复合式高速直升机过渡走廊和最优过渡路线研究
2021-02-03朱汉董睿江顺盛守照
朱汉,董睿,江顺,盛守照
(南京航空航天大学 自动化学院,江苏 南京 210016)
0 引言
复合式高速直升机既具备普通直升机的垂直起落、悬停、低空低速性能和良好的机动性等特点,又具备固定翼飞机的高速飞行能力,如图1所示的美国某公司推出的复合式共轴双旋翼高速直升机X2即为该构型的典型代表。
国内外主要针对复合式高速直升机气动弹性耦合、建模分析和飞行控制等方面进行了研究,但很少见到有关复合式高速直升机过渡飞行方案、过渡走廊和过渡路线方面的研究分析。文献[1]对复合式共轴直升机模型进行研究。文献[2]进行了复合式共轴直升机3种飞行模式下的配平计算,但是没有给出过渡过程的走廊曲线。文献[3]采用线性过渡和功率最小优化过渡两种过渡飞行方案对复合式共轴直升机过渡飞行过程的操纵策略进行了研究,也没有给出走廊曲线。文献[4]给出了一种倾转三旋翼无人机过渡转换的过渡策略,对过渡走廊曲线进行研究。文献[5]研究了倾转旋翼飞行器过渡走廊曲线的确定方法。文献[6]针对倾转旋翼飞行器在考虑约束的情况下,确定了发动机短舱倾转角度-速度包线。文献[7]针对倾转旋翼机用最优控制方法研究倾转旋翼机的最优动态倾转过渡过程,得到对应的操纵策略和飞行轨迹。文献[8]给出了一种倾转旋翼机过渡段走廊曲线的设计方法。

图1 X2高速直升机
本文针对复合式高速直升机在飞行模式转换过程中所存在的过驱动问题,通过研究其过渡走廊,设计基于最大安全裕度的复合式高速直升机的最优过渡路线并优化过渡飞行方案。
1 建模分析
1.1 机体部件气动模型
