冰区浮式核电平台定位系统优化设计
2021-03-16李红霞王莹黄一季顺迎
李红霞, 王莹, 黄一, 季顺迎
(大连理工大学 运载工程与力学学部,辽宁 大连 116024)
北极战略资源开发受到国际社会的普遍关注,但海上资源开发需能源供应。传统柴油发电模式易造成空气污染,零碳排放且可持续供给的核能,具有其他能源不可比拟的优势。冰区浮式核电平台可为冰区海上开发作业提供持续电能、热能和淡水[1],虽然核能有安全隐患,但也因自身优势,使与之相关的工程装备具有无法替代的特殊地位[2]。此外,我国海域也有冰区,设计可适应冰区海洋环境的浮式核电装备,对冰区海洋开发意义重大。很多学者对此进行了广泛而深入的研究。浮式核电平台设计方面,Buongiorno等[3-4]提出了一种圆柱型浮动式核电站概念。学者分别提出了重力基础式和下沉式海上核电平台概念[5]。Hu等[6]对海洋环境中平台堆芯失稳问题进行了研究。薛彦卓[7]梳理出极地船舶与浮体结构物有待研究的力学问题。冰载荷预报方面,黄炎等[8]采用模型试验研究了冰载荷随冰速、冰厚等变量的变化规律;季顺迎等[9-11]运用离散单元法对浮冰与船体的相互作用进行数值仿真,开发了具有自主知识产权的冰载荷预报软件Sdem。在系泊系统研究方面,Hamidreza等[12]研究了系统参数敏感性。康庄等[13]从定位能力方面对比了张紧式与半张紧式系泊。刘元丹等[14]研究了风浪流载荷下单点系泊浮体的响应。乔东升等[15]研究了张紧式锚泊动张力。但目前的浮式核电平台概念很少涉及冰区海洋中的定位问题,海冰区浮体系泊系统响应研究也较少见。本文针对自主设计的1 000 m水深浮式核电平台,用时域耦合算法研究在冰、浪、流、风作用下的平台响应,探究系统参数影响规律,以提高定位效果、降低系泊动张力幅值为目标,优化系统设计。
