区域高程异常拟合的分区方案研究
2021-04-21廖俊州赵仁君
廖俊州 赵仁君
(海口市土地测绘院, 海南 海口 570100)
0 引言
高程异常拟合中经常出现某些拟合精度较低的控制点,因为少量点位精度不够导致整个区域高程异常拟合精度偏低的情况常有发生[1-4]。有关高程异常分区拟合已有一些较为成熟的成果:高伟等通过区域内高程异常值变化速度作为分区依据,将测区分为两个区域,取得了较好的拟合效果[5];王昶等在分区边界使用混合拟合模型获得了较好的边界平滑效果[6]。由于平面拟合模型的模型曲面平缓,使用此模型拟合获得的低精度控制点可以作为拟合中需要重点关注的控制点,通过加权分区分配低精度点的权重,在分区拟合中提高各分区拟合精度,达到精化区域似大地水准面的目的[7-12]。本文分析两个算例,使用多项式拟合法、最小二乘配置法、多面函数拟合法分别从小面积与大面积两个方面验证提出方案的可行性。
1 分区拟合方法
选取测区后,首先使用平面拟合法进行初步拟合处理,可以认为平面拟合法是多项式拟合法的一种特殊情形。在较小区域中似大地水准面是一个比较平坦的曲面,因此可以使用起伏平缓的平面拟合模型进行高程异常拟合。平面拟合模型表达式如下:
F(x,y)=a0+a1x+a2y+v
(1)
式中,ai为模型拟合参数,x为拟合点纵坐标,y为拟合点横坐标,v为残差。由于模型有3个参数,因此至少需要3个拟合点才能求解,当然拟合点超过3个时,可使用超定方程组求解待定系数。将式(1)改写为矩阵形式为:
F(x,y)=AX+v
(2)
再根据式(3)计算即可得参数矩阵B:
B=(XTX)-1XTξ
(3)
式中,ξ为拟合点已知高程异常值。
根据模型参数计算此区域控制点高程异常值中误差,对比残差值与中误差的大小,可得到大于中误差的残差点。通常情况下大于中误差的残差点不会太多,会集中在几个较大的点上,将此类点作为分区的依据,将分区分为以大于中误差的点为主一类与以小于中误差的点为主一类。以小于中误差的点为主的分区使用二次曲面模型进行拟合计算,以大于中误差的点为主的分区拟合时,需要在二次曲面模型的超定方程组解算式中加入权重,权重计算函数为:控制点拟合残差平方,即残差较大的点分配较大权重,以改进此类点在拟合中精度偏低的情况。加权解算式在式(3)基础上略有改动:
B=(XTPX)-1XTPξ
(4)
式中,P为控制点权重矩阵。区域间的边界重合点会出现多个拟合结果的情况,以多个结果的加权平均值为最终结果,权重计算函数为:该点中误差平方的倒数,即精度较高的值占有较高的权重。由于本文所用三种数学模型均能在已有文献中查阅,因此不再叙述模型解算过程,仅在各算例中介绍使用的模型参数。
2 测区概况一
2.1 实验一
实验一利用某区域测量成果,由于数据量较大,表1仅列举其中9组数据(总计45组已知点)。
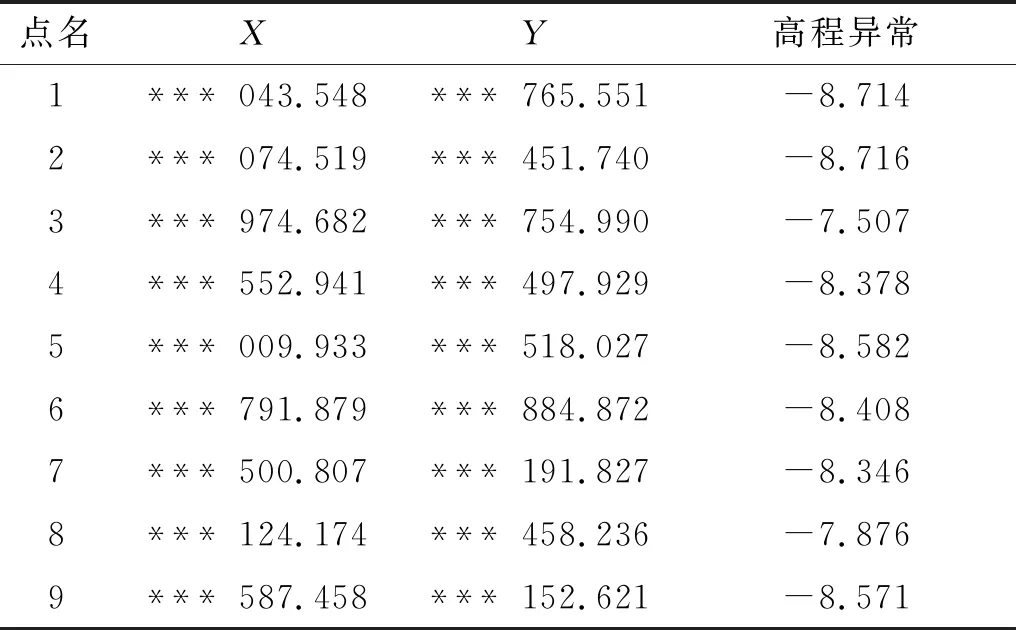
表1 实验一已知点的数据 单位:m
对数据进行平面拟合,得到拟合参数(-27.647、0.000 001 44、0.00 005),计算拟合中误差为0.034 m,确定了大于中误差的残差点有8、10、14、27、29、30、31、33、40、43、44,最大残差为31号点,为0.066 m。大于中误差的残差点根据实际情况进行分区处理,见图1。
如图1所示,分区一、分区二主要以小于中误差的点为主,分区三、分区四主要以大于中误差的点为主,产生了6个边界重合点:8、9、13、29、30、36,其中分区一共计25个点,分区二共计8个点,分区三共计6个点,分区四共计12个点。由于分区三、分区四主要以大于中误差的点为主,在此两分区中计算各点权重,使用式(4)解算拟合残差。