复合式高速直升机的主要部件包括一正一反旋转的共轴双旋翼、推进螺旋桨、机身(无机翼)、平尾(含升降舵)和垂尾(含方向舵)[9],本文主要分析共轴双旋翼以及推进螺旋桨的气动模型。
1) 旋翼气动模型
上、下旋翼纵向平面受力分析如图2所示,其入流计算模型分别为:
(1)
(2)
式中:δ1和δ2为共轴双旋翼的气动干扰因子,由共轴双旋翼干扰模型决定;v1和v2为共轴双旋翼的平均诱导速度;K1和K2为共轴双旋翼尾迹迎角的经验函数,其表达式为:
(3)
(4)
上、下旋翼尾迹倾斜角χ1、χ2的表达式分别为:
(5)
(6)
式中:μ1、μ2分别为上、下旋翼的前进比;λ1、λ2分别为上、下旋翼的入流比。
平均诱导速度与拉力的关系由动量理论给出,表达式为:
(7)
(8)
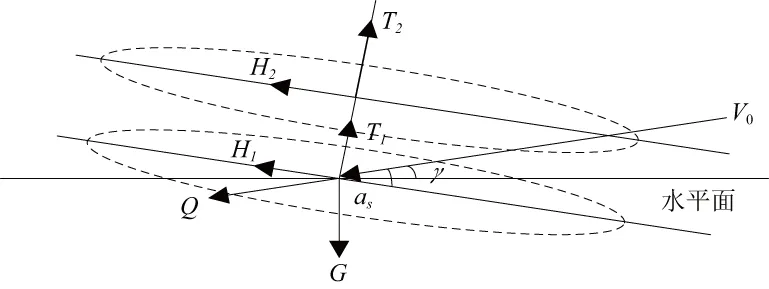
图2 旋翼纵向平面受力分析图
2)推进螺旋桨气动模型
推进螺旋桨拉力和转矩分别为:
(9)
式中:ρ为空气密度;Rp为推进螺旋桨桨叶半径;Ωp为推进旋翼转速;Ctp为推尾拉力系数;Cqkp为推尾反转矩系数。
1.2 整机全量动力学模型
将复合式高速直升机机身视为理想的刚体,定义直升机6个自由度分别为3个线速度Vx、Vy、Vz,3个角速度ωx、ωy、ωz。
可建立直升机的刚体运动方程组为:
(10)
绕质心转动的动力学方程为:
(11)
直升机姿态角与角速率之间的运动学关系为:
(12)
式中:m是全机质量;g是重力加速度;Fx、Fy、Fz和Mx、My、Mz分别为双旋翼、推进螺旋桨、机身、平尾和垂尾在复合式高速直升机质心处产生的气动合力和合力矩;φ、θ、ψ分别是机体滚转角、俯仰角和偏航角;Ixx、Iyy、Izz是机体质量对机体坐标系各轴的惯性积;Ixy是惯性积。
