人字齿轮小轮轴向窜动的多目标复合修形优化
2021-02-01刘玄方宗德赵宁郭辉沈云波
刘玄,方宗德,赵宁,郭辉,沈云波
(1.西北工业大学机电学院,710072,西安;2.西安工业大学机电工程学院,710021,西安)
人字齿轮由两个螺旋角相同、旋向相反的斜齿轮组成,具有啮合平稳、结构紧凑、承载能力大、自平衡轴向力等特点,在直升机分扭传动构型中作为末级传动被广泛应用[1-3]。但是,人字齿轮啮合刚度大,左右两侧斜齿轮齿面对称性和精度控制比较困难,同时齿轮传动系统,包括轴系、轴承和箱体的变形难以避免[4]。因此,两对斜齿轮传动时左右载荷不完全对称,一方面产生齿面偏载,在偏载较严重时又易引起齿面胶合失效现象[5],另一方面产生振动,极大地影响直升机动力传动系统的可靠性和使用寿命。
王成等建立了人字齿轮的承载接触分析(LTCA)模型,通过理论和试验结果比较了不同工况下轴向位移的大小[6-8]。蒋进科等将人字齿轮的修形视为一半扭矩、一端齿面下的斜齿轮修形,分析了轴弯曲变形和扭转变形对齿面偏载的影响[9];赵宁等对高重合度人字齿轮的传动性能进行多目标优化,对比了优化前后的齿面啮合印痕,并对优化前后的两组齿轮进行了噪音检测试验[10];杨硕文等考虑轴线平行度偏差和转矩等因素的影响,基于KISSsoft软件研究了人字齿轮齿廓和齿向修形参数的设计[11];蒋进科等对人字齿轮左右齿面采用不同的齿向修形参数,以承载传动误差幅值、轴向力和振动加速度最小为目标,采用粒子群算法确定了最佳修形齿面[12];Kang等通过试验测量了齿面修形前后人字齿轮副的轴向振动位移[13];Yuan等研究了宽斜齿轮不同支承布局方式对齿面啮合错位量和齿面载荷分布的影响[14];甘来等针对螺旋锥齿轮重载下热胶合失效问题,基于有限元的热分析方法,研究了轮齿啮合过程中的闪温变化[15];贾超等研究了无误差角和有误差角两种情况下,齿面三维修形对承载传动误差、齿面闪温和齿面载荷分布的影响[16]。
本文研究了人字齿轮小轮轴向固定和轴向窜动对左右齿面载荷分布和齿面接触印痕的影响。首先,通过小轮轴向窜动和齿向补偿修形优化实现左右齿面载荷的均匀分布。其次,将齿向补偿修形量和拓扑修形量叠加作为复合修形量,以承载传动误差幅值最小和齿面最大闪温最低为优化目标,采用NSGA-II算法确定最佳拓扑修形量。本文复合修形设计方法对人字齿轮修形技术在直升机传动系统中的应用具有一定的理论指导意义。
1 人字齿轮LTCA模型和修形设计
1.1 承载接触分析
人字齿轮承载接触分析模型如图1所示,图形为沿接触椭圆长轴方向的横截面。假设左右斜齿轮副分别有两对齿Ⅰ、Ⅱ以及Ⅲ、Ⅳ同时接触,具体的数学模型文献[6-9]中有详细介绍,本文不再赘述。

图1 人字齿轮承载接触分析模型
由人字齿轮LTCA模型可求得左、右啮合齿对间的轴向力差值为
(1)
式中:αjk为法向载荷与轴向的夹角,可通过轮齿几何接触分析(TCA)得到;pjk为瞬时接触椭圆长轴上的离散点载荷。
人字齿轮一个啮合周期分为5等分,若左右两端轴向力差值Fzi(i=1,…,5)在允许的范围内,则认为左右两侧斜齿轮副载荷相等,计算得到的窜动量即为该啮合位置的轴向窜动量。需要说明的是,以往在用黄金分割法求解轴向窜动量时往往存在窜动时间过长的问题,究其原因一是窜动方向不正确,二是窜动步长需根据实际情况反复调整。本文根据每个啮合位置初始迭代时人字齿轮左右两端轴向力差值变小、变大、变化不明显3种情况来判断小轮轴向窜动方向,尤其是轴向力差值变化不明显时需要细致划分窜动步长因子,以便于快速找到黄金分割法的上下临界点,进而求出每个啮合位置的轴向窜动量,具体流程图如图2所示,图中P为法向总载荷。

