基于虚拟仿真技术的1+X证书考核内容设计
2021-01-13凌旭王云军戴俊良
凌旭 王云军 戴俊良





摘 要 随着1+X证书制度试点的开展,国家相继发布工业机器人相关四个职业技能等级证书,然而每个证书都对应一套考核设备且费用较高。利用虚拟仿真技术模拟X证书考核内容,有利于教学的开展。通过对工业机器人工作站及零件进行三维实体建模以及工作站整体布局,运用Smart组件和虚拟示教器等技术,对工业机器人、变位机与快换手抓添加子对象组件及其属性,并创建快换手抓、变位机与虚拟示教器之间的I/O控制,添加各个组件之间的工作站逻辑,实现对机器人工作站的离线编程仿真。通过运用虚拟仿真技术,解决设备短缺难题,同时有助于提高X证书通过率。
关键词 1+X证书;工业机器人;虚拟仿真;三维建模
中图分类号:G434 文献标识码:B
文章编号:1671-489X(2021)20-0033-04
Application of Virtual Simulation Technology in 1+X Certificate Examination Content//LING Xu, WANG Yunjun, DAI Junliang
Abstract With the development of 1 + X certificate system pilot, the
state has issued four vocational skill level certificates related to industrial robots, however, each certificate corresponds to a set of assessment equipment and the cost is high. Therefore, the use of virtual simulation technology to simulate the content of X certificate assessment is conducive to the development of teaching. Through 3D solid modeling and overall layout of industrial robot workstation and parts, smart components and virtual teaching device are used to add sub object components and their attributes to industrial robot, positioner and quick-change gripper. I / O control between quick change gripper, positioner and virtual teaching device is created, and workstation logic