1 初始设计方案及分析
海上浮式平台的运动方程包含惯性力、阻尼力、回复力、系泊力及环境载荷,具体如下:
(1)
Fm2i(t)-FIi(t)
(2)
对于有系泊系统的浮式平台动力分析常采用集中质量法,将系泊缆进行离散,每段用一质点表示,质点间通过弹簧连接,最终结合运动方程求解浮体的运动响应及各缆绳的张力响应结果。
根据核电平台功能性要求,完成了分离式核电平台总体设计。该平台共包含3部分:内部核堆支撑平台、外部环境承载平台和连接机构。外平台为圆台对接的沙漏型结构,内平台为圆柱型结构,主要用来放置核反应堆装置[3]。该平台的系泊系统由内部张力腿系泊和外部半张紧式系泊构成,分别限制水平面外和水平面内的运动,从而巧妙约束平台整体6个自由度的运动。平台的主要参数如表1,平台总布置如图1所示。
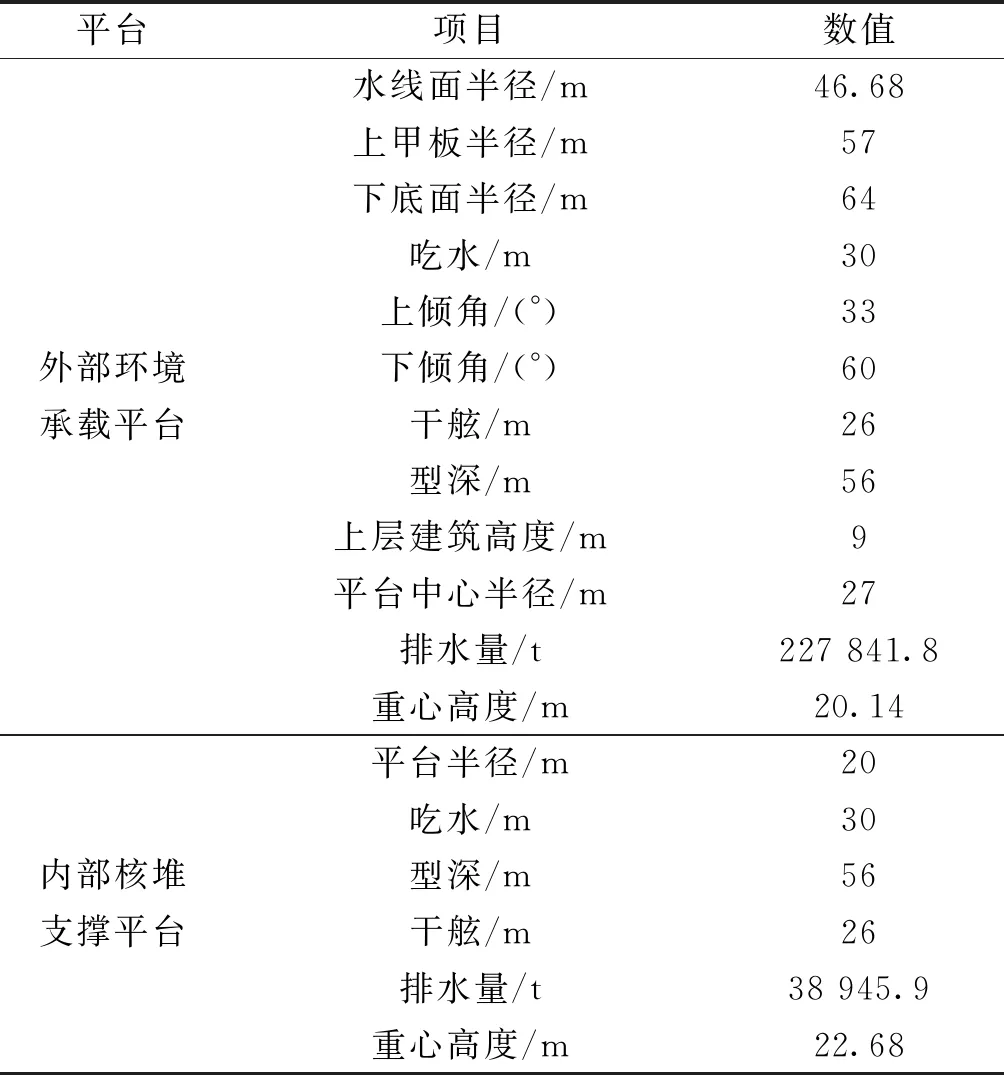
表1 平台主要参数Table 1 The main parameters of platform
根据北极海域的海况统计情况确定无冰时的计算海况如表2所示。由于浮体为回转体,一般浪风流同向时系泊系统受力较大,后续计算中浪风流取为同向,浪向角取0°(between lines)和45°(in lines)2个方向。
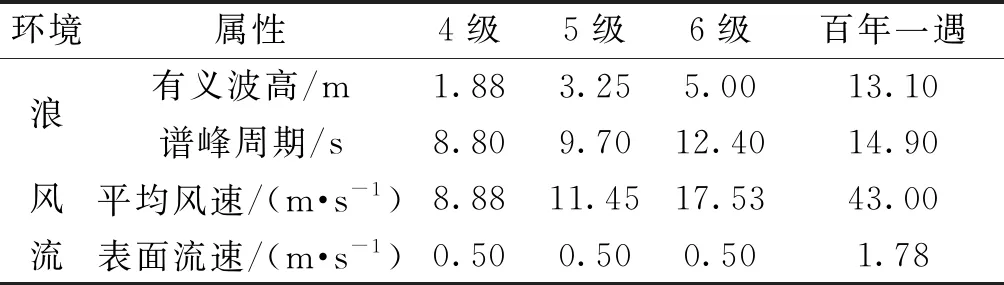
表2 北极海域计算海况Table 2 The calculated sea condition of Arctic zone