2 过渡走廊设计
2.1 飞行模式转换及操纵迁移
复合式高速直升机有直升机和固定翼两套操纵系统。两套操纵系统的操纵效率在不同的前飞速度和飞行模式下有所不同:在悬停和低速前飞时,处于直升机模式;在中等速度前飞时,处于过渡模式;在高速飞行时,处于固定翼飞机模式。
直升机模式时需要负俯仰角使得高速直升机产生一个向前的分力,从而加速前飞;在固定翼飞机模式下,升力主要由主浆盘面与空气相对运动所产生,此时希望保持平飞,使得主浆盘面可以产生足够升力。过渡模式是由直升机模式到固定翼飞机模式(或由固定翼飞机模式到直升机模式)的必经过程,过渡过程仅仅作为一个暂时状态,为简化分析,主要研究其纵向运动。图3为飞行模式转换图。
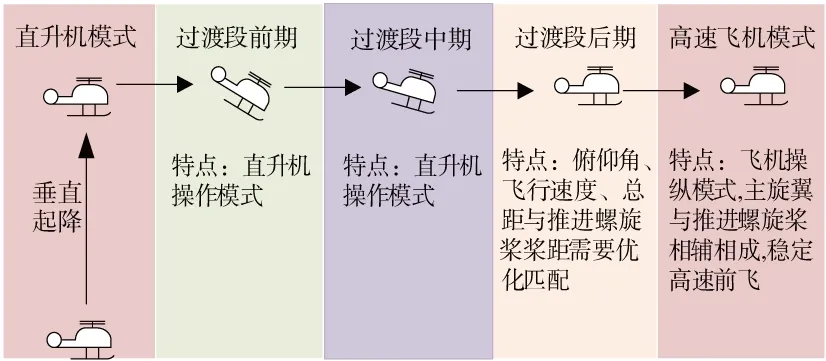
图3 飞行模式转换图
表1所示为过渡模式的纵向操纵迁移过程,整个纵向过渡段分为全直升机模式、直升机主导的混合模式、固定翼主导的混合模式和全飞机模式。横侧向进入姿态保持模式,操纵保持滚转平衡并跟踪预定的(直线)过渡轨迹。
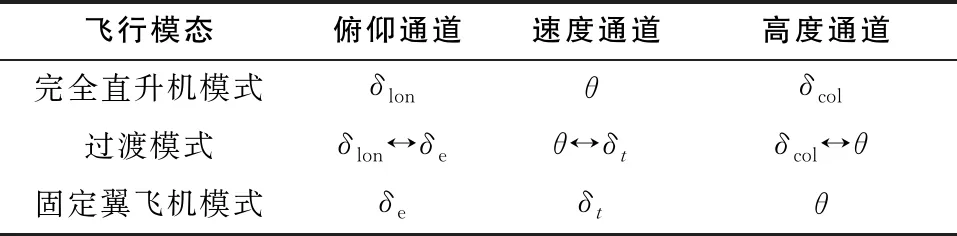
表1 过渡模式纵向操纵迁移
2.2 过渡走廊
过渡走廊[9]是直升机在任何时候都能够安全过渡飞行的通道。考虑到复合式高速直升机横侧向在过渡段进入姿态保持模式,而高度通道也进入保持模式,其过渡走廊主要由飞行速度、俯仰角、推进螺旋桨变距、纵向周期变距、升降舵和总距等组成,其中飞行速度和俯仰角对(V,θ)是独立的,推进螺旋桨变距、纵向周期变距、升降舵和总距是非独立的,推进螺旋桨变距主要用于飞行速度控制,纵向周期变距和升降舵用于俯仰姿态控制,总距用于保持高度控制。
