电动汽车城市行驶工况构建方法研究
2020-12-15阙海霞宋若旸兰海潮王露马宗钰
阙海霞 宋若旸 兰海潮 王露 马宗钰
摘 要:为描述西安市电动汽车行驶状况,选取三种方法构建工况:聚类法、V-A矩阵法、马尔科夫法。对试验获得的数据先进行降噪平滑处理,然后采用短行程法划分运动学片段,最后根据不同方法合成了C-SHT工况、C-VA工况、C-PKMMC工况。通过计算三种工况与原始数据的误差,发现C-PKMMC工况的误差最小,为4.94%,而其他俩个分别为7%和9.35%。可以得到马尔科夫法构建的工况既满足行驶工况合成的要求,同时也提高了行驶工况的精度。
关键词:聚类法;V-A矩阵法;马尔科夫方法;短行程法;相对误差
中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2020)22-10-04
Abstract: In order to describe the driving situation of electric vehicles in Xi'an, three methods of constructing working conditions were selected: Clustering method, V-A matrix method, and Markov method. For the data obtained from the experiment, the noise reduction and smoothing process is first performed, and then the short-stroke method is used to divide it into kinematics fragments. Finally, the C-SHT working conditions, C-VA working conditions, and C-PKMMC working conditions are synthesized according to different methods. By