系泊系统的设计条件一般包括平台的水平偏移量、系泊缆的张力限制、安全系数以及疲劳寿命等,参考规范主要为API RP 2SK和API RP 2SM规范,本文主要从平台水平偏移和系泊缆张力这2个方面进行研究。
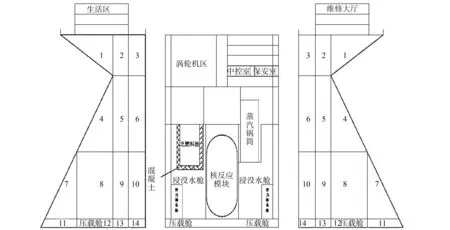
图1 冰区核电平台总布置Fig.1 The layout of nuclear power platform
一般而言,在正常作业工况下,API规范允许的位移量为5%水深,而根据工程经验,在生存工况下,允许的位移量为10%水深,以保证平台的正常作业。对于系泊缆的张力,通过最大张力安全系数来衡量,即系泊缆所受最大张力占锚泊线破断强度(MBS)的百分比。极限条件下的安全系数为1.25。
平台外部采用了半张紧式的系泊系统,初选为12根均布式系泊系统进行研究,具体形式如图2所示。系泊水深为1 000 m,系缆长度为2 120 m,系泊半径为1 850 m,预张力为1 980 kN,预张力倾角为42.8°,系泊缆材料如表3所示。
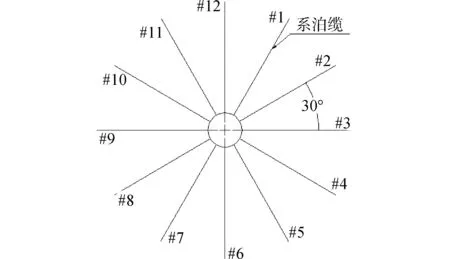
图2 均布式系泊系统设计Fig.2 The layout of even-distributed mooring system
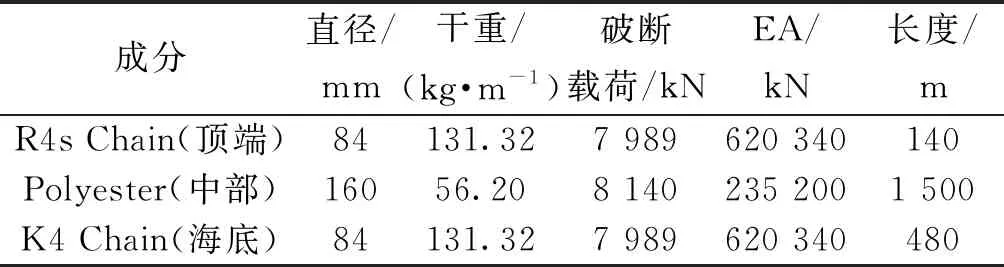
表3 系泊缆绳材料Table 3 The cable material of mooring system