基于过渡走廊的定义,直升机过渡飞行过程中,需要对直升机飞行速度和俯仰角加以分析:当俯仰角保持不变,若飞行速度过小,机身、平尾以及主浆盘面产生的升力不足以平衡重力;若飞行速度过大,导致主旋翼后行桨叶失速和前行桨叶激波,则主旋翼产生的升力不足以平衡直升机自身的重力。
对高速直升机的俯仰角变化做出规定以便建立安全的过渡走廊。本文规定:过渡飞行状态下复合式高速直升机的俯仰角小于失速俯仰角;邻近状态下的俯仰角变化小于一定范围,即
(13)
采用状态点分析的方法来确定高速直升机的安全过渡走廊。通过对模型进行分析,可以得到不同飞行速度和俯仰角时,高速直升机对应的状态量,结合上述规定可以得到复合式高速直升机的过渡飞行走廊(图4)。
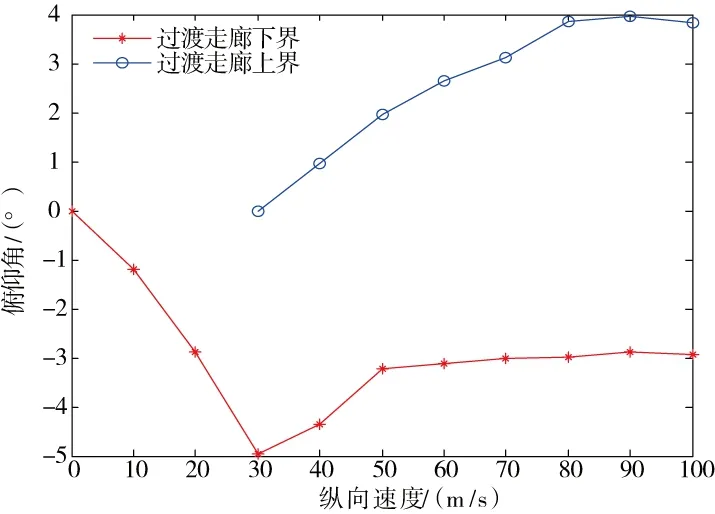
图4 过渡飞行走廊
理论上,得到高速直升机过渡走廊后,可以在过渡走廊范围内绘出无数条不同的飞行模式转换轨迹。
3 最优过渡路线设计
3.1 最优目标选择
在确定复合式高速直升机过渡走廊以后,需要在过渡走廊范围内选择一条最优的飞行模式转换轨迹。考虑到复合式高速直升机过渡过程最重要的是安全保障,因此本研究将优化目标设定为过渡走廊的最大安全裕度。这样复合式高速直升机在过渡段具有足够的安全范围,提高过渡过程的可靠性。

(14)
(15)
(16)
(17)
(18)
定义安全指标函数
(19)
优化目标为安全裕度最大,即目标函数
J=maxf(V,θ,δe,δlon,δt,δcol)
(20)