between each component is added to realize the off-line programming simulation of robot workstation. The virtual simulation technology can solve the problem of equipment shortage and improve the passing rate of X certificate.
Key words “1+X” certificate; industrial robot; virtual simulation; 3D modeling
0 前言
2019年伊始,国务院印发《国家职业教育改革实施方案》,标志着新一轮职业教育改革的开启。1+X证书制度的试点与运行,标志着职业教育探索新型职业技能等级证书制度模式的开始[1-3]。将X技能等级证书的考核要求融入职业教育教学中去,新的X证书考核制度的推出,伴随着新的考核设备的使用。
对于工业机器人技术专业方向,国家相继推出四个职业技能等级证书,分别为《工业机器人操作与编程职业技能等级证书》《工业机器人应用编程职业技能等级证书》《工业机器人集成应用职业技能等级证书》《工业机器人装调职业技能等级证书》[4-5]。分析四个证书的考核标准,其共同点是必须配套相应的工业机器人工作站设备进行考核。因此,对于高职院校而言,这将增加设备的投入。尤其在工业机器人技术专业上面,若要培养学生同时获得上述四个证书,则必须采购四种类型的教学设备,对高职院校的办学经费是一种挑战。但是,分析四种X职业技能等级证书的考核要求,发现其共同点都是围绕工业机器人的应用与编程为核心。对于职业院校课程而言,可以先开设工业机器人虚拟仿真课程作为考证的前期预备课程,让学生在课堂上感受X证书考试过程。因此,工业机器人虚拟仿真技术的应用有利于1+X证书制度与工业机器人技术专业教学的结合。本文以工业机器人应用编程技能等级证书考核要求为例,借助ABB工业机器人仿真技术的使用,完整仿真考核设备的搭建与程序编写。
1 工业机器人职业技能等级证书考核要求
工业机器人应用编程职业技能等级分为初级、中级、高级三个等级,三个等级依次递进,高级别涵盖低级别职业技能要求。对应工业机器人的操作方面,从最初的工业机器人安装与调试,到工业机器人现场编程应用,最后到工业机器人系统联调过程。但对于高职类院校,主要对应X证书的中级要求,即工业机器人的编程应用过程。借助虛拟仿真技术可以在计算机上进行工业机器人编程仿真应用。
2 工业机器人工作站搭建
基于ABB工业机器人提供的RobotStudio仿真软件进行模拟[6-7],在其虚拟环境中对各个设备、模拟通信、仿真输出进行合理配置,以降低实际搭建所需的成本。通过SolidWorks建模软件进行建模,以导入的方式进行工作站的搭建。通过实时仿真模拟装配过程中的轨迹以及工作过程中不合理的动作,对可能发生的碰撞进行优化和控制。
2.1 装配流程