连接机构选用弹簧阻尼连接,连接机构设计为4组弹簧与阻尼器,对称安装在内外平台中部位置,如图3所示[18]。连接机构阻尼器阻尼系数为2 000 kN·s/m,弹簧刚度系数为100 kN/m。
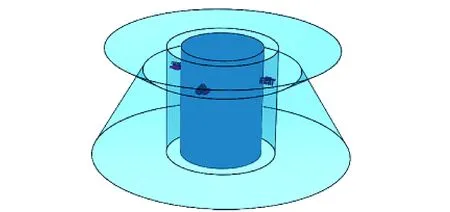
图3 弹簧阻尼连接机构Fig.3 Spring-damp connecting mechanism
环境载荷承载平台腰线下部独特的倾角设计使海冰主要破坏形式为弯曲破碎,大大减少结构所受冰载荷,其上部结构又可防止甲板上浪及碎冰爬升,保证作业的安全性。通过构造海冰离散元模型对外平台冰载荷进行数值模拟。建立实尺度几何模型,对冰原从未接触平台至穿过整个平台并达到最终稳定的全过程进行数值模拟。根据北极冰况[19],取冰速设置为0.5 m/s,冰厚为1 m。平台所受水平冰载荷和垂向冰载荷的时间历程曲线见图4、图5。
可见,水平冰载荷呈阶段性变化,接触初期,载荷作用较小,随后逐渐增大并达到稳定状态,稳定阶段(200~600 s)平均值为14 317 kN,峰值发生在t=507.0 s,为30 206 kN。同样,垂向冰载荷变化趋势与水平冰载荷大致相同,峰值发生在t=575.6 s,为15 285 kN。得到冰力时程结果后,将该数据作为外载荷施加于平台整体,计算平台在单独冰载荷作用及冰风流联合作用下的运动响应,为保证计算精度,考虑计算时长为1 200 s,在后700 s运动达到稳定。风流速度取六级海况下的风速和流速,方向与冰载荷作用方向相同。得到平台六自由度运动响应最大值和系缆顶部张力最大值,结果见表4和表5。
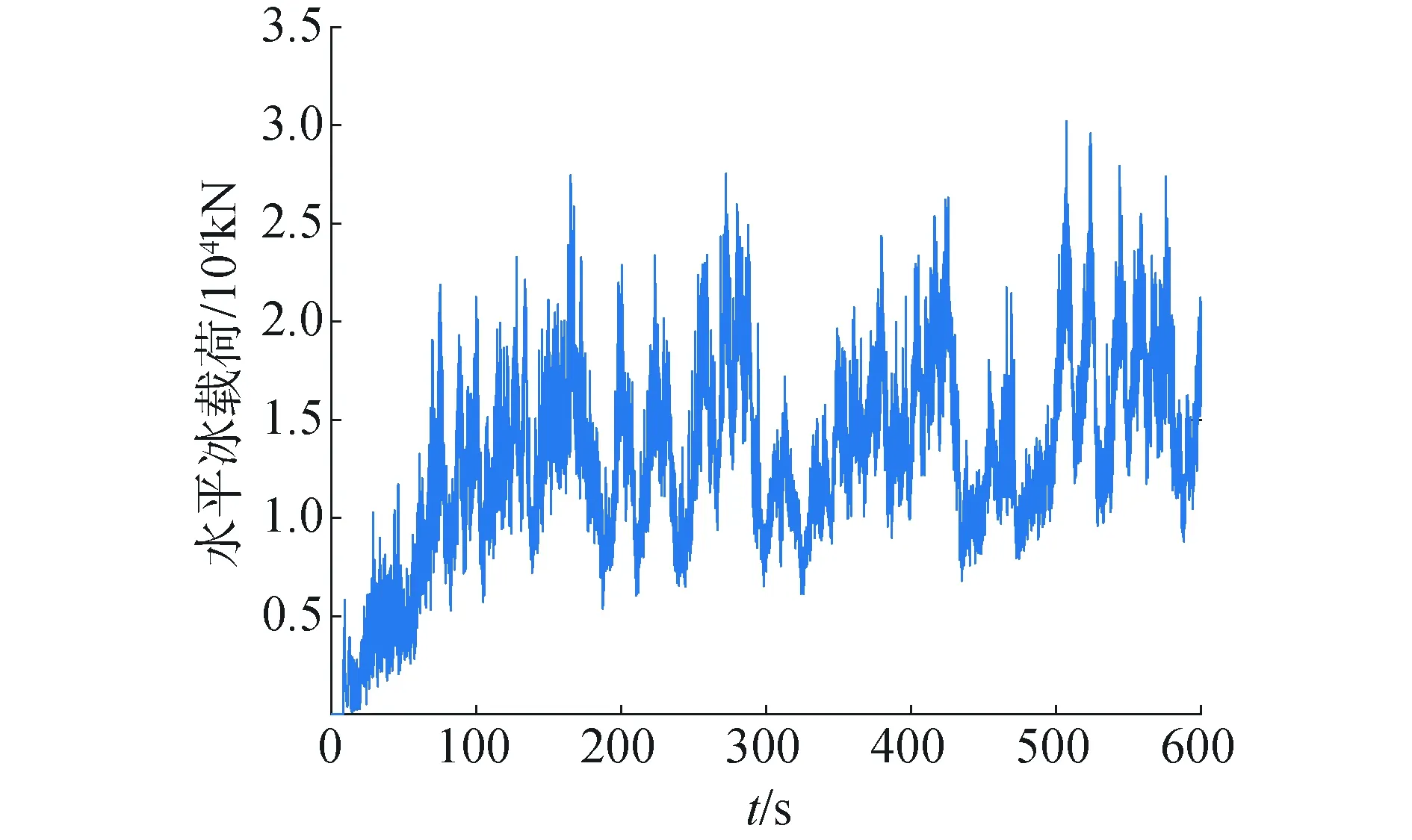