3.2 基于粒子群算法的最优过渡路线
采用粒子群优化算法[10]确定复合式高速直升机在过渡过程中的配平值,即以优化值作为配平方程组的唯一解,以此来解决操纵冗余问题。
粒子群优化算法将解非线性方程组的数值解问题转化为极大优化问题,以式(20)作为粒子的适应度评价函数。粒子群优化初始化为一组配平状态点,然后通过迭代得到最优解。粒子通过跟踪两个极值在迭代中更新自己。
粒子群优化的迭代公式为

(21)
(22)

粒子群优化算法主要计算步骤如下:

2) 计算粒子的适应度值J;

5) 检查结束条件:所有粒子的最优值小于给定误差ε,满足条件即结束寻优;不满足,则跳转至2)且k=k+1。
过渡段优化配平流程图如图5所示。
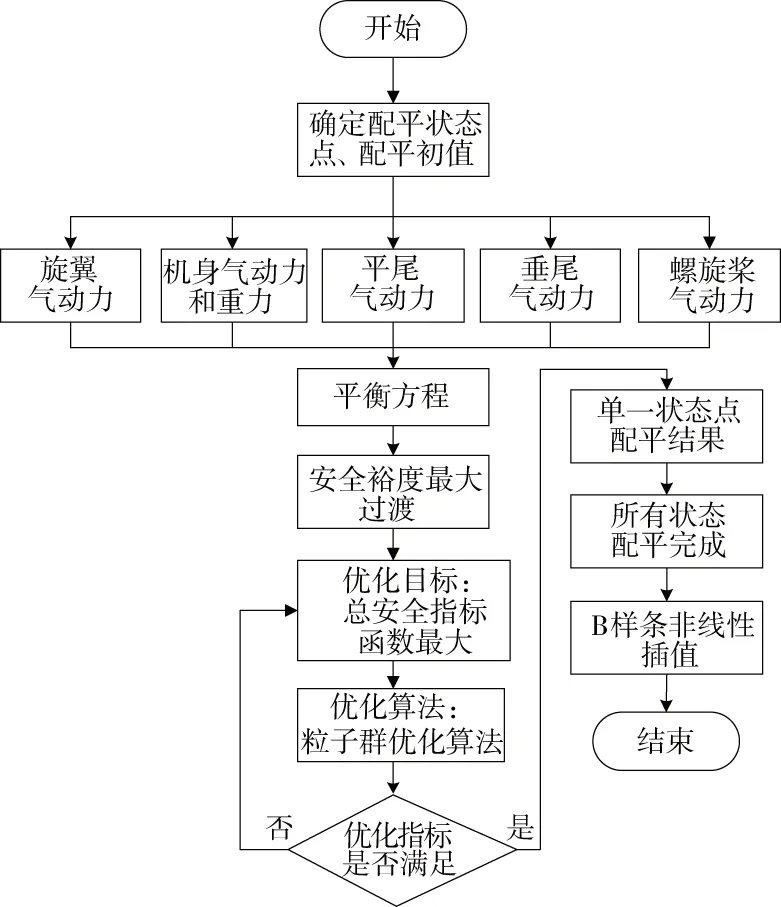
图5 过渡段优化配平流程图
4 仿真验证
最优过渡路线是基于过渡走廊和安全裕度最大确定的一条过渡路线。最优过渡路线规划模块输入为直升机的飞行速度、高度、垂向速度和俯仰角,输出为8个执行机构(全动平尾、横向周期变距、纵向周期变距、推进式螺旋桨、差动平尾、差动总距、方向舵、俯仰角和全动总距)的配平量和俯仰角的配平量。
以美国某公司研制的时速高达259英里(约合417 km/h)的复合式共轴刚性双旋翼高速直升机为例,基本参数如表2-表4所示。
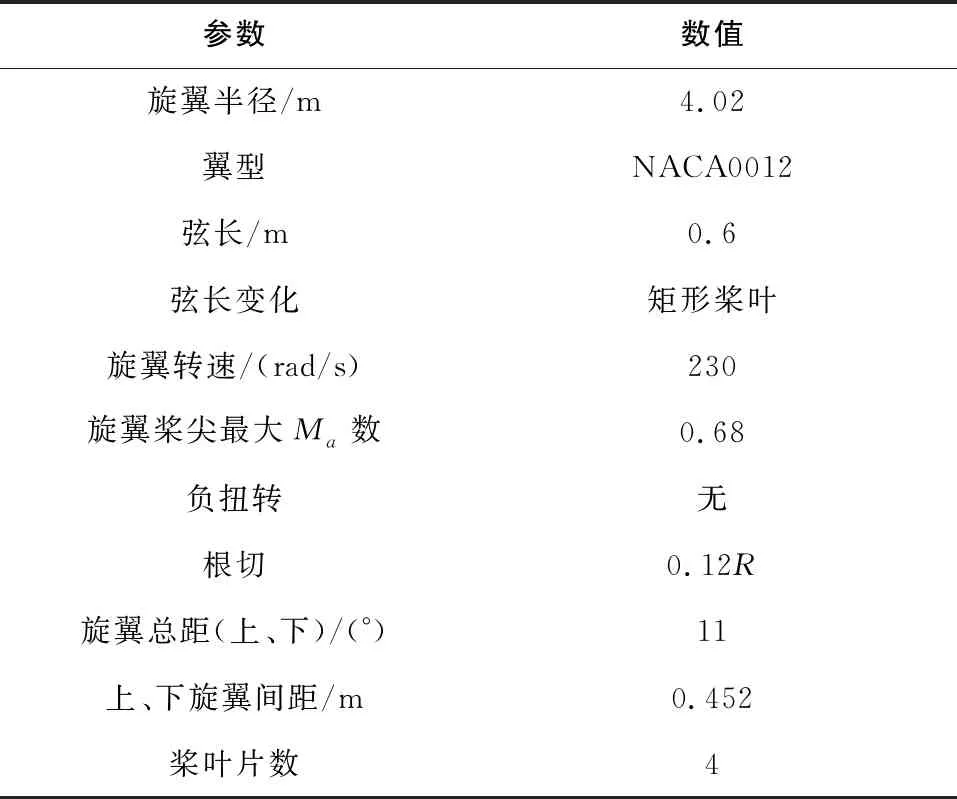
表2 复合式高速直升机旋翼基本参数
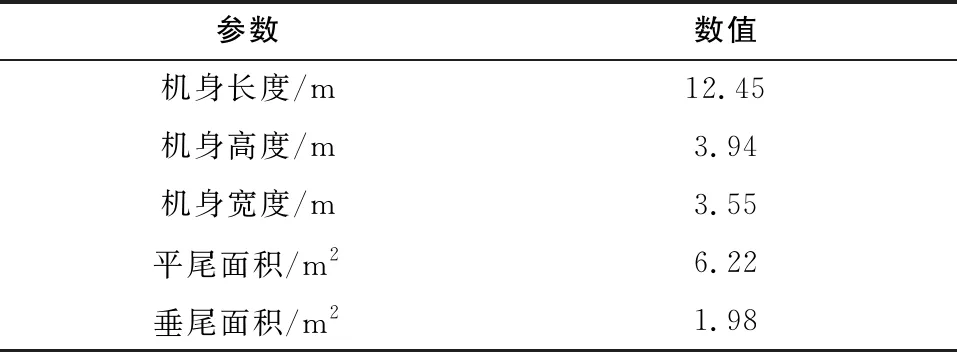
表3 复合式高速直升机机身几何参数

表4 复合式高速直升机整机参数
