基于复合控制的发电机组协调控制方法研究
2021-05-06刘春光徐浩轩马晓军
刘春光,徐浩轩,马晓军
(陆军装甲兵学院, 北京 100072)
近年来,越来越多的军用车辆和重型车辆开始采用串联式混合动力系统,作为串联式混合动力系统主动力源的发动机-发电机组的协调控制问题也日益凸显[1]。由于发动机调速的动态响应时间较长,在车辆突加重载过程中容易造成机组转速剧烈振荡甚至可能因此而熄火。工程上一般采用限制发电机电磁转矩的方法协调发动机调速[2],但同时增大了系统动态调节时间,并限制了机组的输出能力,进而影响了车载电源系统的发电质量,并没有从根本上解决发动机-发电机组的协调控制难题。
传统的发动机-发电机组控制策略一般通过发动机转速闭环控制调节发动机喷油量进而控制机组转速[3],发电功率输出可通过控制发电机电磁转矩来实现。这种控制策略下的发动机-发电机组在并网发电时对负载波动响应速度很快,但并不适用于混合动力电传动车辆这种要求机组转速频繁变化的车载工况。为解决这一问题,文献[4]采用滑模控制加快了发动机的响应速度,但发动机的燃油等延时过程难以消除。文献[5]为发动机与发电机之间加入了机械传动装置以协调其外特性,不适于同轴机组的调节。文献[6]通过设计模糊规则对现有的电磁转矩限幅策略进行了改进,能够保护机组调速过程较为平顺,但制订模糊规则依赖经验,对于不同型号和出力的发动机-发电机组不具备普适性。