图4 平台所受水平冰载荷Fig.4 The horizontal ice loads of platform
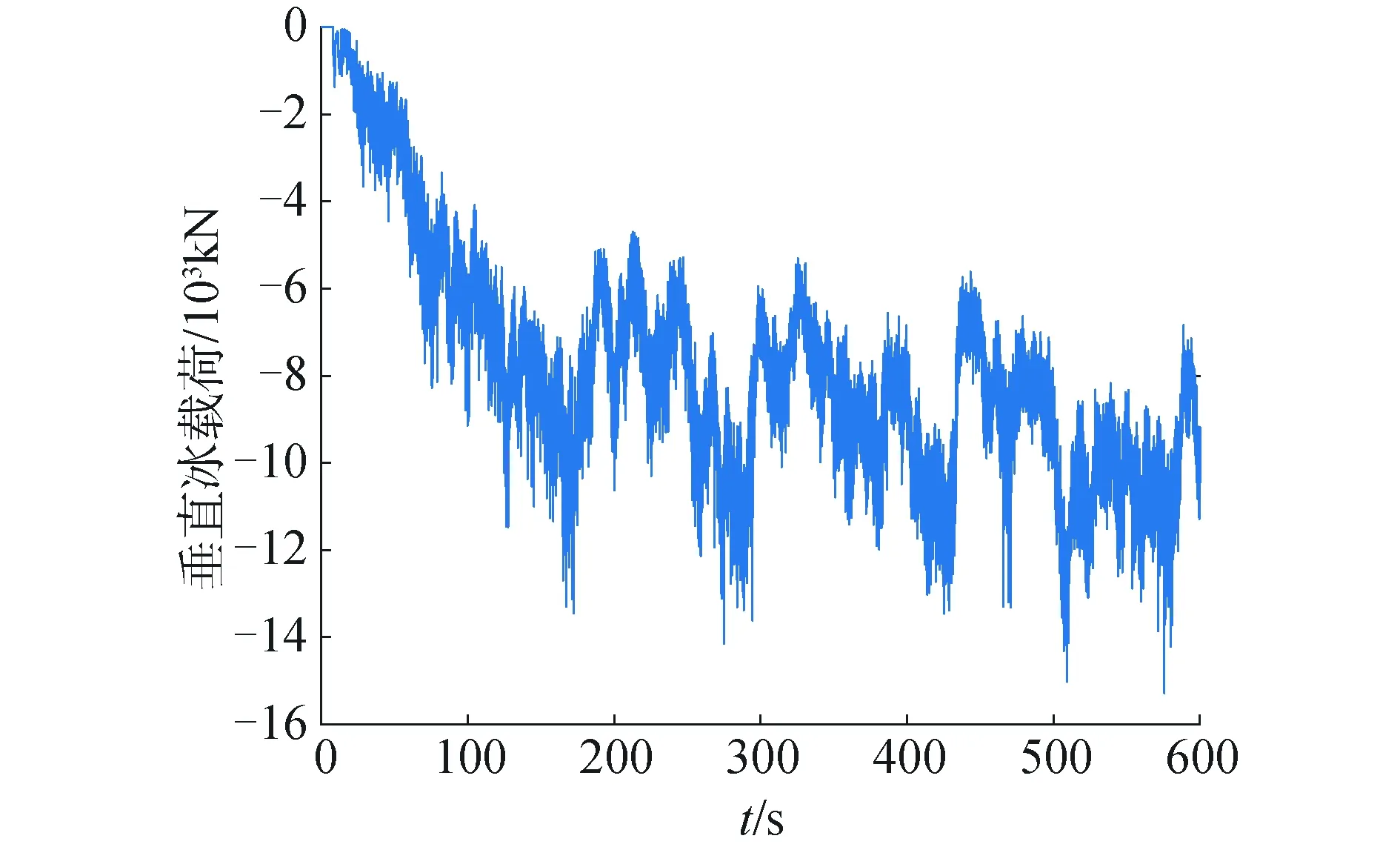
图5 平台所受垂向冰载荷Fig.5 The vertical ice loads of platform
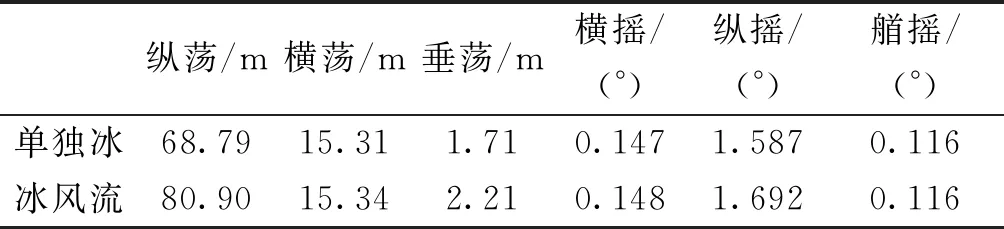
表4 外部平台运动响应最大值统计Table 4 Maximun motion response of outer platform
可见,冰载荷对平台纵荡、横荡和垂荡运动影响较大,对横摇、纵摇和首摇运动影响较小,因为冰载荷作用位置与平台重心相差较小使得其力矩较小;风流载荷对平台纵荡影响较大,对其余自由度影响较小。冰区环境中,定位系统对平台运动具有控制能力。在两种情况下,9号系泊缆受力最大,最大值分别为3 492 kN和4 696 kN,满足规范要求。

表5 系泊缆最大张力统计Table 5 Results of maximum mooring line tension
2 定位系统优化设计
定位能力影响主要因素包括:系泊布置形式、系泊缆数目、缆间夹角、预张力倾角、预张力大小、连接机构形式等。基于三维势流辐射-绕射理论对平台的定位系统进行动力响应时域分析[14]。
2.1 系泊布置形式优化
浮式平台系泊系统通常包括多根系泊缆,其布置形式之间影响定位能力。除初始12根均布式系泊方案,还比较了四点式系泊方案。后者布置方式为将12根缆绳分为4组,每组相邻2根之间的夹角为5°,每2组系泊缆中心线间的夹角为90°,见图6。考虑载荷作用方向为0°,计算结果见表6和表7。由于单根系泊缆顶部导缆孔处张力最大且聚酯纤维缆破断载荷大于锚链,故取系泊缆顶部最大张力进行校核,后面计算同理。
