无人机遥感测绘技术在工程测量中的应用
2021-01-08刘红沪
刘红沪
(中国水利水电第八工程局有限公司,湖南 长沙 410000)
随着高新技术的发展,计算机、通信技术不断更新,我国无人机产业取得了巨大的成绩,尤其是在遥感测绘方面,借助无人机平台的应用为各个行业提供了更快、更优的测绘服务保障。无人机遥感技术是一种新型应用测绘技术,在机动性、灵活性方面优势较为显著,测绘效率高、经济性好,可胜任快速实时对地调查监测任务。文章着重围绕此技术展开详细分析。
1 无人机遥感测绘技术研究背景
无人机全称为无人驾驶航空器,目前无人机遥感(Unmanned Aerial Vehicle Remote Sensing,UAVRS)在各行业中广泛推广,将无人机与遥感技术结合运用,可获取大量资源、环境信息,快速获得分辨率相对较高的遥感影像,并制作满足规范精度要求的地理信息产品,具有自动化、智能化特点。
近些年,无人机遥感与卫星遥感、有人驾驶飞机遥感并称为“三大遥感平台”,其在飞行高度、速度、条件以及影像分辨率精度方面各有差异。具体适用情况如下:
(1)卫星遥感:适用于全球、全国大区域测绘;
(2)有人驾驶飞机遥感:适用于国内较大区域航测;
(3)无人机遥感:适用于市、县等小范围区域航测。
2 无人机遥感系统组成与测绘技术要点
2.1 无人机遥感系统组成
近年来,国内无人机遥感领域研究热度居高不下,打造了不少知名品牌,包括亿航、中科遥感、昊翔、华科尔、大疆等,结合《中华人民共和国测绘行业标准》(CH/T 1013—2005)要求,无人机遥感系统组成包括七大组成部分。
(1)飞行平台:指无人机机体本身,用于搭设导航器、传感器等,常见类型包括固定翼、多旋翼无人机以及无人直升机、无人飞艇。无人机(航空摄影测量)基本参数要求如表1所示。具体应用时需根据测绘项目需求选用,一般情况下满足表1中的各项参数要求即可。
(2)飞行导航与控制系统:此系统运行目的是确保飞行平台运行姿态正常,其直接影响遥感数据采集质量。
(3)地面监控系统:无人机飞行期间主要由自动驾驶仪控制,地面监控无人机工作状态,具体功能如表2所示。
(4)任务设备:主要包括数码相机及其控制装置。其被安装于机身任务仓内,用于获取遥感影像。此类相机多数采用非量测相机,控制装置与飞控系统一体化设计,可实现定点、等时间或距离间隔曝光,实时记录曝光时影像经纬度、高度以及飞机姿态等信息。

表1 无人机(航空摄影测量)基本参数要求

表2 地面监控系统功能一览表
(5)数据传输系统:包括空中与地面两部分。传输距离一般超过10km。
(6)发射与回收系统:一般采用地面滑跑发射与回收方法,若是遭遇复杂场地条件时,可使用弹射发射、伞降回收方法。
(7)野外保障装备:包括野外运输装备、机械维护装备,是保证无人机遥感测绘工作顺利开展的基本保障。
无人机飞行作业流程图如图1所示。
2.2 无人机遥感测绘技术要点
(1)提出任务,申请空域。无人机遥感测绘作业任务提出后,需对测区基本情况、覆盖范围进行调查分析,明确测绘目标,合理制订测绘计划并安排外业工作时间。外业开始前,向空域管理部门申请空中作业飞行许可证,申请通过后方可进行飞行作业。
(2)航线设计。根据无人机遥感测绘作业任务要求,在无人机性能、作业时间、气象以及安全等约束条件下,为无人机设置最优飞行路线。无人机遥感测绘航线设计方法主要包括以下三种:①基于目标快速定位的航线设计。无人机飞行任务为目标快速定位时,由地面操作人员控制无人机爬升至任务高度后,进入程控状态。对此,在航线设计时,需从任务高度开始确定飞行航迹。②基于区域影像获取的航线设计。无人机飞行任务为区域影像获取时,需在确定飞行区域的基础上计算航带间距、飞行高度以及航带数目、长度等。③回收航线设计。无人机回收方法众多,国内伞降回收、阻拦回收方法运用较多,注意合理设置回收点,应急点应超过3个。

