基于MATLAB对三维激光扫描数据的精度评定
2021-03-01李奎良林志鹏
袁 凯 李奎良 林志鹏
(四川电力设计咨询有限责任公司,四川 成都 610041)
0 引言
与传统测量相比,三维激光扫描技术的最大特点是能够完整、快速以及高精度地获取扫描对象的点云数据,建立扫描对象的三维模型,从而作出更具体、更形象化的分析与对比,实现了从单点测量到整个曲面测量的质的飞跃。三维激光扫描测量获得的是由点云数据组成的数据模型,可以直观地看出模型的形状。目前,对于三维激光扫描数据的处理方法主要是通过对曲面的数据处理,其中,典型的样条曲面包括B 样条曲面、Bezier 曲面和 NURBS 曲面。曲面模型重建方案的选择依赖于数据点本身的分布和排列情况,该处理方法都是通过对曲面的具体对比来提取某个位置点位的具体变化,从而推算某个区域的变形情况,其在本质上没有太大的差别,而且曲面拟合方法的缺点是不能具体计算以达到的数据精度。传统的数据处理虽然有同名点的比较,但是只能在单点比较中应用,不能在三维激光扫描的海量数据处理中应用[1]。根据曲面分析点位数据变化的分析难以精确判断点位,容易出现错位比较;并且,相关人员无法对所获取的曲面数据进行具体的精度分析,使根据现有三维激光扫描数据处理方法获得的测量成果的权威性难以得到保障。因此,该文提出首先将曲面转换成曲线;其次,将曲线分解转换成点;最后,结合MATLAB 对点云数据进行分析,从而达到对三维激光扫描数据进行精度评定的目的。
1 点云数据的预处理
由于地面三维激光扫描仪采集到的点云数据一般是通过从多个控制点上架设的仪器测量、扫描中获取的,而且在扫描过程中由于仪器本身的系统误差、测量对象表面粗糙度及各种偶然误差的影响,使获取的点云数据中会有大量的噪声,在对数据进行分析时,需要对点云数据进行误差分析及误差改正。其中包括点云数据粗差的剔除、点云数据的拼接、噪声数据的去除以及点云数据的滤波处理等,最终得到点云数据的三维模型。在点云数据的精拼接方面,以Besl 等提出的迭代最临近点(ICP)算法为代表[2]。