2.2 算例一
2.2.1模型参数
计算各分区多项式拟合参数如下:
分区一(-6 766.741、0.003 48、-0.000 418、7.641×10-11、-4.477×10-10、1.908×10-10)
分区二(89 178.783、-0.051 8、0.052 8、-1.391×10-8、7.425×10-9、1.955×10-9)
分区三(28 043.848、-0.013 9、-0.002 96、4.915×10-9、1.498×10-9、-1.792×10-8)
分区四(-38 956.746、0.028 1、-0.071、2.348×10-8、-4.924×10-9、-2.353×10-8)
本文最小二乘配置法计算使用已有程序,因此未列出相关系数,由于协方差通常需经过大量观测资料样本的统计计算才可得到,故在实际有限样本的应用中,一般采用平方根函数作为协方差函数。
(5)
多面函数平滑因子在各分区中取值分别为:230、260、1 100、580,模型待定系数见表2。
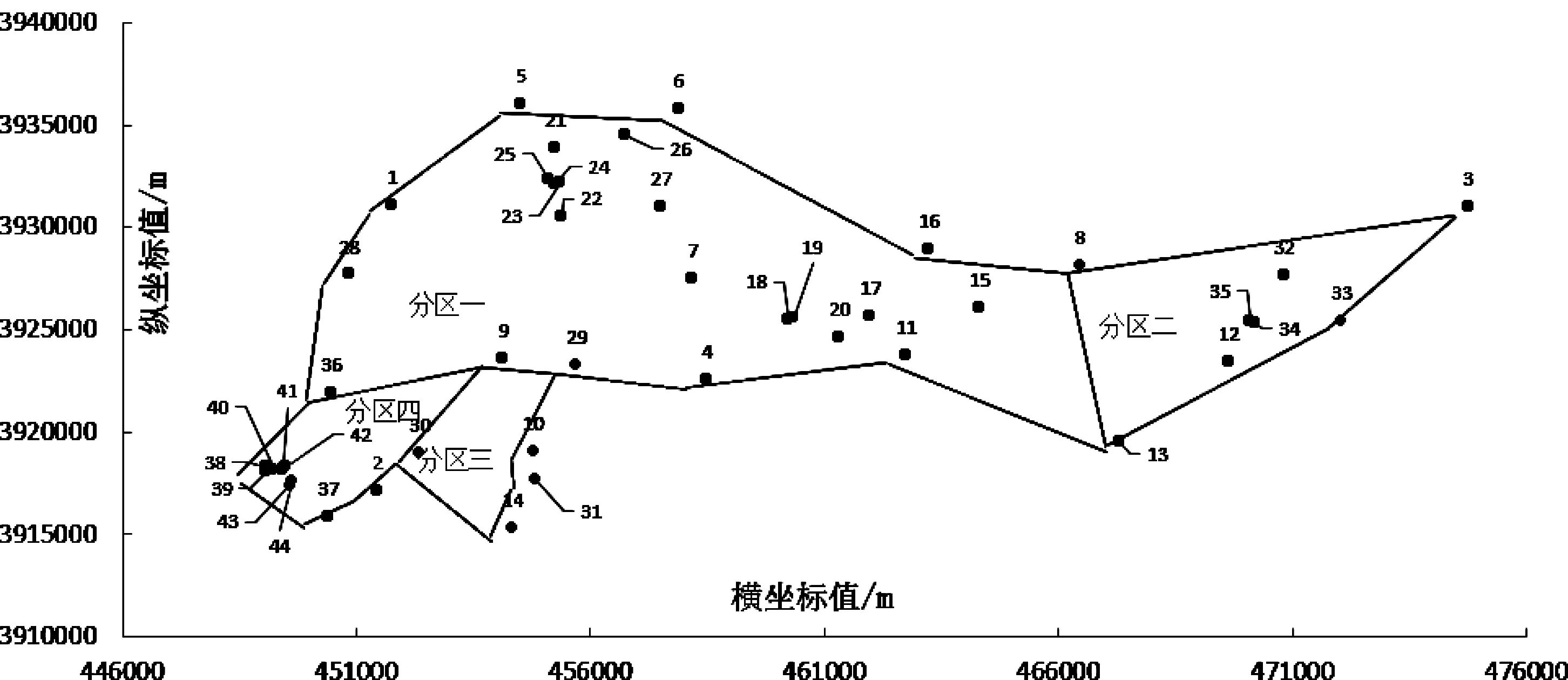
图1 分区图一
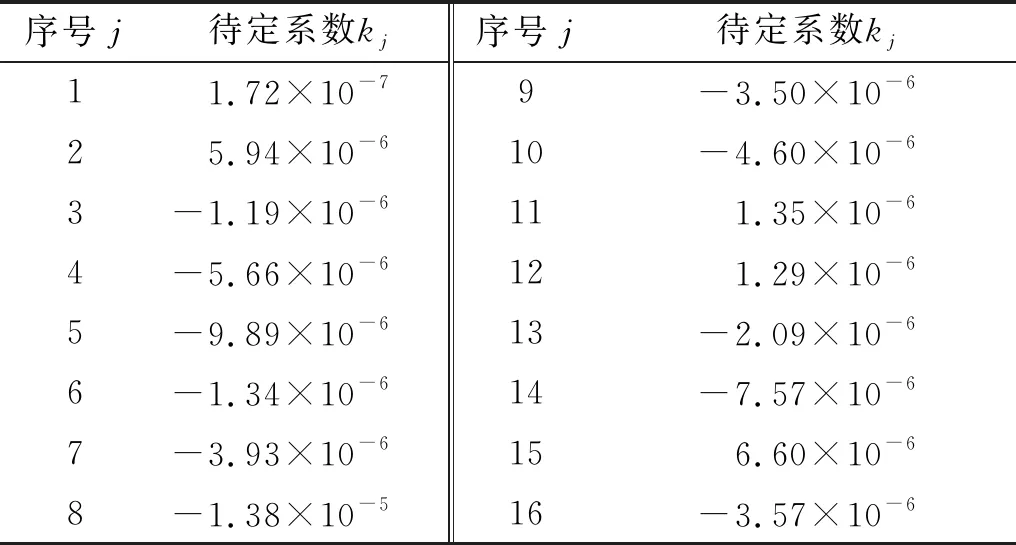