可见,均布式和四点式系泊在各计算工况下平台的纵向位移相差较小,约为0.6%。但均布式系泊较四点式系泊最大张力值偏大,在百年一遇极限海况下前者安全系数小于1.25,已不满足规范要求。选择四点式系泊进行后续优化。
2.2 系泊缆数目优化
因半张紧式系泊主要限制水平面内的运动,以纵荡位移为优化目标。计算8根、12根及16根系泊缆,在0°方向载荷作用时的时域结果,见表8。不同系泊缆数目对应的系泊缆顶部张力响应结果见表9。

表8 0°载荷下不同数目系泊缆的平台纵向位移最大值Table 8 The maximum longitudinal platform motion for different mooring lines numbers in 0° load direction
表90°载荷下不同数目系泊缆的顶部张力最大值
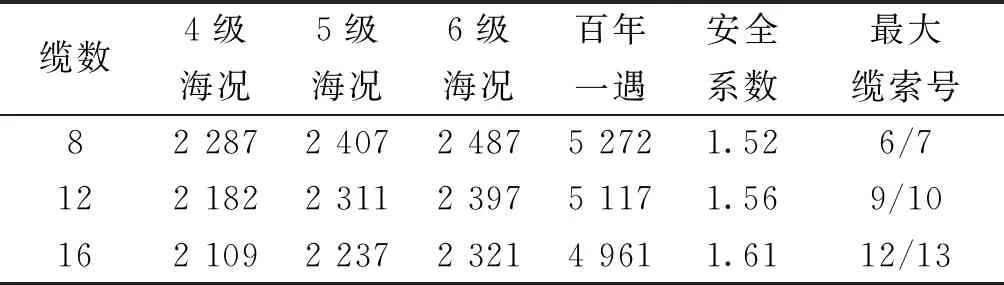
Table 9 The maximum top tension for different mooring lines numbers in 0° load directionkN
由计算结果可见,随着系泊缆数量增加,平台偏移量减小,定位能力增强;8根系泊缆在百年一遇极限工况下偏移量达到9.45%。随着系泊缆数量增加,系泊缆顶部最大张力减小,12根与16根系泊缆布置时其顶部张力都较小,安全系数较高。综合考虑平台定位性能和经济性能,优先选用12根系泊缆方案。