图1 无人机飞行作业流程图
(3)飞行作业。无人机遥感测绘中,飞行作业时间以上午10点至下午2点为宜,微风或无风且光照充足的情况下,获得的影像质量最佳,无人机航摄飞行作业要点如下:①明确测区位置、气象情况,判断无人机能否起飞。②组装无人机、调试地面系统,连接无人机与地面系统。③在地面系统设置相机参数、航线等。④在地面系统输入飞行指令,选择起飞方式,控制无人机进入预定航线;控制采集设备按预定方式采集图像,并传输至地面系统。⑤无人机飞行作业中若是出现异常,地面控制人员可根据实际情况调整航行路线,对重点区域及时补拍。⑥完成预定飞行任务后,沿预定航线返回出发点,保证安全着陆。⑦检查采集到的影像数据,包括数码相机曝光情况、无人机飞行姿态、旁向、航向重叠度等,若是检查结果不符合内业规范要求,需及时补飞。
(4)遥感影像处理。无人机遥感测绘的最终目的是获取任务目标各种地理信息,生成DLG、DEM、DSM、DOM等测绘产品。①数据预处理:此步骤主要是生成后期处理所需格式数据文件,具体流程如图2所示。②空三加密:数据预处理完成后进行空三加密,包括航带法、独立模型法、光束法。其中,光束法最为严密,计算所得成果精度高,但是计算量大;航带法解算快但是精确低,具体需根据测绘任务合理选用。③DEM、DOM制作:通过自动匹配生成DSM,滤波后生成DEM,经数字微分纠正、数字镶嵌后,可生成数字正射影像(DOM)。

图2 数据预处理流程
3 无人机遥感测绘技术在工程测量中的应用案例分析
3.1 测区概况
该项目为公路测绘,采用无人机遥感测绘方法辅助公路设计选线工作,成图比例尺为1∶1000。测区位于市区以北方向,主要分为两大部分,测区范围如表3所示。测区主要为农区,居民地少、地物简单,植被覆盖面积大。测区内部有一个变电站,轻微干扰无线电信号。飞行场地开阔,天气无明显变化,光照条件适中。