表2 多面函数待定系数
2.2.2残差分析
根据3种数学模型拟合残差,绘制分区残差曲线图,如图2所示。
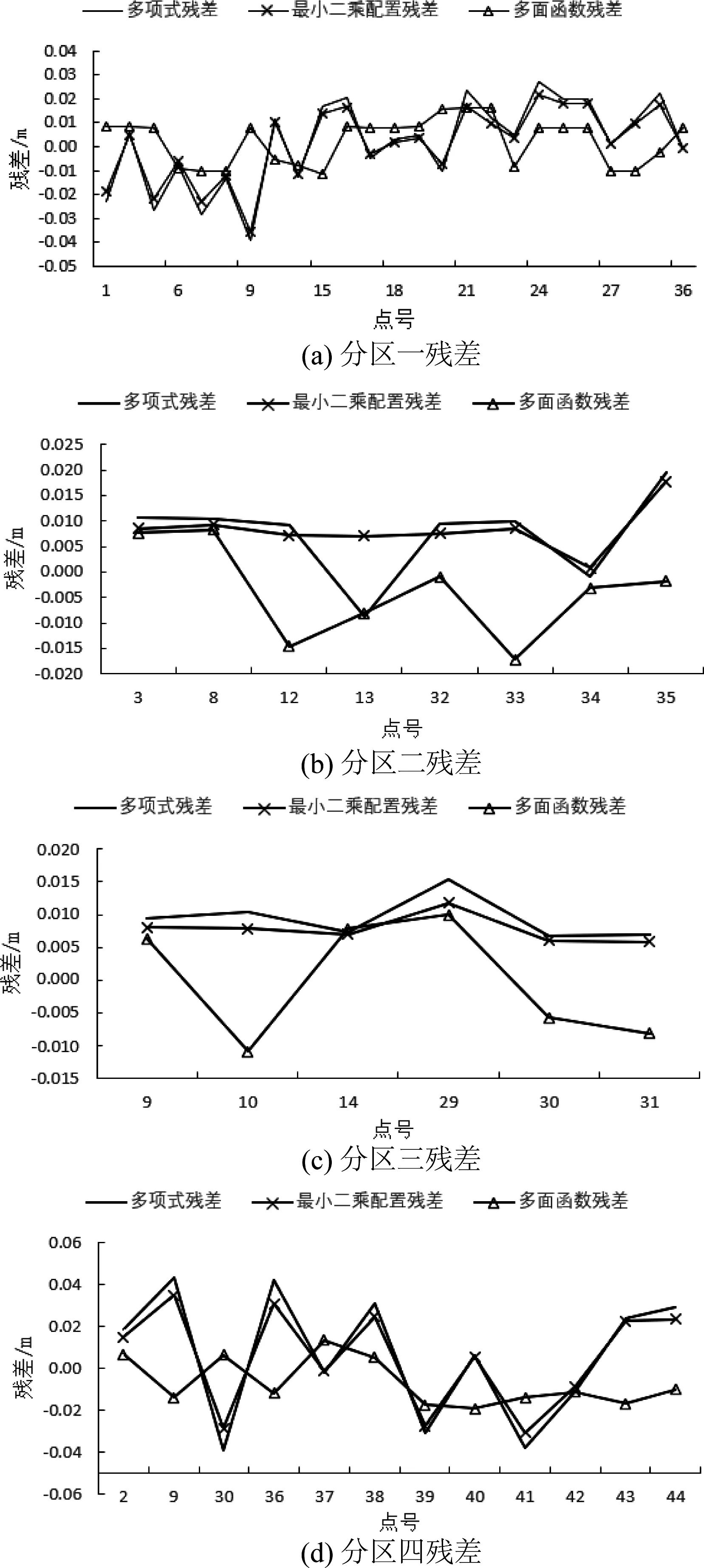
图2 实验一分区残差曲线图
分区拟合后可以看出,多项式拟合模型精度最低,最小二乘配置拟合结果与多项式拟合模型趋势一致。这是因为本文使用的最小二乘配置拟合是基于多项式拟合模型的,因此仅能在原有的多项式模型基础上进行一定程度的改进,由于协方差函数使用平方根函数代替导致拟合精度提升有限。分区一绝大多数点是大于中误差点组成,且分区面积较大,因此分区后精度提高比较有限;分区二虽然仅有两点为小于中误差点,但由于采用了加权计算且分区面积小,拟合效果依然很好;分区三多数为小于中误差点,分区拟合效果较好,残差很小;分区四分区后拟合残差依然较大,分析原因可能是该区域测点过于集中,导致整体拟合效果不好。四个分区3种方法拟合中误差如表3所示。
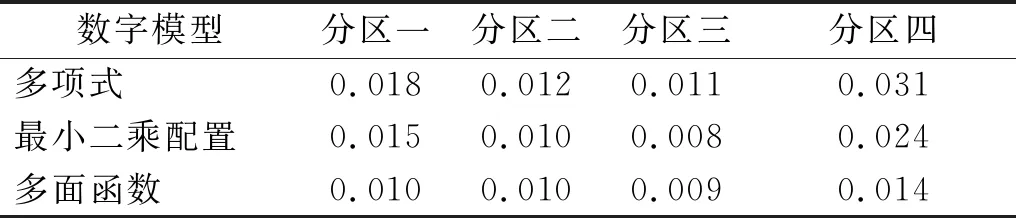
表3 四个分区的中误差 单位:m