本文从发动机-发电机组系统角度出发,提出了一种基于复合控制策略的发电机功率跟随控制策略。通过调节发动机进油量控制机组输出功率,转速则由发电机控制器闭环控制,并针对动态过程中机组输出功率波动的问题设计前馈控制器,这种控制策略使功率跟随控制过程中转速的变化趋势与功率调节目标相一致,提高了机组动态过程的功率输出能力,实现了车载发电机组的高品质发电。通过对典型串联式车载综合电力系统的Matlab/Simulink仿真,验证了该控制策略的可行性。
1 车载发电机组协调控制策略
1.1 发电机组失稳机理分析
为提高串联式混合动力电传动车辆的经济性,混合动力电传动车辆的发动机内嵌功率-转速调节模块,发动机-发电机组通常需要根据目标功率和最佳功率-燃油特性曲线不断调整转速。但大功率负载冲击使发电机电磁转矩迅速上升,其幅值超过发动机输出的动力矩,造成机组转速振荡,甚至使发动机因堵转而熄火。
相比于传统车辆,混合动力电传动车辆的发动机调速控制更为困难。不仅是因为发动机与负载转矩之间缺乏机械传动装置的调节,更是由于混合动力电传动车辆通过预测负载需求功率进行功率分配,发动机无法进行预调节。混合动力电传动车辆的发电机组调速关系满足式(1),忽略其中粘滞阻力和摩擦力的作用,有:
(1)
式(1)中:T为发动机输出的动力矩;Te为发电机的电磁转矩;J为机组轴转动惯量;ω为轴角速度。由调速关系引入发动机自稳系数S为:
(2)