点云数据往往不能直接应用到实际工作中,需要进行拼接、滤波、精简、分割及曲面重建等一系列的数据预处理。后来,Johnson 等人通过采用邻近域搜索和多分辨率尺度搜索的方法对ICP 算法进行了改进,提高了其同名点的搜索效率和精度[3]。
2 点云数据转化为单点数据
该试验为了更加形象、精准地研究三维模型的整体精度,对三维激光扫描扫描数据进行精度评定,研究人员将从曲面数据中寻找具有代表意义的曲线数据,将曲线数据转化成单点数据,再对单点进行精度评定。研究人员对点云数据预处理后进行曲面重建,按照曲面的形式展示出三维模型。目前可以将点云曲面重建方法大致分为隐式曲面重建方法、参数曲面重建方法和基于网格的曲面重建方法,该试验选用的是参数曲面重建方法。
其次,当完成曲面重建后,再从曲面中划分出具有代表意义和容易区分的点云线(尽可能地具有代表性),例如沿1 个垂直于Z轴的平面竖直剖开,将垂直于Z轴的平面看做无数条相同性质的点云线,选择1 条点云线,也可称为云剖线,就可以实现从曲面到曲线的转换;再对这条云剖线进行分析,其变形信息就可以映射出曲面的变形信息。
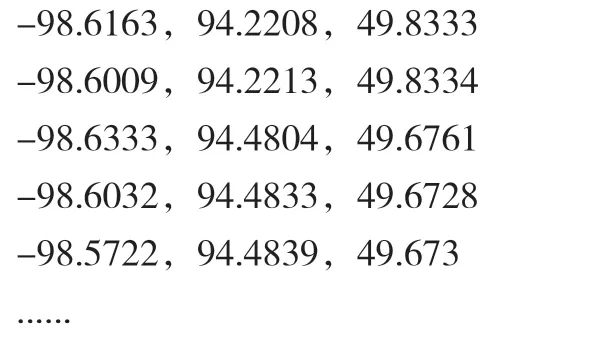
得到云剖线后,对云剖线上的节点进行曲线拟合,曲线拟合的方法主要包括最小二乘曲线拟合以及三次样条曲线拟合、多次样条曲线拟合。该试验通过对比测试,最终选择三次样条曲线拟合方法; 三次样条拟合函数就是运用三次样条插值yy=Spline(x,y,xx),在给定的 (x,y) 离散点数据中,寻求1 个三次多项式,使其逼近每对数据 (x,y) 点的曲线,在点云线和拟合曲线上取相同的x值,与相应的y值进行比较;首先,将测量数据输入RiSCAN_PRO 软件中,将点云线的三维坐标以txt 的格式导出。导出的数据结果(x,y,z)如下所示。
再次,通过如下代码在MATLAB 中实现三次样条拟合曲线。

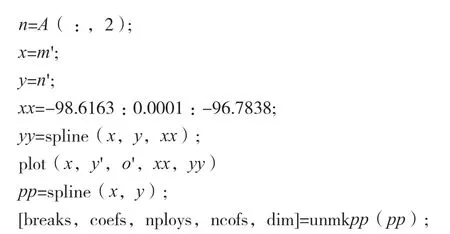
