基于行为预测的水下无人机一致性时延处理
2020-12-22牟春晓李广儒兰蔚
牟春晓,李广儒,兰蔚
(大连海事大学航海学院,辽宁 大连 116026)
水下无人机编队相较其他海洋观测手段,具有灵活性高、观测效果可靠、成本低的优点。其工作环境相比空中无人机有很大的差异。首先,水下无人机的工作阻力和所受干扰要远大于空中无人机;其次,水下无人机编队的通信会极大地受到海水的影响,从而发生信息传输的延迟、失真或丢失。因此,研究水下无人机编队的通信时延问题,对发展新时代的海洋战略有着重要的意义。
Kumar 等学者提出了一种针对一般六自由度非对称自主水下航行器的离散时滞控制(DTDC)定律。刘成林等根据不同的分析方法,介绍了关于具有通信时延的多个体系统一致性问题的结果,并对各种分析方法的特点进行了比较;孟宪松等针对多水下机器人编队控制中的水下无线通信问题,提出了一种基于调度的水下无线环状媒介访问控制协议;季蕾、樊春霞为研究发生信息传输时延情况下多无人机的编队控制器设计问题,使用服从Bernoulli 分布的随机变量描述时延,推导出与无人机编队控制时延相关的稳定性条件;李实吉等针对时延问题,提出了基于卷地毯式搜索的组网规划算法;刘明等针对同时具有网络诱导时延和数据包丢失的网络控制系统,提出了使得该系统达到指数稳定的动态输出反馈控制器的设计方法;何吕龙等针对无人机集群在有向通信拓扑和存在通信时延条件下的时变编队控制问题,设计了分布式编队控制协议。
本文在上述研究的基础上,使用二阶系统来描述水下无人机的动力学模型,通过对比有无时延条件下的无人机编队控制结果,分析时延在实际应用中的重要影响。给出了一种基于行为预测的一致性时延处理方法,应用此方法对水下无人机编队进行了仿真模拟,结果显示,此方法可以显著减小时延对编队带来的影响。
1 系统模型
1.1 单体无人机动力学模型
规定:无人机在编队控制中视为质点;综合观测需求与安全的考虑,无人机需要与观测点保持安全观测距离;仿真环境为静水。
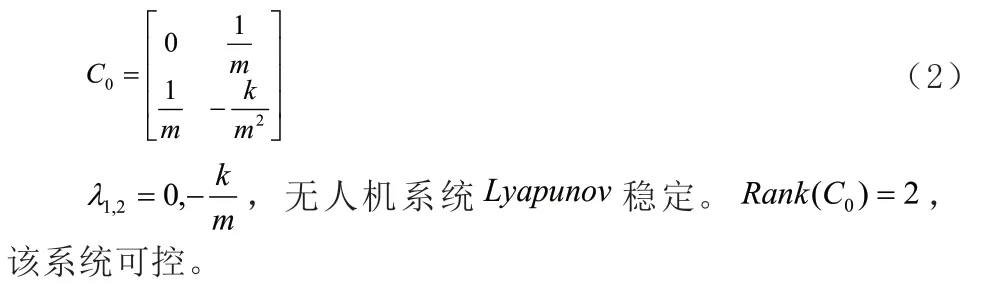
单体无人机在静水中的动力学模型如下:

其中,X1、X2∈R3为状态变量,k为阻力系数,m为质量,u∈R3为系统输入,Q为附加常量。
得到
假设人工势场函数的输入为δ,则输出ζ可以表示为:

其中,ζ,δ∈R3,η是吸引系数,µ是排斥系数。
1.2 无人机组动力学模型
设置编队成员间人工势场如下:
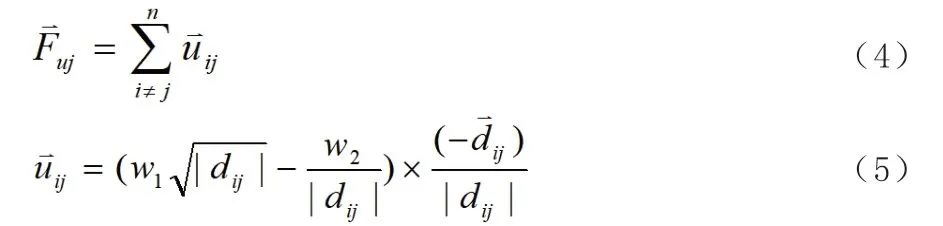
其中,n为无人机组的无人机个数,为无人机i与j之间的作用力,dij为无人机i与j之间的距离向量,w1,w2为待定系数。无人机组成员间的期望距离DI为:

个体数为n的无人机编队的动力学模型为:

2 时延问题
水下通信受传输介质的影响,信息传输时间延迟发生的概率要远远大于普通的以空气为传输介质的通信。一般来说,浅海(小于200 米)通信延迟有几百毫秒,深海(大于200 米)通信则可以达到几十微秒甚至几秒的量级。在这种量级的干扰下,编队的通信出错会直接影响编队的协同控制,轻则影响任务的完成质量,重则造成设备财产的损失。
首先,无人机对于自身数据的感知是实时的。对于上述控制系统,设置离散系统采样时间为ε,表示无人机i与无人机j之间的通信传输时延,且同一时刻无人机i接收无人机j信息的时延与无人机j接收无人机i信息的时延相同,即

对于离散时间系统,时间延迟应至少为一个采样周期。考虑到深海时延的期望数量级,不妨规定:χ∈(ε,2ε)在任意采样点t0时刻,无人机j向无人机i发送其采样时刻和自身数据,则无人机i会在时刻收到无人机j在t0时刻的数据。无人机i会立刻根据此数据进行自身姿态的调整,并在下一个采样点(t0+2ε)时刻发送自身姿态数据。其示意图如图1 所示。

图1 无人机间通信传输示意图
带时延的无人机组动力学模型为:

式(9)是一个强耦合的多个体非线性时滞系统。
3 行为预测方法
通过在发送端中添加信息发送时刻,与接收端本机时间对比来推知此条信息传输的时延。时延是否固定,在上述的讨论区间内对系统控制并无影响。本文为简明起见,以下所述时延皆为固定时延。
在t0+χij时刻,无人机i接收到无人机j的发送时刻和姿态信息。理论上来说,只要根据接收到的信息预测出t0+χij时刻无人机j的位置,就可以消除时延带来的影响。预测越精确,时延的影响就越小。
t0至t0+(χij−ε)时刻,无人机j对自身的姿态调整是根据目标点和其他无人机在t0−2ε时刻的位置信息所进行的,此信息则在t0−(χij−ε)时刻能被无人机i感知。则无人机j在t0+(χij−ε)时刻的位置信息可推。
t0+(χij−ε)至t0+χij时刻,无人机j对自身的姿态调整是根据目标点和其他无人机在t0−ε时刻的位置信息所进行的,此信息则在t0+(χij−ε)时刻能被无人机i感知。则无人机j在t0+χij时刻的位置信息可推。
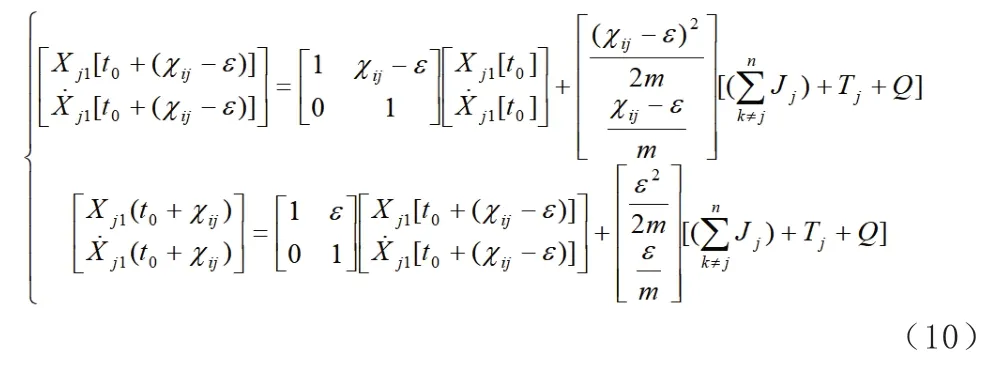
综上所述,根据t0+χij时刻无人机j的报文,预测时刻无人机j的位置信息为:
4 仿真分析(表1)

表1 参数赋值
目标点为(500,200,200),时延系统输出出现振荡,不再完全稳定,以平衡点为中心的邻域范围内做往复运动。无人机间距离出现较大波动,严重影响了观测网络的整体稳定性。根据式(10),设计时延处理器。输出结果如图2 所示。

图2 双无人机系统输出结果对比
定义无人机组目标合围的振荡系数ϕ,

有无时延预测的系统的振荡系数变化如图3 所示。
可见,有时延预测的系统有着更低的振荡系数,反映了系统更好的收敛性。无时延预测系统的二阶导数在约600s出现突增,有时延系统的二阶导数则几乎没有发生变化。经计算,有时延预测的稳态振荡系数的一阶导数比无时延预测平均下降了24.93%。
5 结语
本文分析了水下无人机系统在目标合围任务中的控制过程,围绕时间延迟建立了水下无人机系统的二阶离散时间模型。通过对比有无时延条件下控制系统的输出变化,说明了时间延迟会对无人机系统的稳定性造成极大的影响,如果考虑实际情况中的障碍物与海流,那么,时间延迟将是水下观测网络需要面临的巨大挑战。设计了时延处理器,将新的输出结果与不加时延处理器的结果进行比较,验证了基于行为预测的时延处理方法更佳。

图3 时延预测效果对比