由表2可知,最小二乘配置法相对多项式模型提升精度比较有限,多面函数模型相对最小二乘配置提升精度也比较有限,这是因为多面函数比较适合大范围拟合,在小范围内拟合有时无法体现其模型优势。最小中误差为分区三的最小二乘配置模型,中误差值为0.008 m。
3 测区概况二
3.1 实验二
实验二使用92个已知点,平面拟合参数(-325.328、0.000 024 8、0.000 458),计算拟合中误差为0.094 m,确定了大于中误差的残差点有35个,最大残差为83号点,为0.087 m。将大于中误差的残差点表示在图上并标记红色,根据实际情况进行分区处理,见图3,由于本区域较大,篇幅限制不再列举已知数据,图上点位紧凑,也不再标记点号。
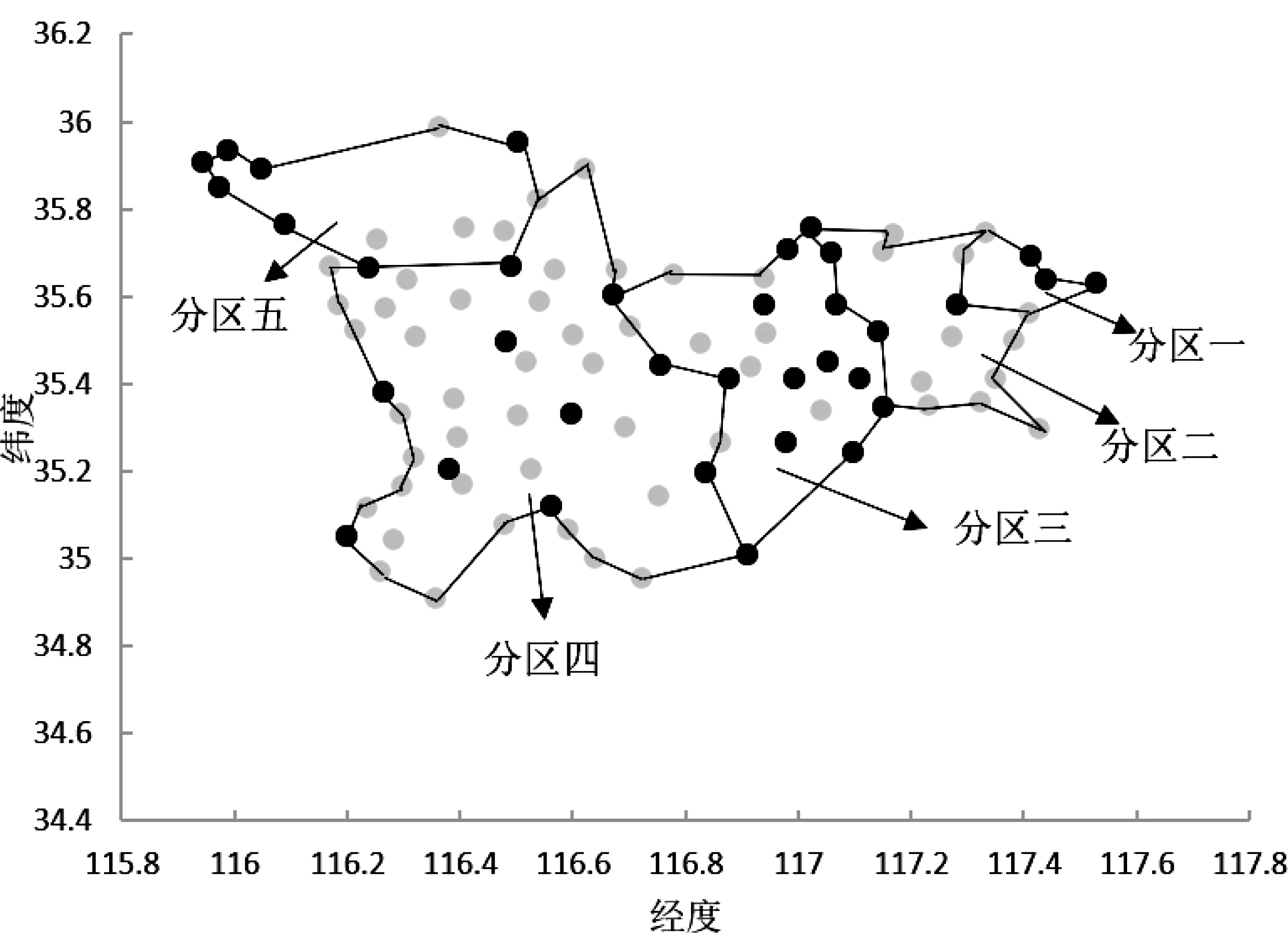
图3 分区图二
由图3分析可知,分区二、分区四主要以小于中误差的点为主,分区一、分区三、分区五主要以大于中误差的点为主,产生了19个边界重合点,其中分区一共计7个点,分区二共计18个点,分区三共计25个点,分区四共计48个点,分区五共计13个点。由于分区一、分区三、分区五主要以大于中误差的点为主,在此两分区中计算各点权重,使用式(4)解算拟合残差。
3.2 算例二
3.2.1模型参数
计算各分区拟合参数如下:
分区一(447 758.146、-0.005 33、-1.919、1.245×10-8、-4.744×10-11、2.053×10-6)
分区二(12 218.273、-0.015 7、0.073 9、3.221×10-8、1.337×10-10、-2.103×10-7)
分区三(-1 107 165.069、0.469、0.816、-1.205×10-6、1.057×10-8、4.270×10-6)
分区四(-1 690 732.967、-0.581、12.321 2、2.371×10-6、-6.485×10-8、-2.354×10-5)
分区五(-293 932.484、0.0129、1.167、-2.501×10-8、-1.924×10-10、-1.161×10-6)
多面函数平滑因子在各分区中取值分别为:1 200,2 260,1 100,950,1 420,模型待定系数见表4。
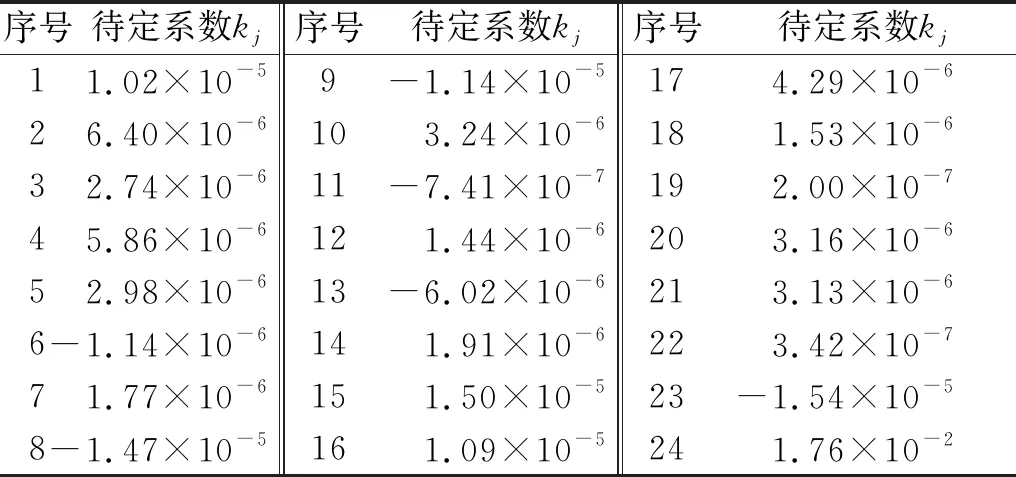
表4 算例二模型多面函数待定系数
3.2.2残差分析
根据3种数学模型拟合残差,绘制分区残差曲线图,如图4所示。
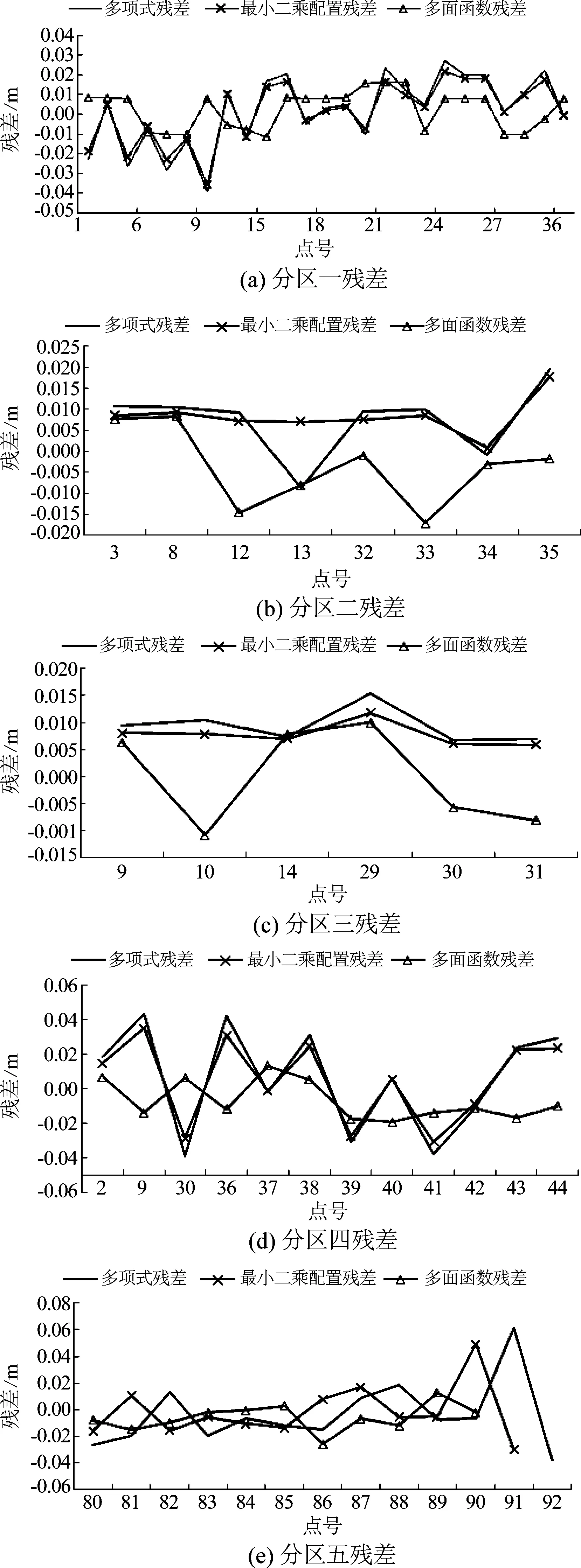
