电动客车轮边驱动电机的转矩分配控制策略研究
2021-03-29王旭
王 旭
(扬州亚星客车股份有限公司,江苏 扬州 225116)
引言
随着科技与社会的快速发展,全球环境污染和能源危机日益严重,新能源汽车取代传统内燃机汽车是必然趋势,在客车方面,新能源客车也正在逐步占领市场,分布式驱动客车作为一种新兴的新能源车,也逐渐应用在市场中。
图1展示了我国从2010年至2019年的新能源汽车销量。据统计,2019年1月至12月,我国纯电动汽车的生产量与销售量分别为92.5万辆和85.6万辆,相较于2019年同时期增长51.8%和58.4%。根据预测国内2020年新能源汽车的销量将达到175万辆,同比增长41.5%。
1 分布式电动客车驱动力分配的介绍
分布式驱动客车以其相较于普通燃油客车的巨大的优势,逐渐成为近年来新能源车领域的研究热点,在其结构中,有四个电机分别布置于车轮侧,通过调控每个车轮的驱动力矩来确保车辆控制的灵活性和准确性。 而对于电动机驱动转矩控制是车轮驱动分布式客车的关键技术,其控制效果的好坏将会直接影响分布式客车的行驶状态。在电动客车驱动控制方面,分布式客车在行驶时,转矩控制策略会根据驾驶员的操作和路况,去调节驱动电机输出的扭矩,驱动扭矩控制策略包括驱动扭矩分配控制策略和驱动防滑控制策略。 而对于驱动扭矩分配,具体又可以分为横向和纵向驱动扭矩分配,即前后桥驱动扭矩分配和左右侧驱动扭矩分配[1]。

图1 近十年我国新能源汽车销量
2 分布式驱动电动客车驱动电机的匹配
电机的动力参数应根据车辆的基本参数选定,本文以GTQ6105BEVBT3为例进行设计匹配(见表1)。

表1 参数数据
2.1 电机参数的计算
驱动电机的性能影响着分布式客车的经济性和动力性,计算的主要参数包括:额定功率、峰值功率、额定转矩、峰值转矩等等。
2.1.1 峰值功率的计算
(1)按照整车性能参数表中的最高车速确定驱动电机的峰值功率,计算公式如下:

(2)按照如下公式确定轮毂电机的参数:

(3)根据最大爬坡度的要求按照如下公式计算驱动电机的峰值功率:

2.2 计算峰值转速
电机的峰值转速代表电机的无负载动力性能,根据表1中数据,确定电机的额定转速,按照如下公式:

式中,b为车轮滚动半径,n为电机转速,ig为主减速器传动比,vc为车速。
2.3 计算峰值转矩
电机的峰值转矩代表了电机在极限工况下的工作能力,其主要受制于车辆最大爬坡时的转矩、启动的最大转矩、车辆变速比等因素,可根据如下公式计算:

式中:Pmax-v为电机峰值功率(kW);Vc为最高车速(km/h);A 为迎风面积(m2);g为重力加速度(m/s");f为滚动阻力系数;传动系统效率;m 为车辆质量(kg);Vc为爬坡车速(km/h);Cd为空气阻力系数;a为道路坡角,单位为rad。
3 基于Cruise的整车模型建立
由于Cruise仿真软件丰富的模块化及建模方式、强大的功能等优点因此被广泛应用于整车性能仿真。首先利用Cruise软件搭建整车模型,从库中调取差速器、动力电池、制动器、车轮等模块,然后根据表,之后进行数据总线的连接。根据其中的参数对调取的各种模块进行调节。建模仿真包括三个阶段:前处理、任务计算和后处理。前处理包括方案设计、搭建模型、完成机械、电气连接。任务计算包括添加目标、设计计算任务、仿真验证设计计算的可行性。后处理包括对仿真结果查阅分析、优化设计方案。搭建好的模型如图2:

图2 Cruise整车模型
3.1 仿真工况的建立
在整车模型搭建完成后,设定好驱动力控制策略,然后将搭建完成的分布式客车模型在设定的路面工况下进行仿真,分析其动力性和经济性,之后验证动力系统参数的合理性,验证控制策略的有效性。在Cruise中建立了如下几种计算任务:
(1)首先是对车辆的动力性能进行仿真验证,一是最大爬坡度的验证。
(2)第二种情况是在车辆满载的情况下测试车辆的加速试验,验证其极限工况下的动力性能。
(3)接下来为了验证车辆是否能满足所要求的续航里程,设计循环工况来验证。
(4)最后为了验证分布式客车在最高车速下稳态行驶的能力。为了分布式客车在收到控制策略的控制下在不同路面工况的燃油消耗。这里复合工况采用多路面工况,中间段采用多个高速公路工况,在模拟路况的两端分别采用典型的中国城市公交路段和一段 EUDC城郊道路工况进行复合模拟。由此,一段构建了城市、市郊及高速等多种路况特征的循环工况信息建成,总里程为290km,平均车速为72.5km/h,最高车速88.5km/h[3]。
3.2 电机的控制策略及优化
然后设置对整车VCU模块对扭矩分配的控制策略:
(1)使用查表的方法,VCU根据接收到的车速、油门踏板行程等信号,计算得到四个电机所需要的总制动力矩和驱动力矩。
(2)接下来计算两种特殊工况下。第一种是当分布式驱动电动客车的制动踏板行程为0、油门踏板行程不为0时,分布式客车接收到信号,VCU发出控制指令,客车进入驱动模式。通过计算得到所需的总驱动扭矩与后轮双电机驱动允许最大扭矩值相除,得到分布式客车的负荷率系数 p,其取值范围为 0~1。然后将该系数与汽车进入四轮驱动模式的阈值相比较,如果计算所得系数比预先设定的系数大,分布式客车进入四电机驱动模式;如果系数小于阈值则进入后轮双电机驱动模式。
(3)第二种情况是当制动踏板行程不为0、油门踏板行程为0时,VCU检测到信号触发制动模式。在客车进入制动模式后,VC重复步骤(2)对步骤(1)计算得到的总需求制动扭矩计算,得到四个电机分别需要的具体制动扭矩值[2]。
仿真输出的电机转矩分配图如下:
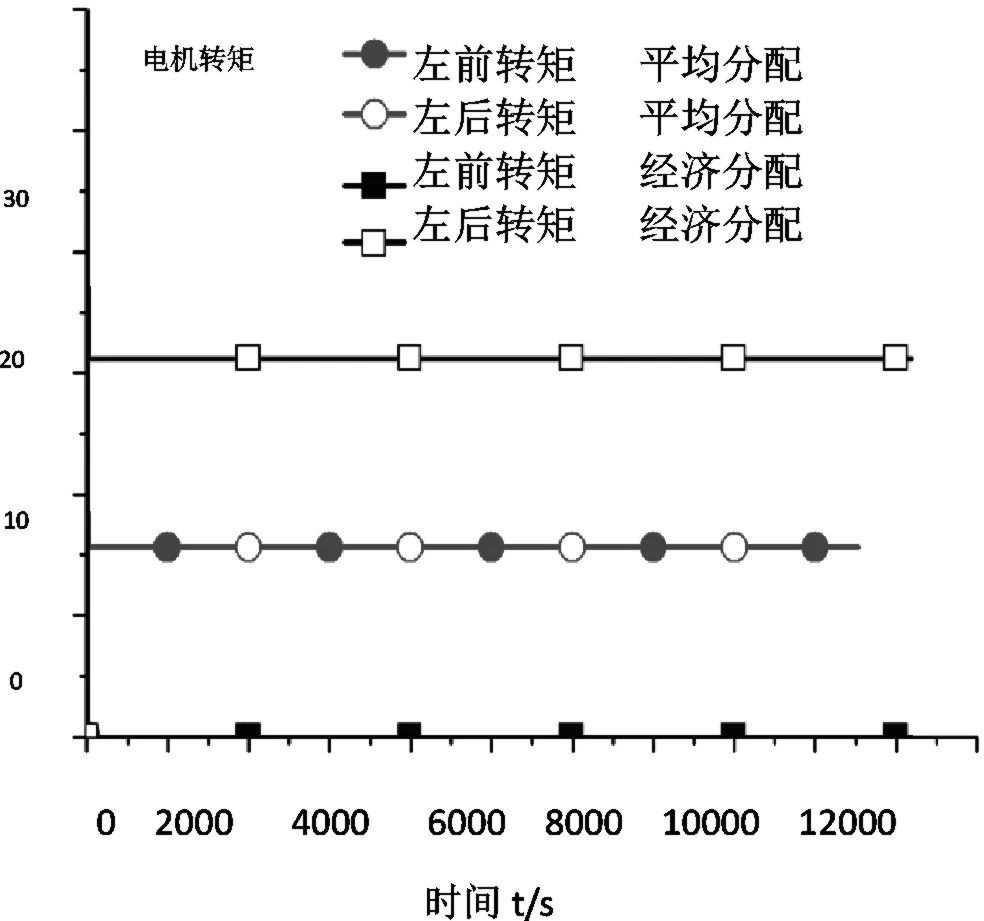
图3 四个电机转矩分配对比
4 总结
本文选取了分布式客车的基本参数,然后根据选定的参数对电机的额定转矩、峰值转矩、额定转速、峰值转速、峰值功率等参数进行了计算。之后使用Cruise软件对分布式客车进行整体建模,然后对客车进行基于经济性和动力性的电机驱动策略优化。最后通过仿真验证。根据仿真分析的转矩图可以看出受到基于经济性的转矩分配策略分布式客车在不同的行驶状态下分配比也不同,但都有效地提高了客车的经济性和动力性。