表3 测区范围
3.2 无人机遥感测绘设备
该项目采用无人机遥感测绘技术,选用IRSA-II型油动无人机+Nikon D800数码单反相机,无人机采用二冲程发动机,相关参数如表4、表5所示。
3.3 无人机遥感测绘作业
(1)航线敷设。该项目是道路测绘,测区为带状,因此顺应道路走向飞行即可,飞行起降场地条件良好,完成航摄后进行质量检查,若是不满足要求及时补飞,无人机摄影参数如表6所示。
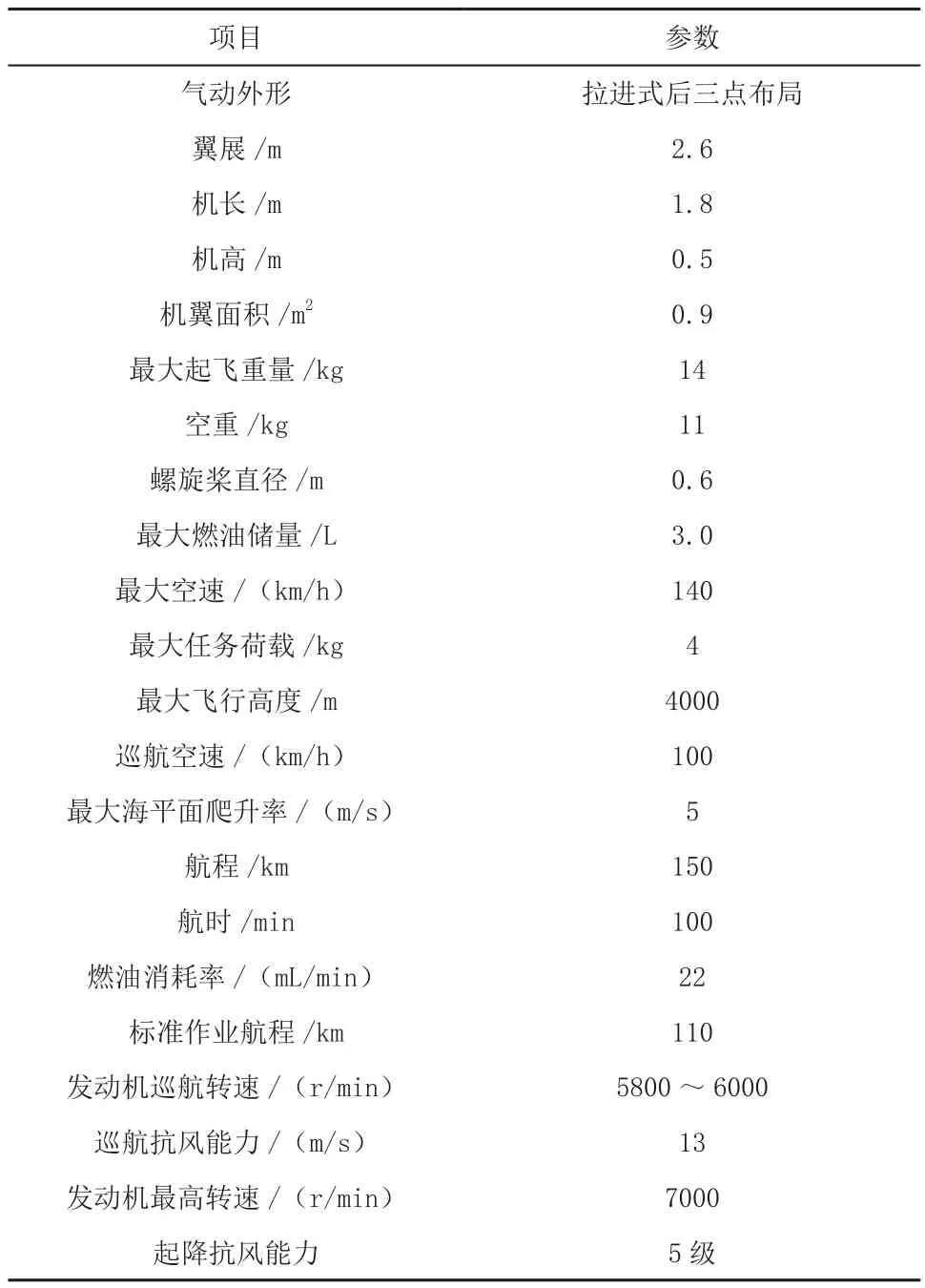
表4 无人机参数

表5 相机参数

表6 无人机摄影参数
(2)外业航摄测量。该项目无人机遥控起飞至200m高度后切换为地面站自驾模式,此次航飞共飞行4个架次,获取了满足内业标准要求的影像数据。此次航摄具体完成情况如表7所示。

表7 航摄完成情况
(3)外业像控测量。此次外业采用区域法布设像控点,沿着测区周边、内部以5~6条摄影基线均匀布设,共布设像控77个,人工铺设地标、GPS-RTK测量。
(4)外业质量检查。该项目外业检查显示影像清晰、色差色调适中;影像地面分辨率为0.10m(最大不超过0.12m),航向、旁向重叠度平均为73%、40%,满足内业要求;像控点满足1∶1000像控测量精度要求,可供内业使用。
3.4 内业数据信息处理
(1)设备配置。该项目内业数据信息处理主要采用以下设备:数据工作站1台;空三加密软件2套;数据编辑软件5套;高配置计算机5台。上述软件、计算机均来自武汉适普软件有限公司。
(2)内业处理流程。该项目内业处理流程如图3所示。采用地方独立坐标系、高斯-克吕格投影、地方独立高程基准,使用DPGrid自动空三软件解算,苍穹数据处理系统与ARCGIS10.0进行图像分幅。

图3 内业处理流程图
经内业检查显示,测区DOM、DEM数据质量满足规范要求,成图精度高、质量达标。
4 结束语
综上所述,近年来飞速发展的无人机遥感测绘技术凭借其机动灵活、高效快速、可适应复杂区域作业等优势,成为传统测量方式的有力补充,其操作相对容易,且运行成本低,具有极大的推广应用价值。实施无人机遥感测绘时,应规范落实前期规划设计、外业测绘以及内业影像处理等各项工作,切实获得精确可靠的测量成果,为相关作业实施提供科学的参考依据。