在RobotStudio软件中有机器人模型库,只需导入IRB120型机器人及其系统。通过SolidWorks软件进行建模,在RobotStudio中导入其他所需的模型。本次工作站模型包括工作站平台、立体库、工件码盘、变位机、快换手抓以及机器人本体,如图1所示。
图2展示了六种不同的工件,Ⅰ号工件最初放置在工作站立体库上,Ⅱ~Ⅵ号工件放置于工作码盘中。零件的装配顺序为:
第一步,Ⅰ号工件由工业机器人抓取放置在变位机上,通过变位机上气缸进行定位;
第二步,将工作码盘中Ⅲ号工件与Ⅳ号工件先后搬运至Ⅱ号工件中;
第三步,将装配好的Ⅱ号工件整体搬运至变位机上的Ⅰ号工件中;
第四步,将工作码盘中Ⅴ号工件搬运至Ⅰ号工件中,此时,Ⅱ~Ⅴ号工件均在Ⅰ号工件中;
第五步,变位机旋转20°,利于Ⅵ号工件装配;
第六步,将工作码盘中Ⅵ号工件抓取放置于Ⅰ号工件中并旋转90°,以保证整个零件处于拧紧状态;
第七步,将变位机中装好的零件整体搬运至立体库中,等待下一步工序。
整个七步为零件装配的过程。
2.2 快换夹爪
在工作站搭建过程中需要先对工业机器人快换手抓进行设计。快换手抓主要由基座部分、夹爪部分、吸盘部分组成。要想设置成工具并安装至机器人,需要先在Robot-Studio中选择创建机械装置,然后在“链接”中添加手抓的三个主要部分,并将“L1”设置为BaseLink;在“接点”中创建两个关节J1与J2,用于夹爪的夹取动作,方向选择与夹爪移动的方向水平;关键点在于“工具数据”建立,也就是工具坐标,需要分别在夹爪和吸盘的末端建立一个坐标系,目的在于对工业机器人进行示教时可以按照机械工具的坐标系进行移动,如此可以更加方便地调整工具姿态,而且在使用插补命令时机器人的运算轨迹会更加精确,如图3所示。
3 I/O信号及Smart组件的配置
3.1 I/O信号的配置
在RobotStudio中需要配置的I/O包括虚拟示教器以及各个Smart组件。工作站需要配置的I/O包括快换手爪中夹爪的张开信号与闭合信号、吸盘的吸取信号、变位机原点信号、夹紧信号、旋转信号和水平信号,以及一些动画的信号,如表1所示。
3.2 快换手抓Smart配置
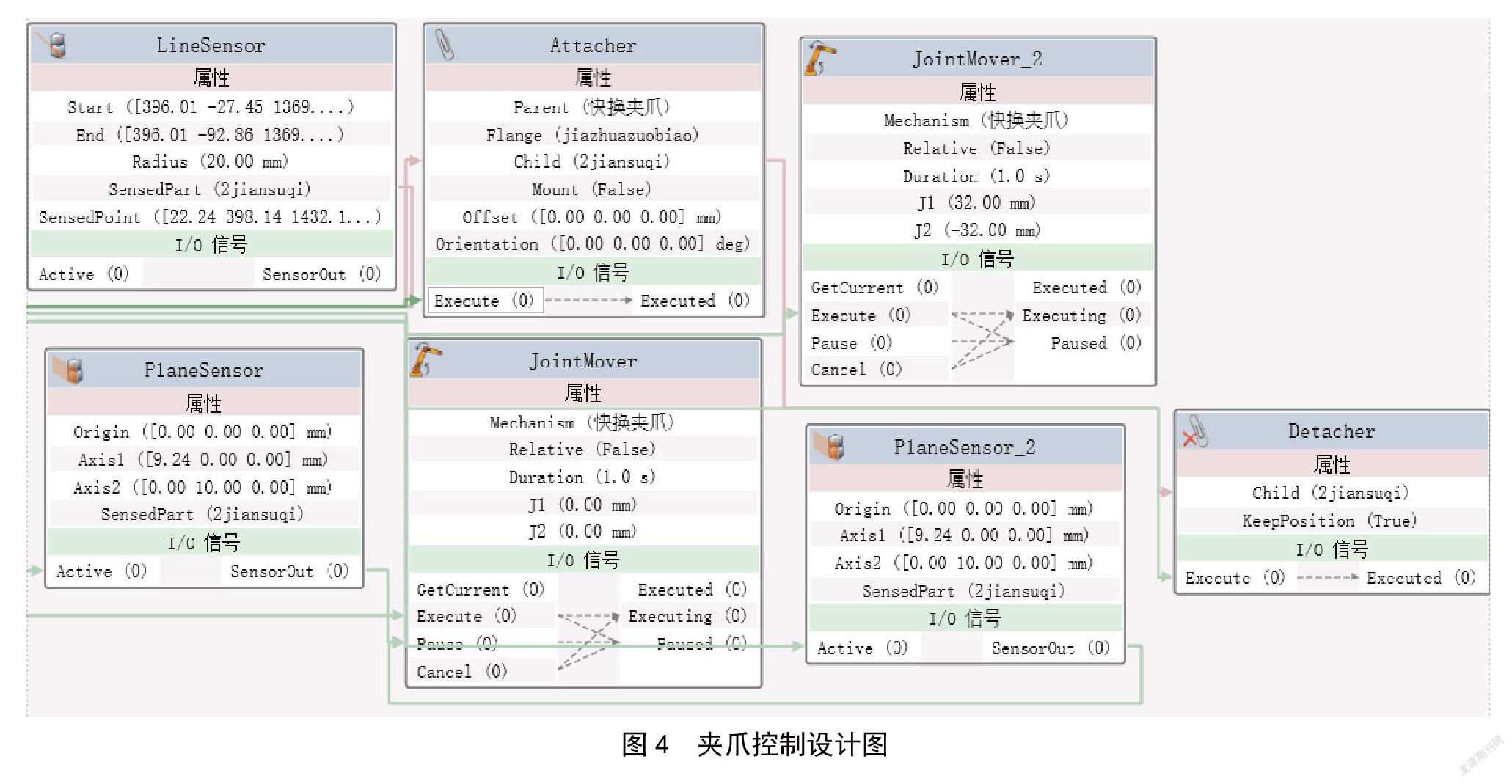
快换手抓需要实现的功能:能够通过工作站进行控制,并且可以抓取或拆除工件。夹爪控制需要利用的组件包括:一个LineSensor”,用于检测工件靠近,通过感应可以确定工件是否在抓取范围;两个“PlaneSensor”,用于抓取动作,一旦抓手接触到工件表面就会暂停抓取动画,可以避免穿模的情况出现;“Attacher”与“Detacher”,可以拆装工件,通过拆装同机器人同步动作;“JointMover”,用于夹取动作的动画模拟。吸盘只需用到“LineSensor”“Attacher”和“Detacher”。图4为夹抓Smart设计图。
3.3 变位机Smart的配置