图2 黄金分割法求解轴向窜动量
1.2 齿向补偿修形
齿轮传动系统受载后轴系、轴承及箱体都会产生支撑变形,支撑变形引起左右齿面间隙变化,造成齿面偏载。小轮轴向窜动能够使左右斜齿轮副载荷基本相等,但不能完全改善单个斜齿轮齿面偏载的状况。因此,有必要在小轮轴向窜动时,进一步对其进行齿向补偿修形,齿向补偿修形时左右两侧斜齿轮修形方式不同。
图3表示人字齿轮副齿面偏载及齿向补偿修形的4种方式,箭头方向为偏载方向,椭圆表示载荷所处位置,yL和yR表示齿向两端最大修形量。支撑变形的存在使得左右斜齿轮副间隙不一样,间隙小的地方齿面载荷大,间隙大的地方齿面载荷小,造成齿面偏载。齿向补偿修形的核心思路就是根据齿面偏载情况,在间隙小的地方采用较大修形量,在间隙大的地方采用较小修形量,通过修形量补偿左右齿面间隙的差异,达到齿面均载的目的。
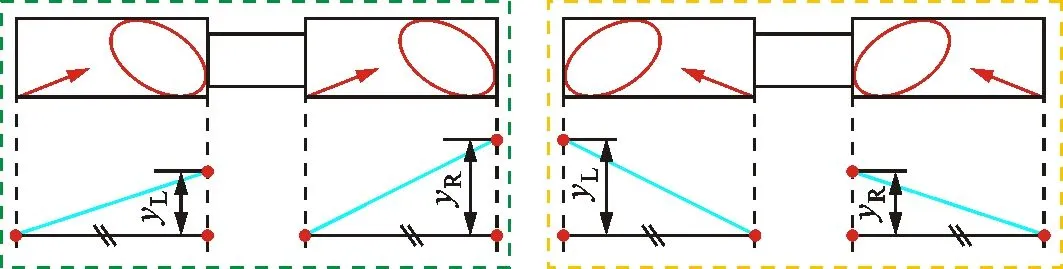
(a)偏载及修形方式1 (b)偏载及修形方式2

(c)偏载及修形方式3 (d)偏载及修形方式4图3 齿面偏载及齿向补偿修形方式
1.3 拓扑修形
拓扑修形时左右两侧斜齿轮修形方式相同。修形曲线如图4所示,由两段二次抛物线和一段直线组成。图中y1和y3为齿根的最大修形量和修形长度;y2和y4为齿顶的最大修形量和修形长度;y5、y6为齿向两端最大修形量;y7为齿向不修形区域长度;s1、s2、s3、s4为修形点的位置坐标;h和b分别为有效齿高和齿长。