仿真得到过渡段的最优过渡路线以及操纵和姿态对速度的变化规律,如图6-图8所示。
以直升机模式向飞机模式转换为例,图6为最优过渡路线,图7和图8为过渡飞行模态下纵向通道操纵量随着速度增加的变化趋势。当飞行速度较低时,复合式高速直升机处于直升机模式,产生负俯仰角低头前飞,此时俯仰姿态是由纵向周期变距δlon控制,速度由俯仰角θ控制,并通过控制总距δcol实现高度保持。当飞行速度达到过渡起点速度时,升降舵δe具有一定的舵效,此时纵向周期变距δlon逐步改出,升降舵δe随着飞行速度的增加不断改入;同时在速度控制回路加入尾推螺旋桨距δt控制,高度保持依然通过控制总距δcol实现。当俯仰角θ达到纵向模式切换点后,俯仰角θ参与到高度控制,并完全退出速度控制回路,此时总距δcol逐步改出,直到过渡完毕高度控制全部通过控制俯仰角θ实现。
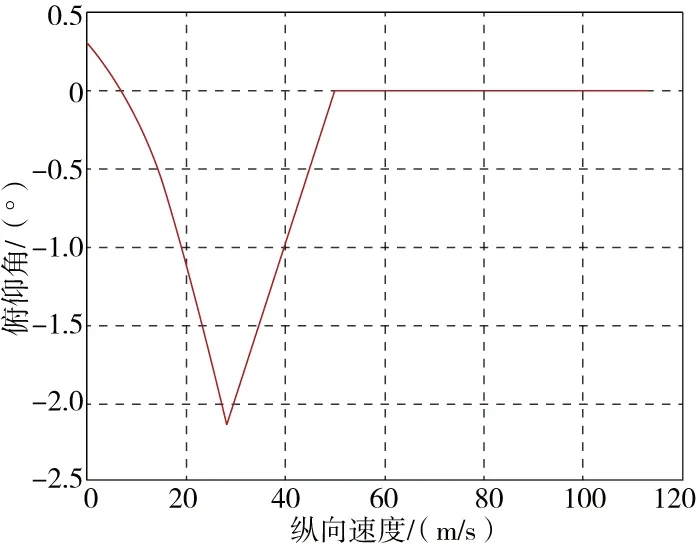
图6 最优过渡路线

图7 纵向周期变距δlon和升降舵δe对速度的变化规律
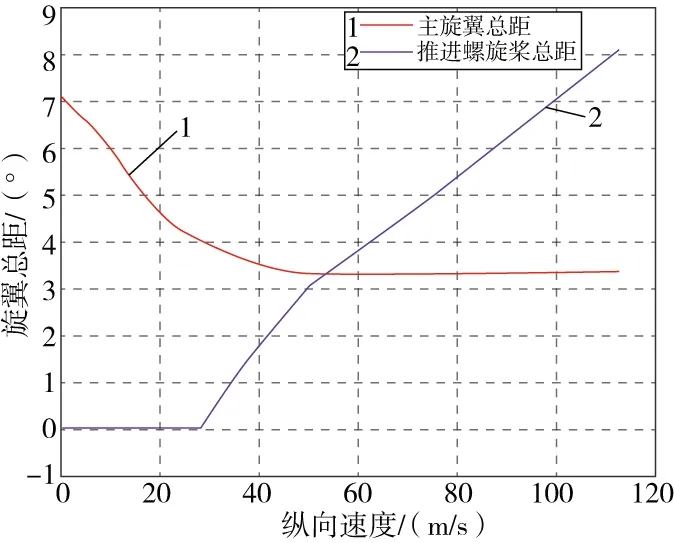
图8 总距δcol和推进螺旋桨总距δt对速度的变化规律
5 结语
复合式高速直升机从直升机模式转换到固定翼飞机模式的过程中,存在操纵冗余和升力匹配问题,导致过渡过程的操纵分配相当复杂。本研究对高速直升机进行了过渡模式下的配平,获得约束条件下的过渡走廊,采用安全裕度最大优化过渡路线,得到了过渡飞行过程中操纵和姿态对速度的变化规律。仿真结果表明:最优过渡路线能确保高速直升机在飞行模式转换过程中合理地分配各操纵量;有效解决了操纵冗余问题,并确保了模式转换的安全性。
