四足机器人在煤矿中的使用分析
2021-03-15张向东
张向东

摘 要:实现对煤矿机设备的自动化、智能化、规范化管理,从根本上解决煤矿人机管理遇到的问题,现将四足机器人科学应用煤矿中,用自动化操作代替手工操作。首先针对煤矿存在的问题,介绍了四足机器人的结构,其次,探讨了四足机器人在煤矿管理中的具体应用。结果表明:四足机器人具有非常高的应用价值和应用前景,不仅可以缩小人力成本、物力成本和财力成本,还能保证煤矿煤矿生产的高效性和安全性,起到了减员增效的作用。因此,四足机器人值得被进一步推广和应用于煤矿中。
关键词:四足机器人;煤矿;使用
1煤矿常见问题
1.1作业环境复杂危险
煤矿 作业环境具有一定的复杂性和危险性,在开展煤矿 作业期间,经常遇到矿井水灾、矿井粉尘灾害、矿井火灾等灾害。在煤矿 开采深度不断增加下,这些灾害出现的概率也在不断上升。目前,煤矿 开采深度远远超过了500n,个别煤矿 开采深度甚至超过了900m,这无疑增加了矿井热害发生的风险,为矿井的生产埋下了一系列的安全隐患。
1.2劳动力密集
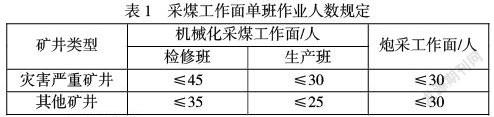
煤矿生产需要大量劳动力,这无疑增加了企业劳动力的密集度。对于大型矿井交接班而言,需要的作业人员达到了900人以上;对于灾害比较严重的矿井作业交接班而言,其作业人数达到了90人以上。采煤工作面单班作业人数规定如表1所示。 一旦矿井出现安全事故,将会危及作业人员的人身安全和财产安全。
1.3劳动强度高
煤矿 作业人员在日常的工作中,其劳动强度较高,具体表現在劳动力消耗大和劳动时间长。煤矿 作业人员所 使用的系统功能比较复杂,地面作业需要花费的时间在3h以上,在这个过程中,需要人工搬运大量的辅助运人设备,其步行时间在2h以上。此外,由于矿井作业空间相对较小,无法使用大型设备,对较大设备进行更换操作,这就需要作业人员手动进行搬运和更换。另外,煤矿 作业人员的工作时间在17h以上,作业期间不能休息,需要持续不间断地作业。
2四足机器人结构
四足机器人机械结构如图1所示,从图中可以看出,该机器人主要由两大部分组成,分别是四条仿生腿和机器人主体。其中,仿生腿主要由膝关节、踝关节、髋关节和足端四个部分组成。根据仿生腿结构设计参数[1],不难发现膝关节中心端与踝关节中心端之间的距离为77.33mm;髋关节中心端与膝关节中心端之间的距离为37.72m;踝关节中心端与足端末端之间的距离为82.01mm。四足机器人在日常的行走中,需要借助支撑腿的力量,与地面接触后,利用地面摩擦力,进行定向运动。
3四足机器人在煤矿中的应用
3.1具体应用
3.1.1煤矿工作者对四足机器人的应用
我国煤矿具有资源丰富、能源消耗快等特点,而煤矿开采属于一种高危险职业,煤矿巡检工作的有效开展在提高煤矿生产可靠性和安全性方面具有重要作用,而四足机器人的出现和应用可以突破传统巡检方式的局限性,保证巡检高效性和实时性。在开展煤矿作业期间,为了给作业人员提供安全、可靠的工作环境[2],要利用四足机器人开展巡检工作,使得人工巡检工作完全被代替,这是由于四足机器人在软硬件方面具有自动化、智能化巡检能力。从四足机器人硬件技术层面分析,发现四足机器人在硬件方面具有快速收集和整理煤矿信息数据的功能,同时,还能利用监控摄像技术,实时整理和汇报预警内容,因此,四足机器人在煤矿巡检工作应用方面表现出较高的可靠性和安全性。另外,根据煤矿巡检工作所在环境的特点,通过使用四足机器人,可以提高巡检工作效率和效果,为缩小人力成本、物力成本和财力成本创造良好的条件。由此可见,为了充分发挥和利用四足机器人的应用优势,相关人员要加强对矿井情况的深入调查,通过不断修改、优化和完善四足机器人设计情况,使得四足机器人具有功能强大、实用性强特点[3],为煤矿作业人员的日常工作提供了极大的便利。
3.1.2四足机器人在工作过程中的应用
四足机器人通过利用自动化遥控方式,可以在无人值守的状态下,借助支撑腿进行移动,从而实现对四周环境的实时巡检,一旦发现设备出现运行异常问题,四足机器人会通过探测环境温度、湿度以及气体成分和浓度,启动预警功能,以引起维修人员的注意,确保设备运行异常问题能够在第一时间内被快速地分析和解决,为进一步提高设备运行性能,保证巡检工作的开展效率产生积极的影响[4]。此外,四足机器人通过利用自身携带的摄像头可以对煤矿生产现场图像、视频的实时采集,同时,借助光纤以太网,利用云数据平台,对可能威胁传送皮带运行安全的铁管、木头、工具等物料的实时监测和识别,另外,还能全面地采集和分析输送皮带机中断点相关数据,及时发现和解决输送皮带机运行异常问题。最后,一旦煤矿生产遇到紧急情况,工作人员可以在第一时间内开启四足机器人,使得四足机器人进入到煤矿生产现场,对煤矿生产现场相关图像和视频进行采集[5],并将其传输到指挥中心,以达到防灾减灾的目的。
3.2应用效果
某矿主斜井胶带的机长、带宽和提升能力分别达到了3349m、3m,1950万t/a,现使用四足机器人代替人工巡检。通过利用四足机器人在开展巡检作业期间,通过利用机器人的智能化识别功能,对理胶带的实际运行图像、温度、烟雾、气体浓度等信息进行自动化识别和追踪,并借助大数据分析预警技术,对胶带在实际运行中可能出现的故障问题进行超前预判,和预警。相对于人工巡检模式而言,机器人巡检模式可以确保胶带故障停机时间缩小了0.6h,同时,替代的巡检工人达到了13人,因此,机器人巡检模式具有较高的技术可行性和经济可行性。
结束语:
综上所述,四足机器人凭借着自身可靠性高、安全性强、安装简单、操作方便、维护简易等优势,被广泛地应用于煤矿中,不仅可以帮助作业人员轻松地应对易燃易爆、有毒气体危险工作环境,还能有效地避免了因机电事故而导致煤矿停产进而引发不必要的经济损失,同时,还降低了操作人员的体力劳动强度,为达到减员增效的目的发挥出重要作用。因此,将四足机器人应用于煤矿生产中是势在必行。
参考文献
[1] 刘洋,陈佳品,程君实.基于OpenGL的四足机器人步态仿真系统[J].计算机工程,2020,33(5):12-13.DOI:10.3969/j.issn.2096-711X.2020.05.006.