(a)齿廓修形(b)齿向修形图4 齿轮拓扑修形曲线
1.4 复合修形曲面
将齿向补偿修形量和拓扑修形量两者叠加即为复合修形齿面的修形量。
首先根据修形曲线计算网格节点的修形量δ,通过三次B样条对节点数据拟合得到光滑的修形曲面。旋转投影面与小轮理论齿面关系如下式
(2)
式中:r1x、r1y、r1z分别为理论齿面位置矢量的坐标分量。
理论齿面与修形量曲面叠加得到修形齿面,其位矢和法矢可表示为
(3)
式中:R1(u1,l1)和n1(u1,l1)分别为理论齿面的位矢和法矢;u1和l1为齿面参数;R1r(u1,l1)和n1r(u1,l1)分别为修形齿面的位矢和法矢。
2 修形优化模型
2.1 齿向补偿修形优化模型
根据人字齿轮LTCA模型可求得接触线上离散点载荷密度
(4)
式中:Li,j为第i条接触线上第j个点的位置坐标;pij为接触点载荷;n为接触线上离散点数;m为接触线数。
齿轮啮合过程中由于瞬时接触齿对齿面总载荷始终保持不变,所以保证左右齿面最大载荷密度最小,左右齿面载荷自然会均匀。齿向补偿修形的优化模型可表示为
(5)
式中:P10和P20为修形前左右齿面载荷密度;P1和P2为修形后左右齿面载荷密度;yL、yR为优化变量;qmin、qmax为修形量最小值和最大值。
2.2 拓扑修形优化模型
齿轮静态承载传动误差幅值是齿轮传动系统产生振动和噪声的主要因素。人字齿轮副承载传动误差LTE和承载传动误差幅值ALTE可分别表示为
LTE=3 600×180Z/πrb2cosβb
(6)
ALTE=max(LTE)-min(LTE)
(7)
式中:rb2和βb分别为大轮基圆半径和基圆螺旋角;Z为LTCA求得的轮齿变形后的法向位移。
根据ISO标准给出的圆柱齿轮Blok闪温公式,齿面接触点的闪温[17]可表示为
Tf=
(8)
式中:vg1、vg2为小、大轮在啮合点处的切向速度,bH为接触椭圆短半轴长度,均可通过人字齿轮TCA和LTCA技术求出;XJ为啮入系数;XΓ为载荷系数;μm为平衡摩擦系数;BM1、BM2为大小齿轮的热接触系数。
拓扑修形设计的优化模型可表示为
(9)
式中:F10和F20为修形前的承载传动误差幅值和齿面最大闪温;F1、F2为修形后的承载传动误差幅值和齿面最大闪温;yi(i=1,…,7)为优化变量;Qmin、Qmax为修形量最小值和最大值;lmin、lmax为修形长度最小值和最大值。
2.3 优化方法
由于本文目标函数为人字齿轮副TCA和LTCA计算结果,目标函数与优化变量之间无法直接建立精确的解析表达式,且在优化解空间内存在多个局部最优解,无法采用传统的优化算法。NSGA-II算法采用快速非支配排序算法和拥挤距离比较算子,同时引入精英策略,计算复杂度低,计算效率高,因此本文使用其求解上述优化模型[18]。
3 算例与分析
本文齿轮副参数如表1所示,大轮负载扭矩为2 000 N·m,输入转速为3 500 r/min,齿轮本体温度为70 ℃,润滑油的环境黏度为0.02 Pa·s,润滑油黏压系数为11.4 GPa-1。

表1 齿轮副参数
考虑支撑变形时,支撑变形引起水平面内轴夹角、垂直平面内轴夹角和中心距变化。研究结果表明,水平面内轴夹角误差Δγ对齿面接触状况的影响最大[19-20],此处Δγ是支撑变形和随机安装误差综合作用的结果,因此本文仅分析水平面内轴夹角误差的影响。在人字齿轮小轮轴向固定和轴向窜动两种情况下,Δγ分别为0°、0.000 83°、0.001 67°、0.002 50°和0.003 33°时,齿面接触印痕和左右齿面载荷分布分别如图5和图6所示。
由图5a、5b可知,不考虑支撑变形(Δγ=0°)时,人字齿轮副左右齿面载荷相等且均匀分布,齿面接触印痕在节圆附近。Δγ=0°时,人字齿轮小轮轴向窜动与小轮轴向固定时仿真结果相同。考虑支撑变形时,由图5c~5j可知,当小轮轴向固定时,随着轴夹角误差增大,左齿面载荷越来越大,右齿面载荷越来越小,载荷朝一侧偏载越来越严重,且小轮齿面接触印痕朝齿根移动。当小轮轴向窜动时,通过两端斜齿轮轴向力相等自动确定轴向位置,由于轴向窜动改变了左右齿面的间隙,使得左右斜齿轮副载荷基本相等(见图6)。但是,对比图5c~5j和图6a~6h可知,小轮轴向固定和轴向窜动时齿面接触印痕基本相同,即小轮轴向窜动并没有改变齿面接触印痕。