变位机需要实现的功能:通过夹紧固定住工件,然后旋转改变工件角度,这样便于工件的装配。同快换手抓相同,变位机也需要“PlaneSensor”“JointMover”“Attacher”“Detacher”,还需一个“LogicGate[OR]”并延时0.1 s,使变位机能正常拆除工件。图5为变位机Smart设计图。
4 系统编程与仿真
4.1 系统离线编程
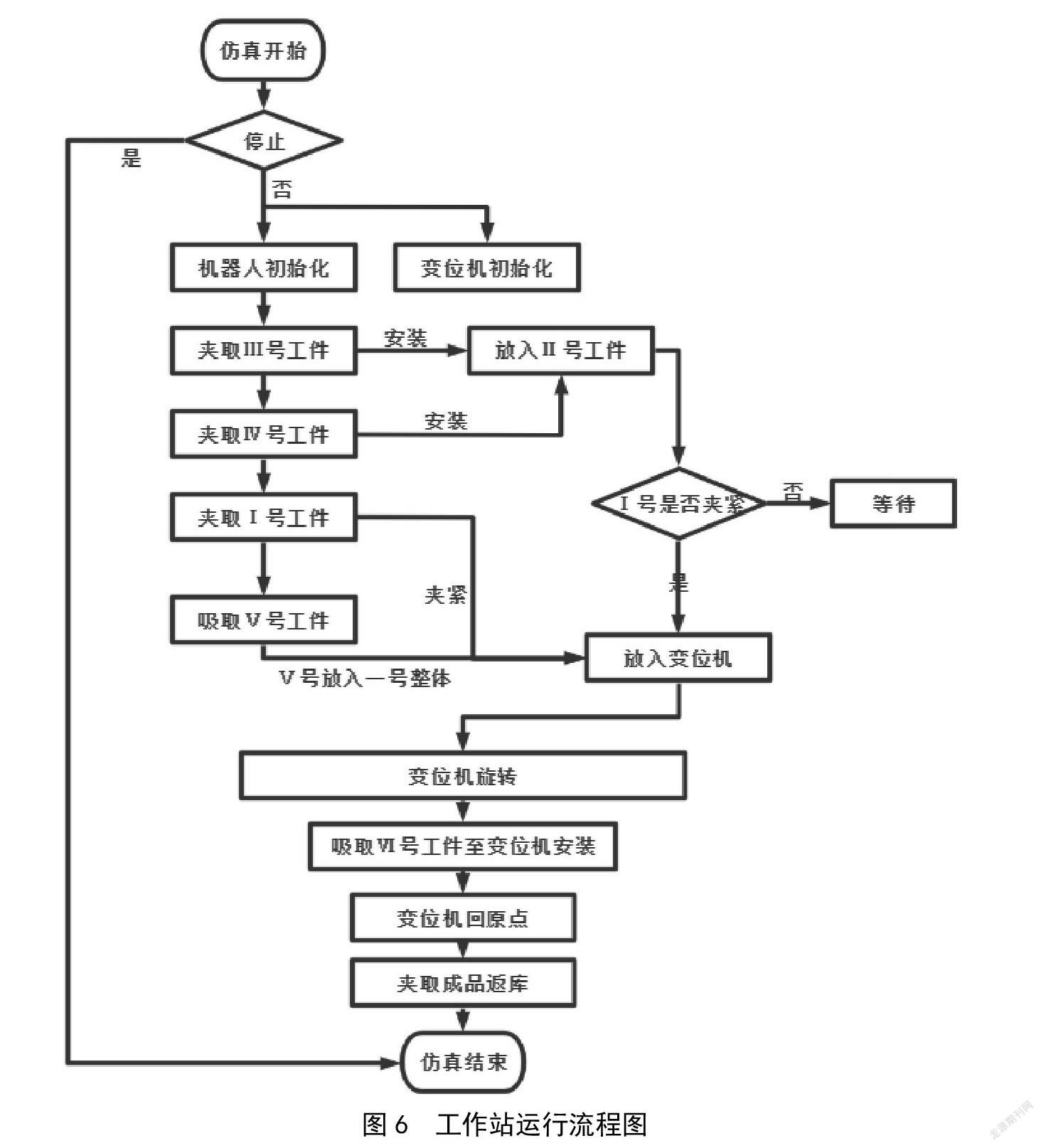
搭建好工作站模型后,利用RobotStudio软件中建立的I/O信号、Smart组件和通过机器人示教的点位,使用RAPID或虚拟示教器进行离线编程。工业机器人的程序一般主要都是由一个主模块和多个子模块组成,方便用户调用修改;还可以根据工作站的各种需要,设置单次运行或连续运行。在本次设计中,工业机器人的主要任务是将工件从库中取出进行组装,当运行至最后一个工件时,变位机开始旋转,使工件更容易安装。工作如图6所示,搬运并组装六个工件,最后返库为一整个流程。
4.2 仿真过程
点击“仿真”中的播放按键执行仿真程序。在本次的仿真中,为了使过程看起来更加趋于真实情况,添加使用了“LinearMover”组件,它的作用是模拟工件物理掉落的效果。同时,为了实现工件与工件之间的联动,需要使用“Arracher”组件并建立它们之间的属性连接,在需要将它们变为一组整体时,可以由虚拟示教器通过I/O发出信号,这样就能避免在搬运时出现搬运单个工件的情况。
5 结束语
通过工业机器人虚拟仿真技术的应用,能够搭建工业机器人工作站,通过虚拟配置I/O信号端口和Smart组件的设定,基本上可以仿真工业机器人工作站的工作情况。对于1+X证书制度下,工业机器人技术专业对应的四个X职业技能等级证书在工业机器人操作考核方面都可以采用虚拟仿真技术。采用虚拟仿真技术可以大大降低教学设备采购成本,教师在教学方面更加直观与方便,学生更容易理解并掌握工业机器人的操作与编程。虚拟仿真技术的应用有利于1+X证书制度在工业机器人技术专业中的推广与应用。■
参考文献
[1]高彩霞.百万扩招背景下1+X证书制度实施的关键点、难点及着力点[J].教育与职业,2020(13):11-18.
[2]吴南中,夏海鹰,胡彦.1+X证书制度下教学变革的诉求、特征与路径[J].中国职业技术教育,2020(18):5-11,18.
[3]丁翠娟.职业教育教材对1+X证书标准的转化及其实现路径[J].中国职业技术教育,2020(18):19-25.
[4]吴南中,夏海鹰.1+X证书制度下职业院校變革逻辑与推进策略[J].教育与职业,2020(8):5-12.
[5]杜怡萍.1+X证书制度实施的要件、挑战及策略[J].教育学术月刊,2020(4):35-41.
[6]孙增光,王士军,孟令军,等.基于RobotStudio焊接机器人工作站仿真设计[J].机床与液压,2020(5):29-33.
[7]孙立新,高菲菲,王传龙,等.基于RobotStudio的机器人分拣工作站仿真设计[J].机床与液压,2019(21):29-33.