S越大,发动机转速调节过程中回到稳态的能力越强;S越小,回归稳态的能力越弱。由于发动机的喷气、燃油、摩擦等因素,∂T/∂ω常常较小。混合动力电传动装甲车辆的发动机负载转矩为发电机的电磁转矩。发电机功率跟随控制的控制策略下,电磁转矩根据负载功率需求响应非常迅速,这提高了对负载的响应能力,但当负载变化过快时,S<0,作为阻力矩的电磁转矩超过发动机输出的动力矩,机组失稳。
此外,车辆加载对机组转速的作用与转速调节目标相反也是阻碍调速的重要原因。考虑发动机在某稳态工作点附近时,将发动机的惯性常数等折算到发动机轴上,发动机转矩响应可以看作一个惯性加延迟环节,有:
(3)
发动机转速闭环控制模型如图1所示。
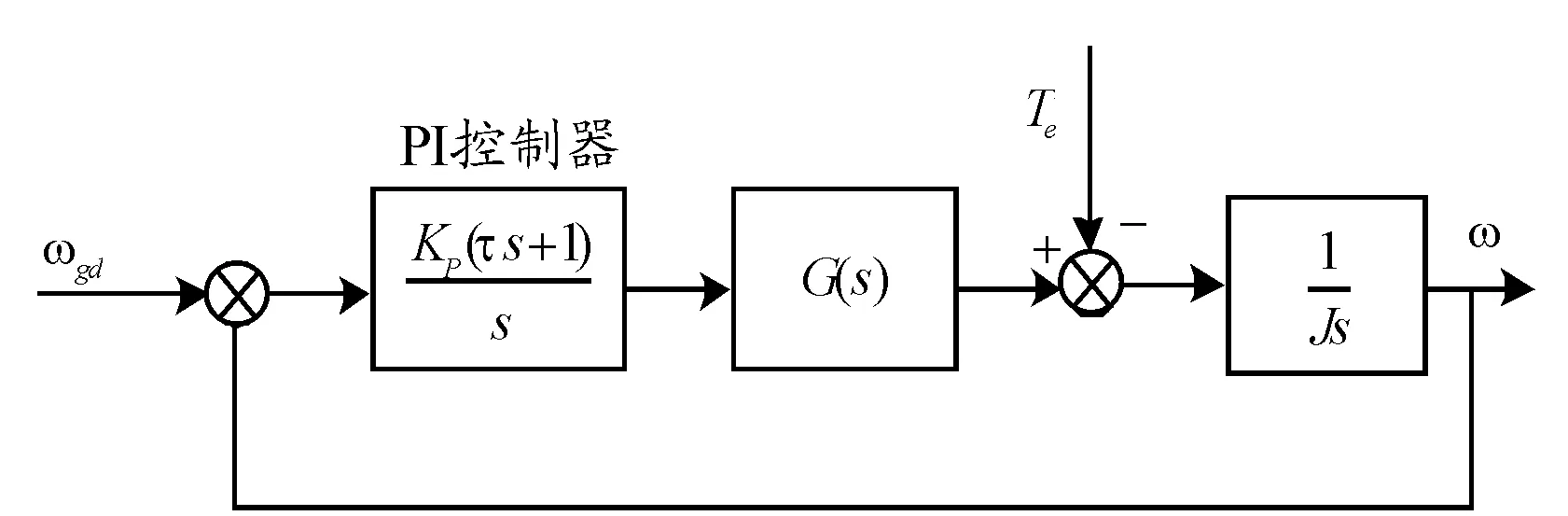
图1 发动机转速闭环控制模型示意图
发动机系统在发电机电磁转矩扰动下传递函数为:
(4)
机组目标输出功率阶跃变化过程对发动机的影响可以看作电磁转矩发生阶跃变化,即为Te(s)=Te/s,此时转速变化量为:
(5)
将各参数代入式(5)可知,机组功率跟随控制的过程中,发电机对机组转速的调节趋势与目标功率变化趋势相反,即目标输出功率增大时,转速有降低的趋势。但机组输出功率增大的过程同时也应该是转速上调的过程,机组输出功率降低对应的也是转速降低的过程。传统控制结构中发电机通过电磁转矩对轴转速的调节作用与转速的调节目标不一致。当发电机对转速的调节作用强于发动机对转速的调节作用时,转速出现振荡。
1.2 新型协调控制策略设计