(a)Δγ=0°时齿面接触印痕(b)Δγ=0°时齿面载荷分布

(c)Δγ=0.000 83°时齿面接触印痕(d)Δγ=0.000 83°时齿面载荷分布

(e)Δγ=0.001 67°时齿面接触印痕(f)Δγ=0.001 67°时齿面载荷分布

(g)Δγ=0.002 50°时齿面接触印痕(h)Δγ=0.002 50°时齿面载荷分布

(i)Δγ=0.003 33°时齿面接触印痕(j)Δγ=0.003 33°时齿面载荷分布图5 小轮轴向固定时左右齿面接触印痕及齿面载荷分布

(a)Δγ=0.000 83°时齿面接触印痕(b)Δγ=0.000 83°时齿面载荷分布

(c)Δγ=0.001 67°时齿面接触印痕(d)Δγ=0.001 67°时齿面载荷分布

不同误差下小轮轴向窜动时的轴向窜动量见表2,可知随着轴夹角误差增大轴向窜动量逐渐增大。对比小轮轴向固定和轴向窜动时左右齿面最大载荷密度和左右齿面载荷分配系数可知,小轮轴向窜动后左右齿面最大载荷密度基本相等(见表3),但左右齿面载荷分配系数仍有差异(见图7、图8),表明小轮轴向窜动虽然可使左右斜齿轮副载荷基本相等,但是不能完全改善单个斜齿轮齿面载荷分布。

表2 不同误差下小轮轴向窜动量

表3 左右齿面最大载荷密度

图7 小轮轴向固定时左右齿面载荷分配系数

图8 小轮轴向窜动时左右齿面载荷分配系数
图9所示为水平面内轴夹角误差Δγ=0.009 17°时齿向补偿修形后齿面接触印痕及齿面载荷分布,修形方式见图3b所示,优化后修形参数yL=9.15 μm,yR=5.69 μm。由图9a、9b可知,当Δγ=0.009 17°时,小轮齿面接触印痕已经基本到达有效齿面的边界,此时仅靠小轮轴向窜动虽然能够平衡左右斜齿轮副的载荷,但单个斜齿轮齿面载荷明显不同,即小轮轴向窜动不能完全改善单个斜齿轮齿面偏载的状况。对比图9c、9d可知,结合小轮轴向窜动并进一步通过齿向补偿修形后,不仅使得左右斜齿轮副载荷基本相等,而且改善了每一个斜齿轮齿面的载荷分布,同时小轮齿面接触印痕向节圆附近移动。

(a)仅小轮轴向窜动时齿面接触印痕

(b)仅小轮轴向窜动时齿面载荷分布

(c)齿向补偿修形时齿面接触印痕

(d)齿向补偿修形时齿面载荷分布图9 齿向补偿修形后齿面接触印痕及齿面载荷分布
拓扑修形优化后的修形参数为y1=11.69 μm,y2=20.01 μm,y3=0.64 mm,y4=2.23 mm,y5=10.98 μm,y6=10.98 μm,y7=12.64 mm。复合修形曲线如图10所示,复合修形后啮入点和啮出点发生转移,避免了边缘接触且左右齿面载荷向中部集中如图11所示。复合修形前后承载传动误差幅值如图12所示,齿面最大闪温如图13所示,复合修形后由于修形量补偿了三齿、两齿啮合区之间变形量的差异,轮齿在啮合转换点处能够平稳过渡,因此承载传动误差幅值大幅下降。同时复合修形后轮齿啮入、啮出端修形量较大,啮入、啮出端间隙增大,负载减小,油膜厚度增大,齿面润滑状态得到改善,所以齿面最大闪温降低。

(a)左侧斜齿轮修形 (b)右侧斜齿轮修形图10 复合修形曲线

(b)齿面载荷分布图11 复合修形后齿面接触印痕及齿面载荷分布

图12 复合修形前后承载传动误差幅值

图13 复合修形前后齿面最大闪温
4 结 论
针对人字齿轮左右两侧齿面对称性和精度控制比较困难,造成左右齿面载荷不完全对称易产生齿面偏载和振动的问题,提出了一种人字齿轮复合修形设计方法,研究了小轮轴向窜动和修形对左右齿面载荷分布的影响,得到以下结论:
(1)虽然人字齿轮小轮轴向窜动能使左右斜齿轮副载荷基本相等,但不能完全改善单个斜齿轮齿面偏载状况,且不会改变齿面接触印痕。
(2)轴向窜动结合齿向补偿修形,不仅能够使左右斜齿轮副载荷基本相等,而且能够改善每一个斜齿轮齿面的载荷分布,使齿面接触印痕向节圆靠近。
(3)复合修形在改善齿面载荷分布的同时能够大幅降低承载传动误差幅值和齿面最大闪温,进而提高人字齿轮副的啮合性能。