2.3 系泊缆间夹角优化
系泊缆间夹角一般为4~15°,计算5°、10°和15°这3种情况。选取极限海况进行计算,不同夹角下平台运动响应和系缆顶部张力结果见表10。
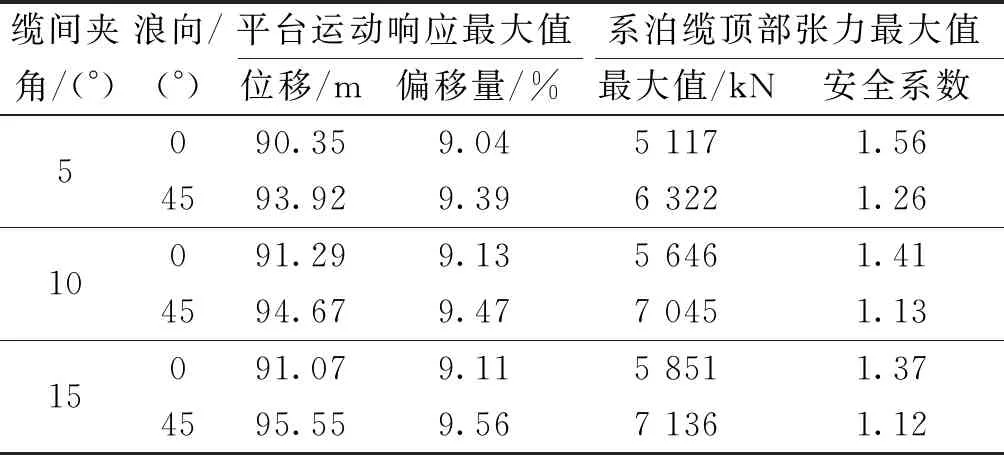
表10 极限海况下不同系泊缆间夹角的响应结果
可见,缆间夹角为5°时,平台偏移量较小,缆顶部最大张力也较小;夹角为10°时,平台运动响应整体较大;随着系泊缆夹角增大,系泊缆顶部最大张力增加,仅5°夹角时系泊缆能够满足安全性要求(大于1.25)。因此,缆间夹角取5°。
2.4 预张力大小优化
预张力是指系泊系统在平衡状态下无外界扰动时的初始张力值,通过改变系泊缆中间段的长度来改变该值。系泊半径为1 850 m,选取临界状态(缆恰好绷直)时中间段缆长1 483 m、初选缆长1 500 m及较松弛时缆长1 517 m进行计算,平台运动响应及系缆顶部张力结果见表11。
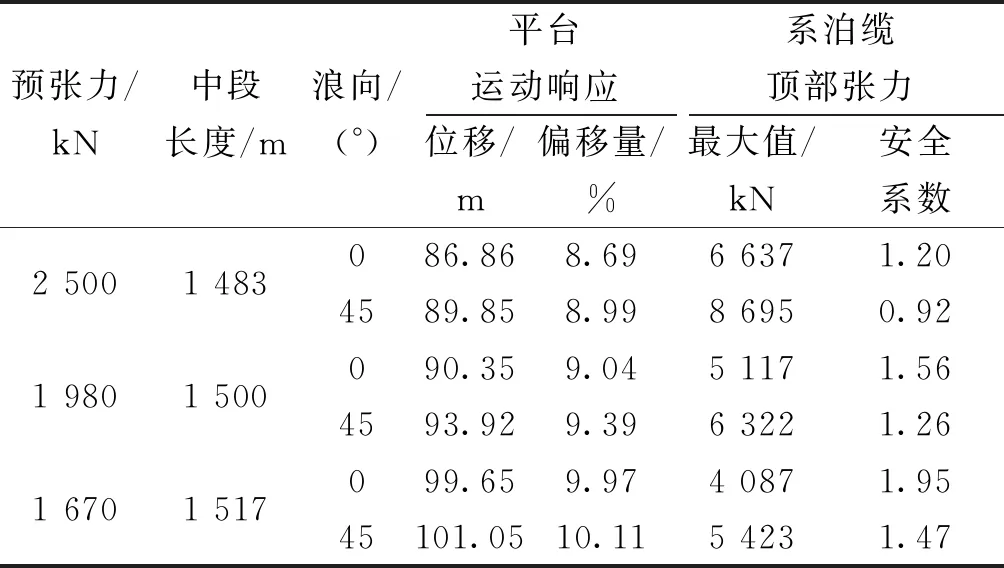
表11 极限海况下不同预张力大小的响应最大值
可见,随着预张力减小,平台水平位移明显增大,预张力为1 670 kN时平台水平位移最大,不能满足规范要求。随着预张力的增大,系泊缆顶部最大张力也增大,当预张力为2 500 kN时,在45°载荷作用方向下,系泊缆顶部最大张力达8 695 kN,安全系数为0.92,不满足规范要求。最终选择1 980 kN为初始预张力,中间段缆长为1 500 m。
2.5 预张力倾角优化