通过对传统控制结构的分析,不难得出:要控制机组平顺调速,就需要抑制发电机电磁转矩的变化率或使发电机对轴转速的控制效果与机组功率变化过程中转速的调节目标一致。目前的机组协调控制策略均从限制电磁转矩变化率着手,增大了转速平顺调节的区间,但不能做到全功率变化范围的平顺调速。
本文将发动机-发电机组看作一个整体进行功率-转速双闭环控制,外环为功率环,由发动机控制器调节发动机进油量,实现机组的功率闭环控制;内环为速度环,由发电机控制器控制发电机组转速,并使发电机跟随发动机功率输出电功率。其中,发动机控制器接受上层控制器给出的功率期望值,以发电机实际输出功率为反馈值进行闭环;同时,通过查询发动机最佳燃油经济曲线,查表获取机组目标转速,由发电机控制器完成转速闭环控制。控制原理如图2所示。
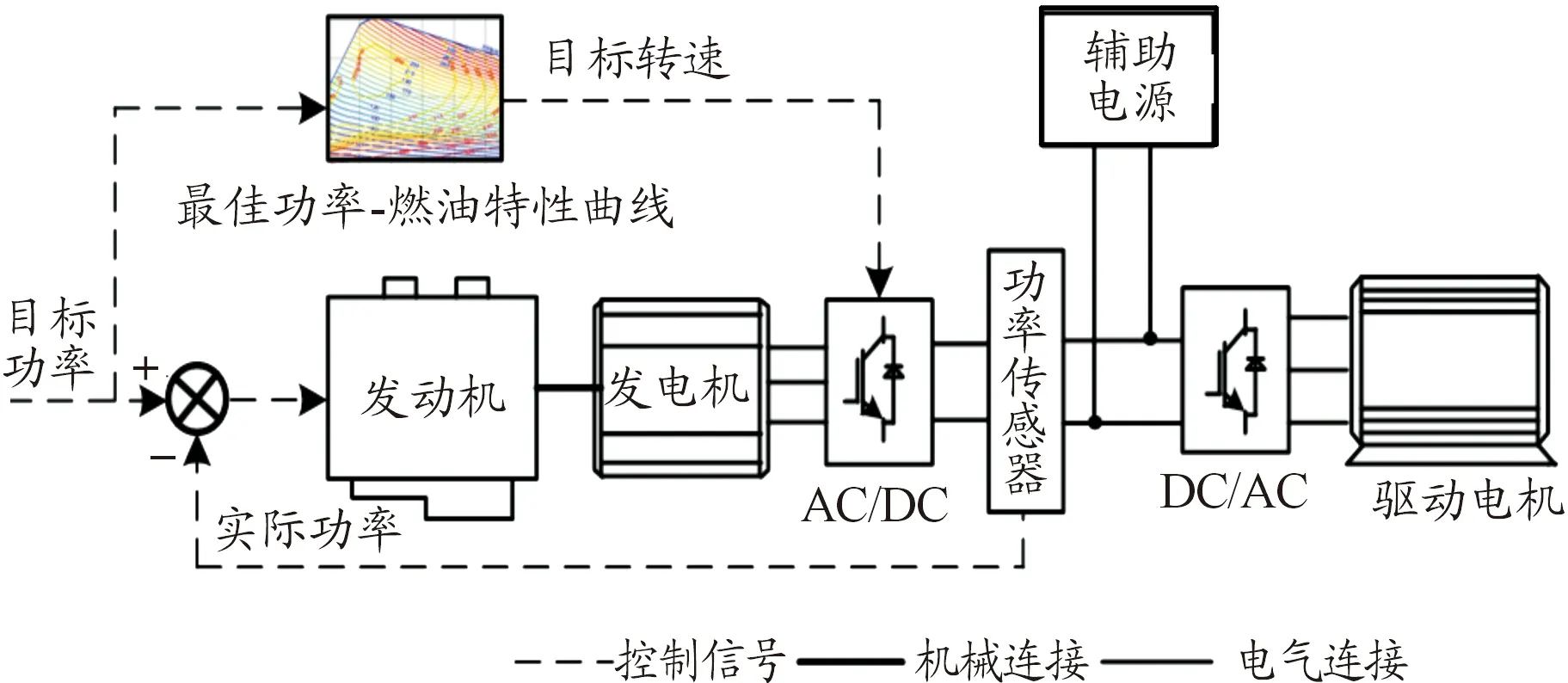
图2 新型控制策略控制原理示意图
采取该控制策略后,机组的转速由通过发动机调节改变为通过发电机调节。车载发电机一般选择永磁同步发电机,在两相旋转坐标系下的电压方程为:
(6)
式(6)中:ud、uq为d、q轴电压;id、iq为d、q轴电流;Ld、Lq为d、q轴电感;Rs为定子电阻;φm为永磁体磁链。
由式(6)可见,永磁同步电机是一个d、q轴存在耦合的复杂系统。为降低控制难度,现有的双闭环设计方法大多采用id=0的线性解耦策略,将其等效为他励直流电机进行控制,其双闭环控制动态结构示意图如图3。