calculating the error between the three working conditions and the original data, it is found that the error rate of the C-PKMMC working condition is the smallest, which is 4.94%, while the other two are 7% and 9.35%, respectively. The working conditions constructed by the Markov method meet the requirements of driving condition synthesis, and also improve the accuracy of driving conditions.
Keywords: Clustering method; V-A matrix method; Markov method; Short-Stroke method; Relative error
CLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2020)22-10-04
前言
汽车作为人们日常生活出行的主要工具,其能量消耗和排放是目前存在的最大问题。汽车行驶工况[1]它反映了某一区域汽车行驶过程的各项性能指标,其中包括了汽车的能耗和排放,可为汽车的动力性匹配、经济性分析、控制策略优化等提供理论依据。
吉林大学野晨晨等[2]由于实验室台架测量构建汽车行驶工况的方法存在诸多误差,从而提出车载测试法,即在实际车辆行驶过程中采集数据。该方法避免了实验室测量数据的误差同时保证了构建工况的合理性。姜平,石琴等[3]于2009年提出基于马尔科夫的行驶工况构建方法。将汽车行驶工况看作一个随时间变化的马尔科夫过程,提出了状态转移概率与相似性检验相结合的候选工况选择方法,建立了特征参数的评价准则,大大提高了行驶工况的精度。2012年石琴,仇多洋等[4]又提出了主成分分析法确定表征道路运行的特征參数,同时采用模糊C均值聚类法对运动学片段进行分类,进一步提高了构建工况的精度。本文将结合以上方法对行驶工况的构建进行研究,分析比较各方法精度。
