基于物联网感知的草莓采摘机器人设计
2021-01-27李泽宇解迎刚曹满鑫张子轩
李泽宇,解迎刚,曹满鑫,罗 萌,张子轩
(北京信息科技大学 信息与通信工程学院,北京 100101)
0 引 言
据不完全统计,全世界草莓总产量约为5 000万吨/年,而我国则占到了约700万吨/年。草莓采摘作业是当前果蔬生产过程中比较费时和费力的环节。目前,草莓采摘主要依赖于人工作业,由果农直接将草莓从植株上采摘下来。然而人工采摘作业存在成本偏高、劳动强度大、采摘不及时等弊端。同时,当前我国人口老龄化现象较严重,农业劳动人口骤减。而随着自动化技术的发展,自动采摘作业将逐渐代替人类进行作业,可以大大降低采摘人员的劳动强度。因此,进行草莓采摘作业自动化的研究对于社会具有重要的现实意义。
然而,草莓的大小和颜色呈现非规则、非一致等特性,其生长环境的复杂性和农田环境的非结构化等特点共同决定了采摘设备的开发有一定的难度;而且由于草莓果实生长环境复杂,加之草莓果实生长密集,果实之间的遮挡问题很严重,给图像处理带来许多困难。虽然目前已有学者进行基于机器视觉方面的研究,但目前大多停留在某一方面理论层次的研究,如单纯的双目定位、机械手采摘路径优化等,而进行实际应用开发的研究很少。当前极个别的物化的应用研究均利用了基于PC上位机的OpenCV,即首先利用计算机视觉库进行图像处理,然后进一步通过控制采摘机械手对果实进行采摘。此举导致采摘设备开发成本高、体积大和功耗高,给自动化采摘作业的推广应用带来新问题。
针对上述问题,本文设计了一套基于DSP的低功耗、小体积、低成本的草莓采摘机器人。实践表明,该机器人对提高草莓采摘劳动生产率、降低农民的劳动强度和采摘成本,提高我国精准农业设施的现代化和智能化水平、加快农业科学进步具有重要的现实意义。
1 系统设计
本文设计的采摘机器人主要包括上位机模块和下位机模块。
上位机模块主要包括:TMS320DM642图像处理模块、图像采集模块、视频解码模块、电源模块、视频编码模块、显示模块和串行通信模块等。
下位机模块主要包括:STM32F103主控模块、电源模块、串行通信模块、三维滑台、采摘机械手、传感器模块、滑台驱动器、舵机驱动器和灯光补偿模块等。
上位机和下位机主要通过RS 232串行通信模块进行数据传输。上位机中的图像采集模块采集待采摘区域的图像后,通过视频解码模块将视频的模拟信号转换为数字信号送入TMS320DM642图像处理模块。TMS320DM642图像处理模块一方面通过对数字信号进行处理和分析,实现对草莓果实进行提取轮廓、形心位置确定、立体匹配和计算草莓果实的三维空间坐标等处理和将计算后的数字信号传输至视频编码模块。视频编码模块将处理后的草莓果实图像再次转换为模拟信号并送至显示器进行显示,以便开发人员调试。另一方面,TMS320DM642图像处理模块将计算出的草莓果实的空间三维坐标的数据通过串行通信发送至下位机STM32F103主控模块。在这个过程中,电源模块为上位机子模块提供电能。