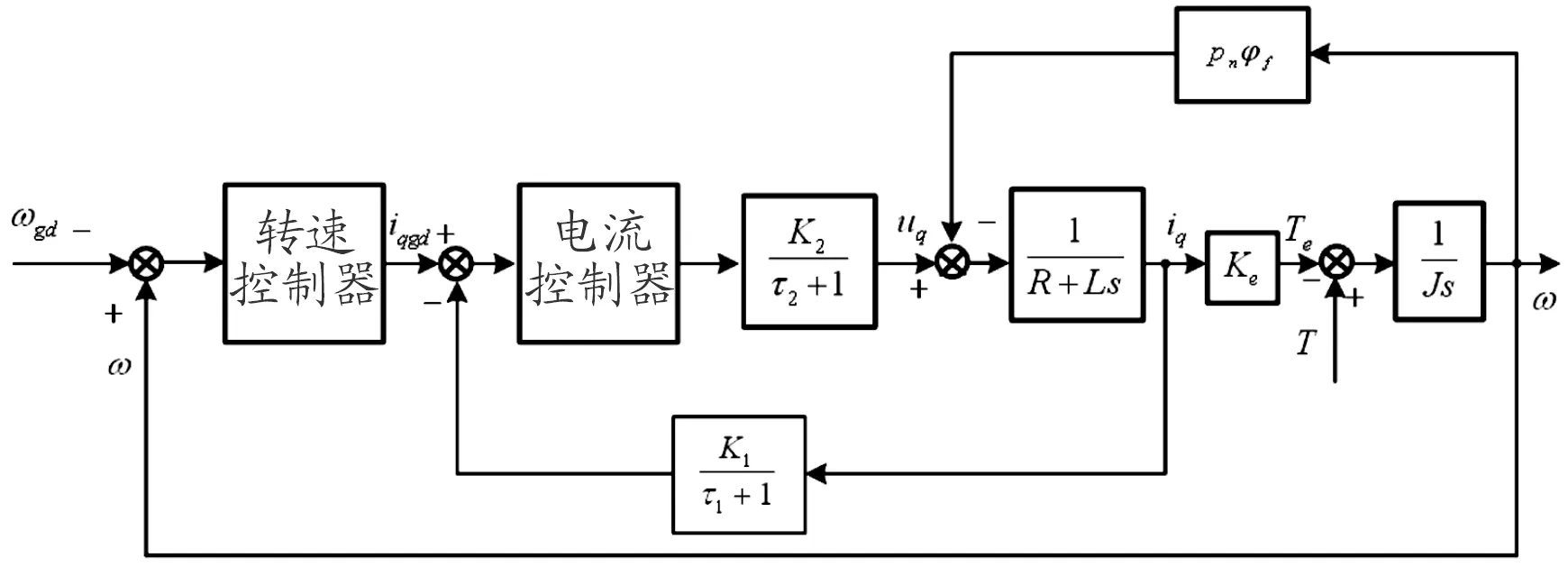
图3 双闭环控制动态结构示意图
图3中,Kω为速度环的比例系数,τω为速度环的积分系数,Ki为电流环的比例系数,τi为电流环的积分系数。K1/(τ1s+1) 代表增益为K1,滤波时间常数τ1的电流反馈滤波环节;K2/(τ2s+1)则表示存在增益K2,滞后时间常数τ2的三相PWM逆变器。L为等效电感,R为定子绕组电阻,P为极对数,Ke为转矩系数。
将电流反馈滤波环节和PWM逆变器均视为小惯性环节,结合图3所示的控制结构可知,电流环的控制对象开环传递函数为:
(7)
式(7)中:Ti为τ1+τ2,通过小惯性环节合并而来;KR为1/R,Tm为L/R。加入PI控制器后,电流环的闭环传递函数为:
(8)
电流环设计一般采取零极点对消的方式消去电流开环被控对象的时间常数,即取τi=Tm,此时式(8)上下对消零极点得:
(9)
式(9)中,T=τi/K1K2KRKi。由于速度环截止频率低且Ti为极小值,对式(9)进行处理得:
(10)
则其速度环控制对象可以表示为:
(11)
式(11)中,K=Ke/J。由此可得转速环带控制器的开环传递函数为:
(12)
此时,机组目标输出功率的阶跃响应通过发动机输出转矩T作用于转速闭环,设定输出转矩阶跃变化为T(s)=T/s,则转速变化为:
(13)
式(13)中,h(s)=s2(Ls+R)(1+1.5Ts)+sK(τ2s+1)。