图4 实验二分区残差曲线图
大面积测区拟合中多面函数有明显的拟合优势,在各分区中拟合精度均处于较高水平。五个分区拟合中误差结果如表5所示。
由表5可知,多面函数模型在大范围分区拟合中取得了较好的拟合效果,各分区残差均较低;最小中误差出现在分区一的多面函数拟合法中;多项式拟合法与最小二乘配置法拟合精度较低,不适宜于实际工程应用。
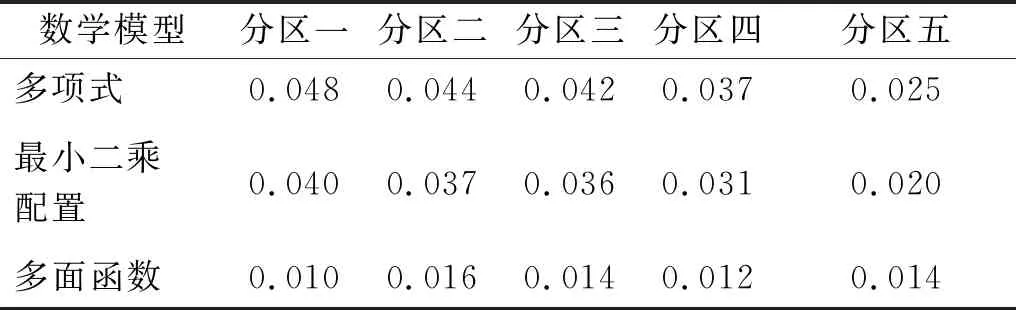
表5 五个分区的中误差 单位:m
4 结束语
本文提出了使用平面拟合中误差结果作为分区依据的分区方法,通过小面积、大面积两个实例验证该方法的拟合效果。实验证明在两个测区拟合中均取得了较好的分区拟合效果。分区划分时需要注意,分区过多虽然能提高精度,但是也会增加计算量,且需要更多的地面已知GNSS控制点,因此应兼顾精度与经济效益,选择合适的分区方案。针对3种数学模型分析,发现在小范围拟合中最小二乘配置法和多面函数拟合法精度接近,但在大范围拟合中多面函数有明显的精度优势,建议在分区拟合中当测区面积较大时使用多面函数拟合法提高拟合精度,在测区面积较小时使用最小二乘配置法即可获得较高的拟合精度。