对于半张紧式系泊系统,预张力倾角也将影响其定位效果。通过调整系泊半径来改变张力倾角,为保证预张力大小不变,同时调整系泊缆长度。故设置系泊半径分别为1 800、1 840、1 850、 1 860、1 900 m进行分析,计算结果见表12。
可见,随预张力倾角减小,平台水平位移呈非线性变化,在倾角为42.8°时最小。
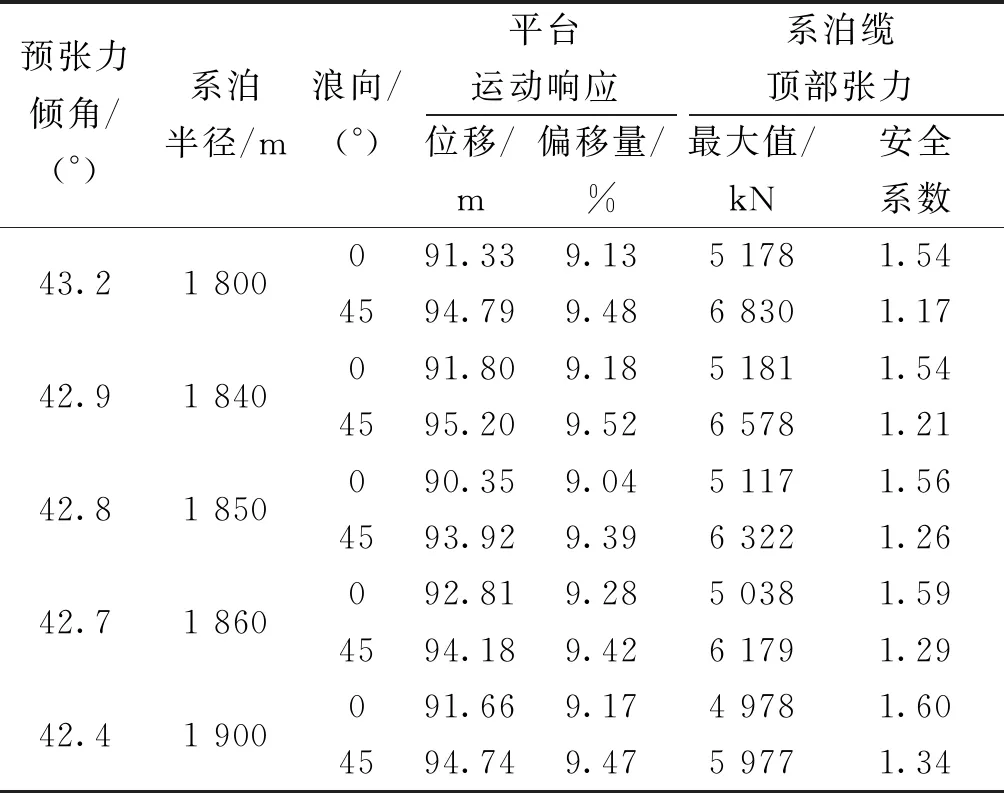
表12 极限海况下不同预张力倾角的响应结果
2.6 连接机构优化设计
弹簧阻尼连接机构传递6自由度受力。为更好解耦内、外平台横摇、纵摇、垂荡3自由度运动,提出了分离式连接机构,见图7。该机械机构通过圆环和滑动套筒解耦上述3自由度运动。
图7 分离式连接机构示意图Fig.7 separation type connecting mechanism
百年一遇海况,风浪流0°入射时,内部平台水平面外运动最值结果见表13。可见,分离式连接机构可有效减少平面外运动幅值,设计方案更优。

表13 内部平台水平面外运动最大值
3 结论
1) 在冰、风、流环境中,浮式核电平台定位系统具有定位能力。
2) 在风、浪、流环境中,系缆张力较大,在所选参数范围内,随着系泊缆数目增加和缆间夹角减小,平台运动响应及系泊缆顶端最大张力都减小。
3) 初始预张力的增加虽使平台水平位移减小,但最大张力会增加。
4)相对而言四点式较均布式定位能力更优,分离式连接机构较弹簧阻尼式连接机构更优。
5) 优化结果使得计算工况下平台的水平偏移量和缆索动张力最大值均满足规范要求,为实际工程应用提供了合理参考。
本文研究的冰情、海情不够充分,还需考虑不同冰厚、冰速、碎冰、海冰密集度、万年一遇海况等研究系统定位能力。