由式(13)可见,新型结构中功率输出带来的转速响应与功率控制的变化趋势一致。发动机、发电机协同调速,避免了转速振荡的问题。
2 复合控制器设计
采用新型控制策略后,机组在车辆负载增加时,发电机优先进行转速调节,电磁转矩的调节速度相较发动机输出的动力矩调节更快,因此机组调速性能与抗负荷冲击能力得到极大改善。但机组目标功率因负载增加而上升时,虽然发动机输出功率持续增大,发电机输出功率由于电磁转矩的降低而降低,即在机组调速的动态过程中,机组输出功率会先向目标功率的反向变化再迅速回归目标值,这主要是因为发动机燃油、喷气等过程造成的延迟是不可消除的,电磁转矩为达到目标转速大幅降低。这种特性导致母线电能质量的下降,不利于车辆响应功率调节。为平衡调速与调功的关系,可以在调速过程中适当放缓调速,减小电磁转矩下降幅值,保证功率输出。
减缓转速调节可以通过加入微分环节,增大系统阻尼来实现,但一方面微分环节不利于工程实现,另一方面会增大系统的高频噪声[8]。因此,本文采用加入前馈控制的方式减小目标调节的偏差,使发电机可以维持部分输出功率,保证母线电能质量。复合控制原理如图4所示。

图4 复合控制原理示意图
图4中Q(s)为前馈环节。前馈环节对系统性能影响如图5所示,由图5可以看出,相对于前馈环节采用比例参数,采用积分环节对系统的带宽影响十分微弱。

图5 前馈环节对系统性能影响
因此,前馈环节采用比例控制器。值得一提的是,加入前馈环节并不改变系统闭环传递函数的特征方程,系统极点不变,因此不会影响系统的稳定性。