最后,对拟合后的曲线进行分析。
经过上面的步骤,可以转化成对曲线进行分析。在拟合过程中,为了保证三维激光曲线拟合的一般性,需要选择其中的部分点位作为该试验的标靶点。研究人员将得到的标靶点拟合坐标值与实测值进行对比,其对比结果见表1。
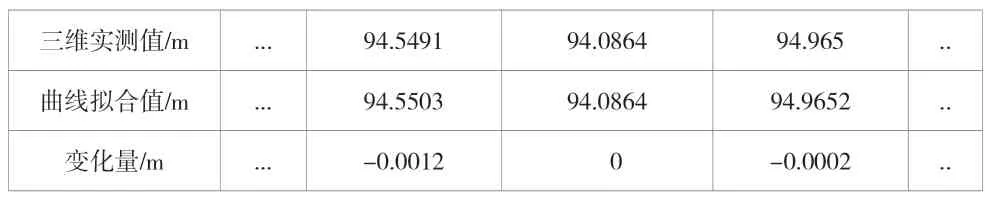
表1 实测值与拟合值的统计表
根据相关指数拟合公式可以计算其拟合度,如公式(1)所示。
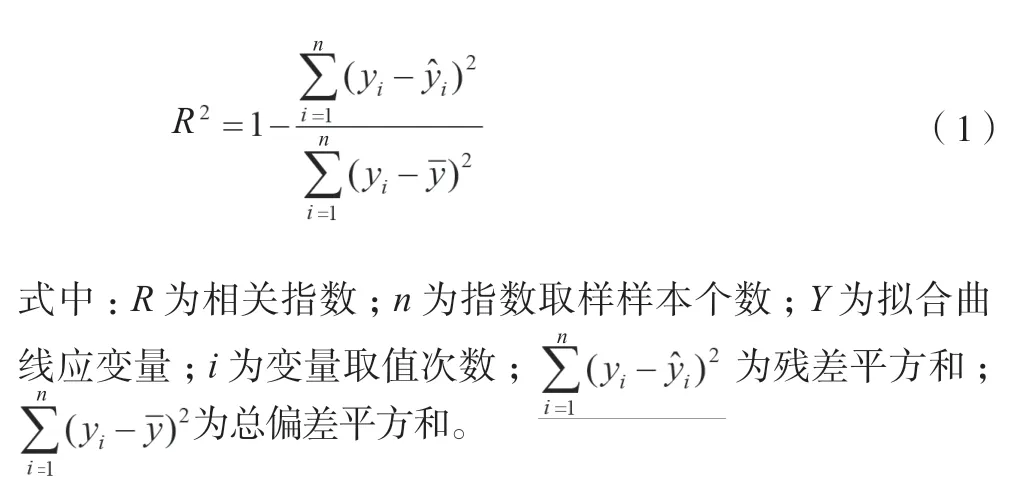
公式(1)为检验曲线的拟合程度,对于已经获取的样本数据来说,R2的实测值和拟合值为确定的数。因此,R2越大,就表示残差平方和越小,即模型的拟合效果越好;R2越小,就表示残差平方和越大,即模型的拟合效果越差。在线性回归模型中,R2表示解释变量对预报变量变化的贡献率。R2越接近1,表示回归的效果越好。该试验中R2=0.9998。经试验对比,发现三次样条曲线拟合的方式与点云数据的拟合效果比最小二乘曲线及多次样条曲线的拟合效果更好。因此,该文采用基于MATLAB 的三次样条曲线拟合方法获取样条曲线。
研究人员可以将测得的点云数据(三维模型)用拟合曲线来代替,每期都做同样的曲线拟合,再比较曲线上标靶点的三维坐标。从而得出点云数据中标靶点的变化量。例如,在拟合曲线y=f(x)中,每间隔1 cm 取x的变形点,就可以得到其每个变形点的变形,其中1、2 期的变形结果见表2。
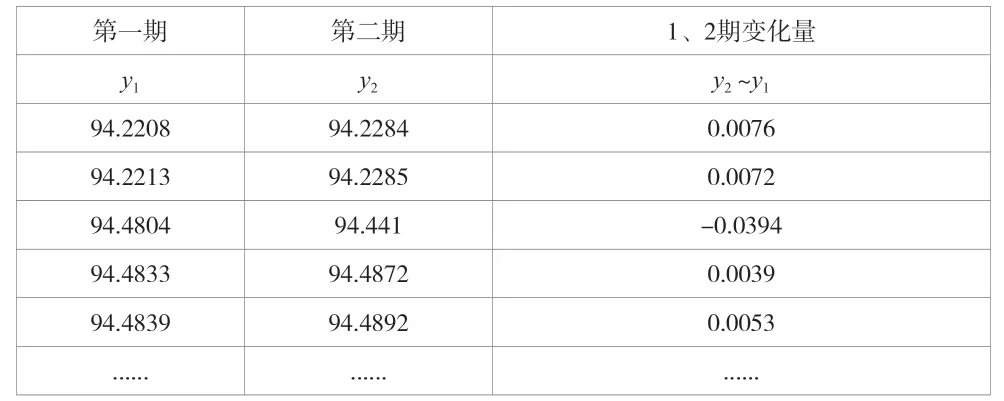
表2 利用曲线拟合得出1、2 期变化量
3 对三维激光扫描数据的精度评定
该实验采用的对比仪器为徕卡TS30(测量机器人),由于测量机器人的精度比三维激光扫描仪的测量精度高2 个数量级,因此,用TS30 测量的数据为真值数据,可以有效地分析出三维激光扫描仪的精度。