下位机中的STM32F103主控模块通过串行通信口接收到来自TMS320DM642发送的草莓果实三维空间坐标数据后提取坐标的有效值;然后通过滑台驱动器驱动三维滑台运动至带采摘草莓果实的正前方位置;之后,STM32F103主控模块控制舵机驱动器驱动采摘机械手对草莓果实进行准确抓取和采摘;最后将草莓果实送入集果箱中。在下位机工作过程中,电源模块为下位机系统提供电能,同时碰撞传感器和触碰传感器实时检测三维滑台是否到达端点,触碰传感器实时检测采摘机械手在对草莓果实进行抓取时,机械手的两个手掌是否已经接触到草莓果实。灯光补偿模块能够使使TMS320DM642图像处理模块更好地对外界图像进行处理,减少外界光源对系统的干扰。
本文设计的草莓采摘机器人的整体结构框图如图1所示。
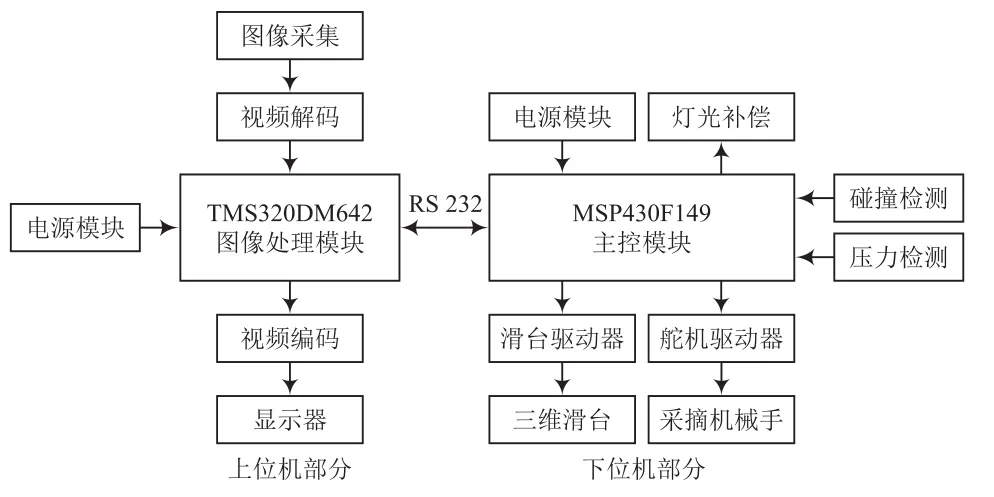
图1 草莓采摘机器人的整体结构框图
基于图像处理的采摘机器人的设计流程如图2所示。主要步骤包括上下位机的硬件搭建、双目摄像机内外参数的标定等。其中,硬件搭建还包括DSP与STM32F103之间的串行通信,数字图像采集还包括将采集的模拟信号转换为数字信号送入DSP中。
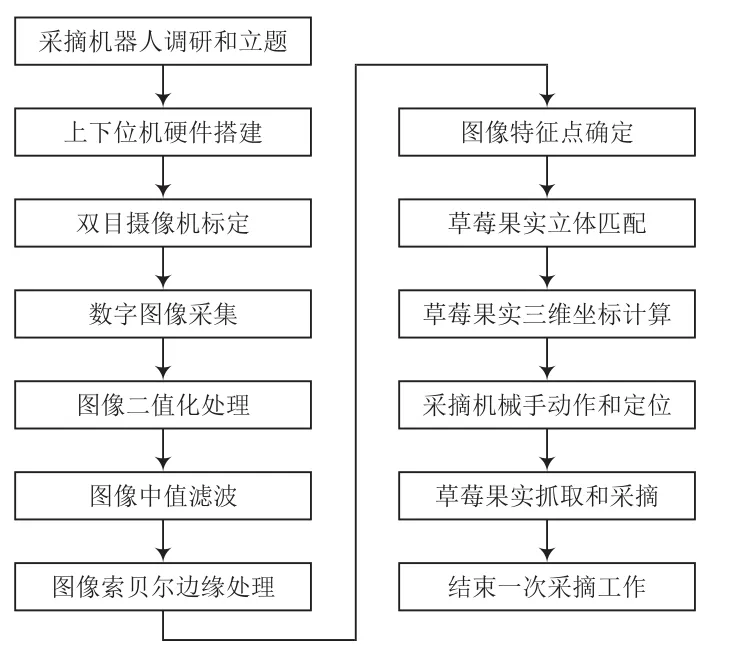
图2 基于图像处理的采摘机器人的设计流程
2 实验结果
本设计通过使用DSP代替原有的需要依赖OpenCV进行图像处理的计算机,利用低成本、小体积的数字信号处理器实现了双目摄像机图像采集。
本设计完成的主要工作有:
(1)进行了系统整体的硬件方案的选择和设计;
(2)通过VC实现了对双目摄像机进行内部参数的获取和校正;
(3)利用DSP控制双目摄像机进行双路视频采集并对采集的图像进行了阈值分割、索贝尔边缘处理、中值滤波等操作,并通过处理后的图像找到了形心;
(4)实现了利用DSP对特征点的简单匹配及三维重建处理,并能简单的进行三维坐标的计算和将计算结果输送至控制器;
(5)实现了DSP与控制器之间的通信,下位机能根据通信数据实现对三维滑台和机械手的控制;
(6)实现了DSP和控制器能协调工作,完成对某一区域内草莓的采摘工作。
本系统在选型的时候就考虑到了农业工作环境的复杂性,并且尽可能提高系统的稳定性能和工作效率。
3 结 语
本文针对现有草莓采摘设备存在开发成本高、体积大和功耗高等问题,设计了一套基于DSP的草莓采摘机器人。实验结果表明,该设计达到了预期目标,其对提高草莓采摘率,降低农民的劳动强度和采摘成本,提高我国精准农业设施的现代化和智能化水平,加快农业科学进步具有重要的现实意义。