适当选择预期的转速和功率动态调节时间就可以通过目标转速的前馈放缓目标转速变化,为功率调节提供更多的时间,改善负调节特性和母线电能质量。同时,只有功率调节幅度超出机组跟踪能力时需要前馈控制,小幅度的调节过程进行前馈只会降低系统性能,因此,对前馈控制加入滞环保护环节,如图6所示。
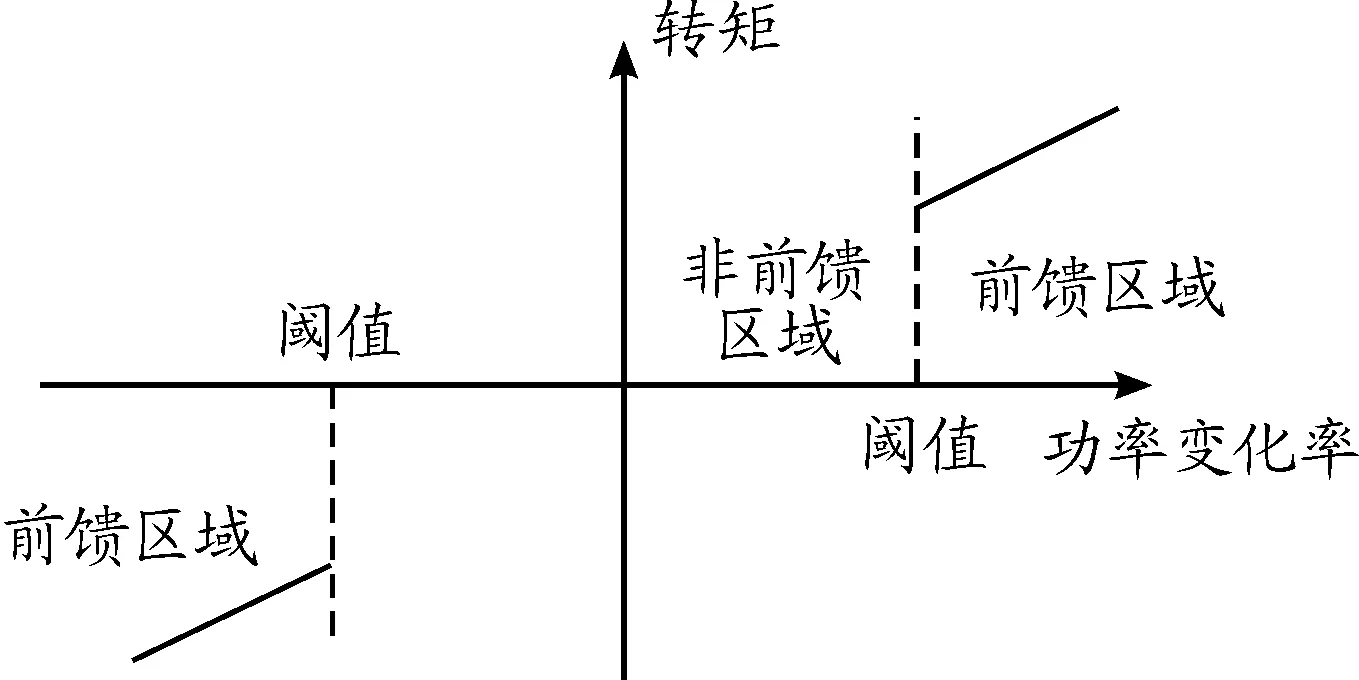
图6 滞环保护环节示意图
3 仿真验证
本文以某型采用发动机-发电机组、蓄电池和超级电容器联合供电的串联式混合动力电传动车辆参数为依据,首先根据基于RT-LAB的半实物仿真平台,验证发动机-发电机组在抗负荷冲击、转速调节及功率调节方面的有效性。仿真选定的器件参数及控制器设计参数如表1所示。
仿真中,发动机-发电机组采用功率跟随控制、蓄电池采用稳压控制,超级电容器直接挂接在母线上。选定母线电压稳态值为750 V,机组从0 s开始启动,目标功率为100 kW,在5 s时机组目标功率升至250 kW,转速调节能力仿真结果如图7所示,功率调节能力如图8所示。
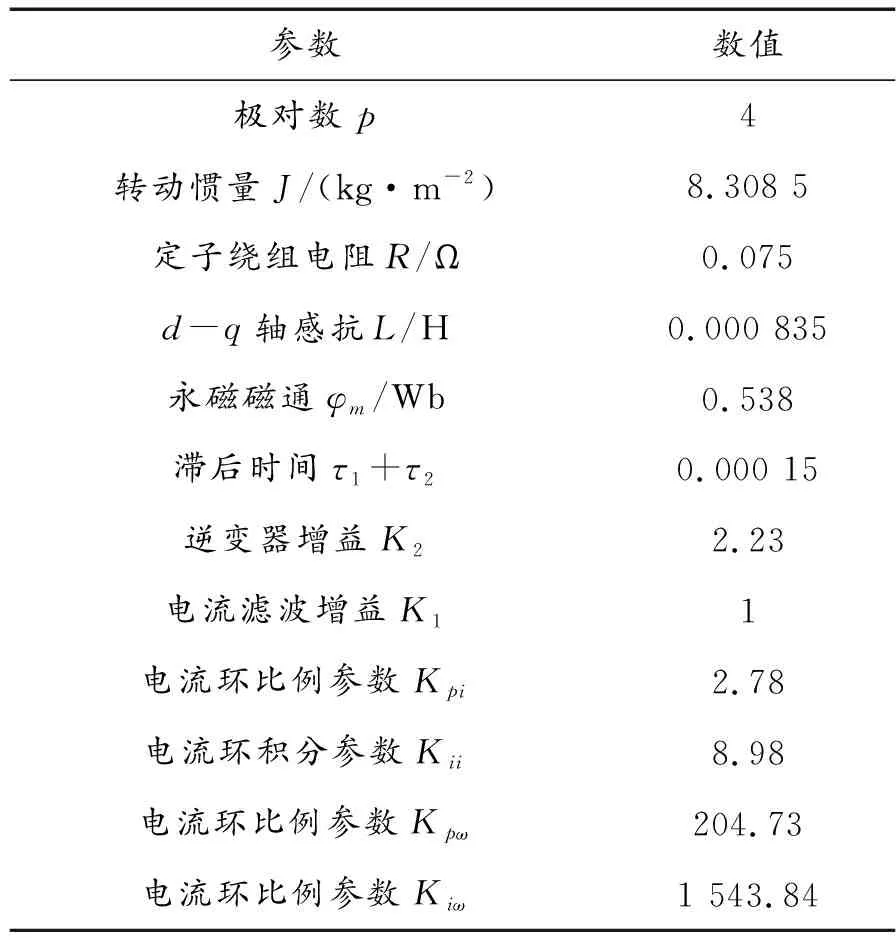
表1 设计参数
图7(a)中,机组始终维持转速给定1 700 r/min。传统控制策略下的机组在5s时突加阶跃负荷的冲击下转速先降低至1 500 r/min然后回升至给定转速,经过短时间的振荡在7.2 s左右趋于稳定;与传统控制策略相比,采取新型控制策略后,机组在突加负荷后转速有轻微的上升之后迅速维持给定值,与1.1节和1.2节的分析相一致。