三维激光扫描仪与全站仪获得点位三维坐标的原理相同,它们的精度都受角度和距离误差的影响;另外三维激光扫描仪主要还受激光信号信噪比、周围噪声的强度、回波信号的强度以及外部环境等误差的影响,上述误差可以分为系统误差、偶然误差以及仪器固有误差[3]。
三维激光扫描仪和TS30 的精度可以分为内精度和外精度。内精度是指操作仪器时产生的人为误差;为了测量内精度,研究人员必须将三维激光扫描仪对中、整平后,首先监测J1、J2、J3(滑坡上的监测点)的三维坐标;其次,取下仪器重新对中、整平;最后,再次监测J1、J2、J3的三维坐标。为了计算其中的定向精度,研究人员将三维激光扫描对中、整平后,连续2 次测得J1、J2、J3的三维坐标。外精度是指仪器本身的误差,该试验利用高精度的TS30 用同样的方法连续2 次测量J1、J2、J3的三维坐标,以其测量结果作为检验标准,对三维激光扫描数据进行精度评定。
首先,用三维激光扫描仪对监测点J1、J2、J3进行2 次扫描,测得的差值结果见表3。
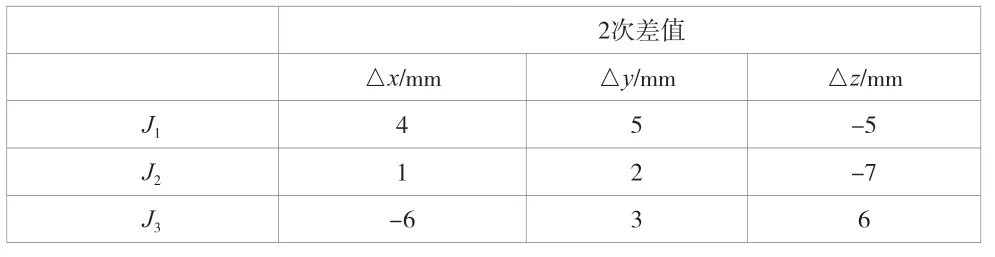
表3 三维激光扫描仪2 次差值的对比
其次,用TS30 对监测点J1、J2、J3进行定向测量,测得的差值结果见表4。
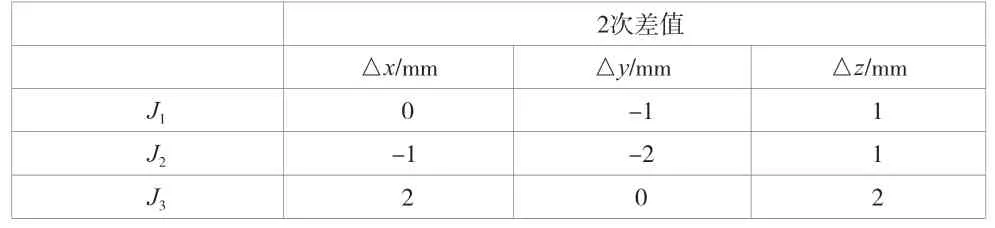
表4 TS302 次差值的对比
再次,用三维激光扫描仪和TS30 分别对监测点J1、J2、J3进行测量,测得的差值结果见表5。
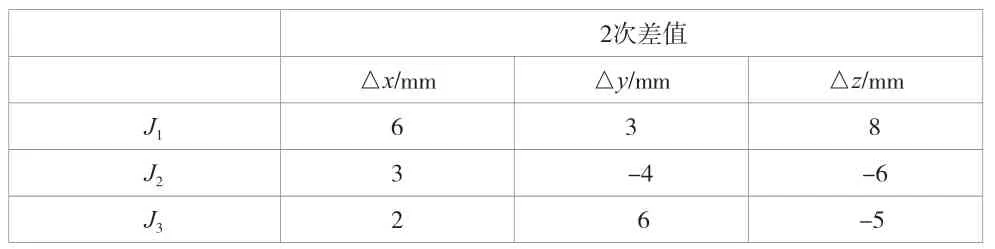
表5 三维激光扫描仪和TS30 2 次差值的对比
最后,计算在监测点J1、J2、J3取得数据的中误差,结果见表6。
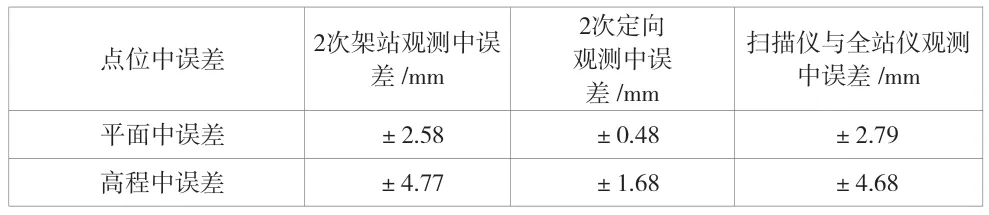
表6 中误差计算表
根据上述误差分析,2 次架站观测误差主要包括仪器量取误差、仪器对中误差、定向误差和部分系统误差;定向误差明显偏小,主要是消除了仪器量取误差、仪器对中误差和部分系统误差。由表6 可以看出,TS30 观测与扫描仪观测的数据精度和2 次架站观测的数据精度相差不大,因此,验证了三维激光扫描仪在滑坡变形监测上的可行性。
