逼近了理想控制律。再通过神经网络的万能逼近特性逼近滑模控制中的切换项,简化了控制器的设计,削弱了系统抖振。最后通过在空载、半载和满载3种情况下的仿真分析证实,本文提出的算法能够较好地适应系统参数的变化,并且对外部扰动不敏感,控制精度较高。