采用新型控制策略后避免了负荷冲击造成的转速振荡,保护机组不会因突加负荷导致熄火。
图7(b)中,机组在功率变换前后按照最佳功率-燃油特性进行调速。相比传统控制策略,采用新型控制策略后,机组的转速调节能力显著提升,跟踪目标转速的能力更强,机组可以工作在最佳功率-燃油特性曲线的附近,更利于降低油耗。

图7 不同控制策略下实验波形
图8为机组新型控制结构下采取前馈加反馈的复合控制策略与不加入前馈环节前后的功率调节能力对比。
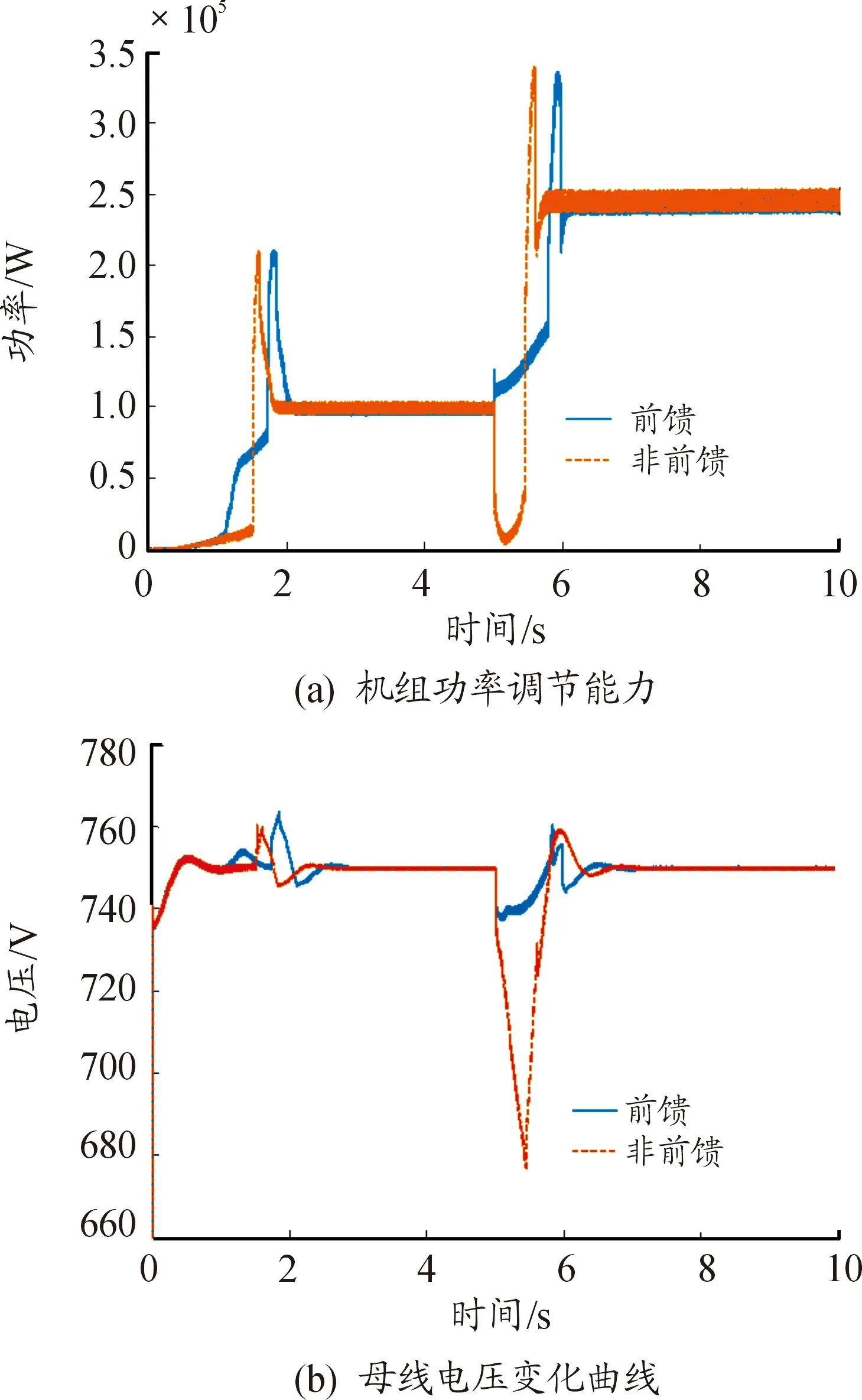
图8 加入前馈控制前后实验波形
如图8(a)所示,复合控制策略有效地 抑制了动态调节过程中功率的波动,虽然整体的调节时间较非前馈控制下的机组落后0.4 s左右,但保证了动态调节过程中的功率输出能力。如图8(b)所示,未采取前馈环节的车载母线由于功率的剧烈波动电压跌落至680 V以下,采取复合控制策略后,可以保证母线电压维持在目标值附近±10 V,保证了挂接在母线上的其他用电器的安全运行。
4 结论
串联式混合动力电传动车辆的发动机-发电机组在动态调节过程中容易因负载的冲击导致机组转速振荡。通过采用基于复合控制的新型控制策略,可以较好地提高转速调节能力,同时维持机组在动态调节过程中的功率输出,从而避免转速振荡、母线电压跌落。