4 试验与分析
研究人员对在辽宁省某地进行的三维激光扫描数据进行试验。首先,对该地进行坡体扫描,获得各站测的三维点云数据;用RiSCAN_PRO 软件对所有数据进行点云数据的预处理;对各测站点的云数据进行后视定向操作之后,利用ICP 拼接功能进行点云数据的拼接,拼接效果如图1 所示。

图1 点云数据拼接效果图
其次,对预处理后的点云数据进行曲面重建,并从曲面中剖分出点云线,再选出标靶点。在RiSCAN_PRO 软件中切出的点云线,如图2 所示。
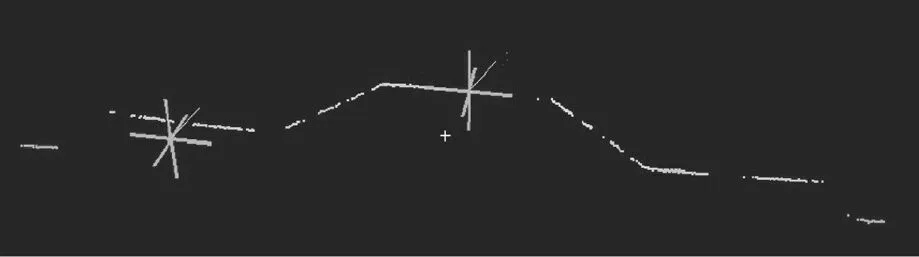
图2 剖出的点云线
再次,在RiSCAN_PRO 软件中,将点云线的三维坐标以txt 的格式导出,其结果如下。
再利用MATLAB 对导出的数据进行三次样条曲线拟合,得到的拟合图形如图3 所示。
最后,比较曲线上的点,每隔1 cm 取x方向的变形点得出点云数据的变化量,并将该变化量作为该变形点的变形,从而直观地得到点云数据的精度评定。再根据点位的位移变化量来分析坡体的变形情况。
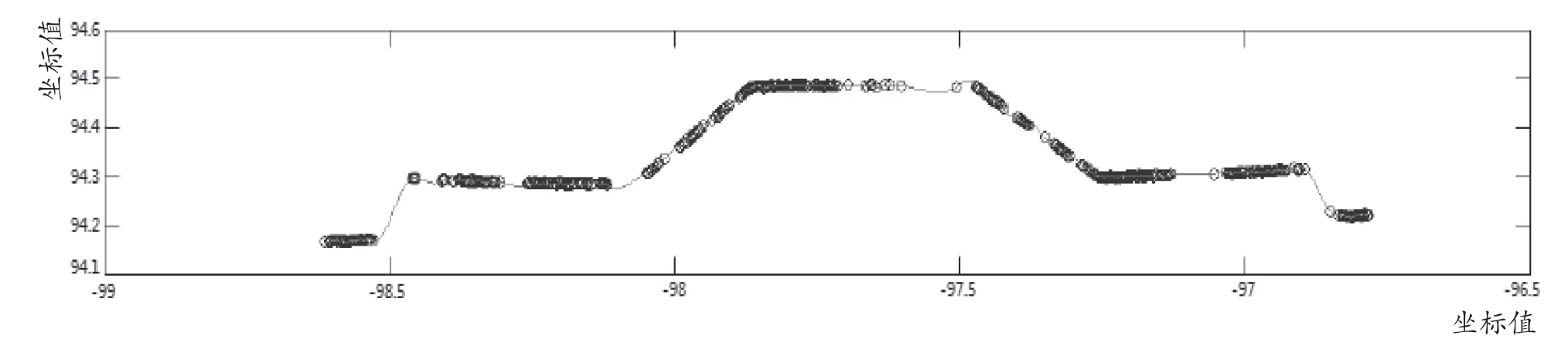
图3 三次样条拟合曲线
5 结语
根据该试验的结果,三维激光扫描数据可以通过剖析、分解数据再结合高精度仪器进行精度评定;MATLAB所做的只是曲线拟合,只能代替从曲面中剖出的点云线,最终目的是方便寻找同名点,从而计算同名点间的变化量。
TS30 的精度比普通全站仪高很多,经过改进后,其在自由设站中也可以满足对滑坡变形的监测需求。
在对三维激光扫描的数据处理中,三次样条拟合法具有很好的拟合效果,经过线形拟合,可以将离散的点线性化。研究人员可以对拟合曲线进行比较,从而获得点位的变化量,得到更好的分析结果。
该文在研究多源数据融合及精度分析中仍存在不足,其原因是目前对该地的监测期数不够充分,对三维激光扫描仪和TS30 的数据处理还需要进行进一步研究。