1 试验规划与设计
以西安市为例,本文选择一款纯电动汽车为试验车辆;根据西安市不同类型道路的交通流量和占比以及里程数设计了试验路线[5]。试验采用平均车流法采集车辆行驶过程中的相关数据,试验时间设计为每天的早、中、晚三个时间段,连续进行一周的试验,共得到169999组数据。试验中数据的采样频率为1Hz。
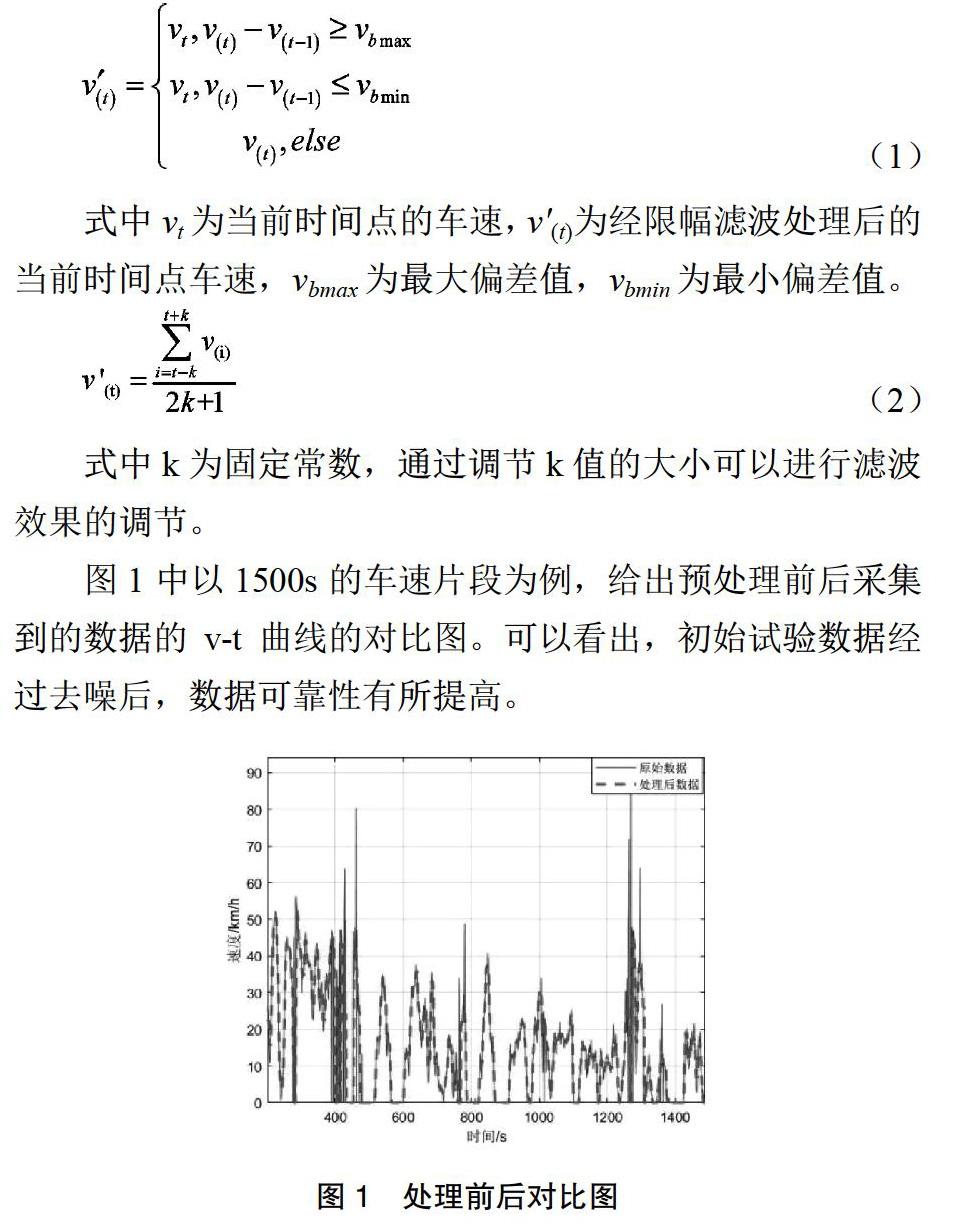
行驶过程中的操作失误和突发状况等会使得采集到的数据存在异常,这会影响构建工况的精度。因此需要对试验数据进行预处理。本文主要采用了脉冲噪声和高频噪声去噪[6]。对于脉冲噪声,本文选择限幅滤波法。限幅滤波法是根据所得信号变化来判断是否处于合理范围,这种方法对脉冲噪声的去除效果显著。对于高频噪声,本文选择递推。这种方法可以实时处理高频噪声,对于高频噪声有很好的抑制效果。下式(1)为限幅滤波函数,式(2)为平均滤波算法。
2 工况构建
2.1 工况构建方法分析
结合近年来常用的工况构建方法,主要选择[8]聚类分析法,V-A矩阵分析法,马尔科夫分析法这三种方法来构建工况。
2.2 聚类分析法
聚类分析法是根据划分好的运动学片段,结合主成分分析与聚类分析法,对片段进行分类,最后筛选出每一类中最具代表性的片段,将这些片段合成时长为1200s的工况。
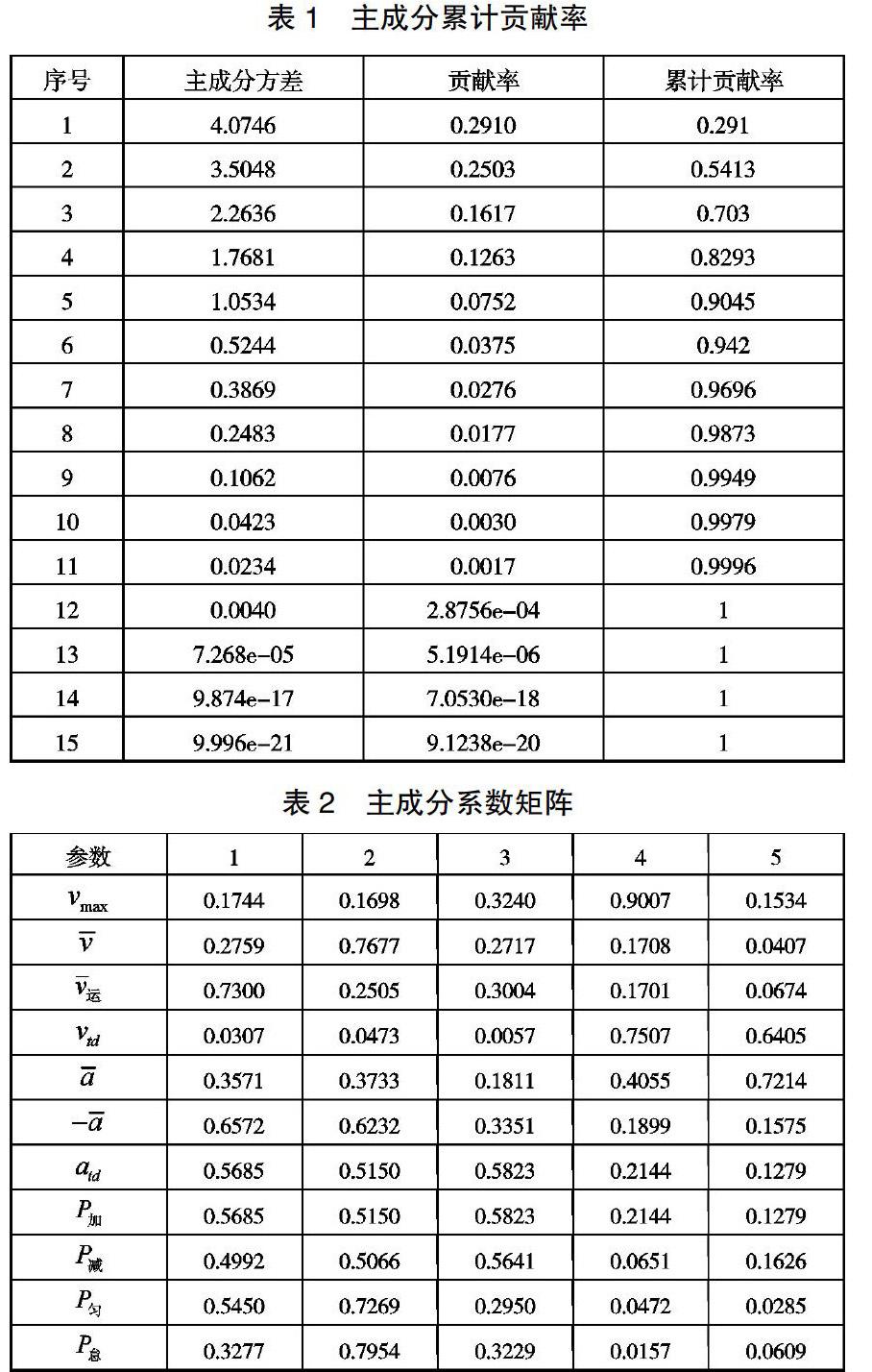
描述运动学状态的参数有很多,为了准确、全面的描述各运动学片段的特征,本文先选取了15个代表性特征参数进行利用主成分分析,得到各成分贡献率,结果如表1所示。在主成分分析过程中,累计贡献率越高,保留的原始数据信息就越多,为了不丢失主要信息,一般规定保留的主成分方差累计贡献率应超过85%。综合考虑,本文选取了前5个主成分分析。表2是所得的主成分系数矩阵,最终选取最大车速、平均车速、平均运行速度、速度标准差、平均加速度、平均减速度、加速度标准差、加速比例、减速比例、匀速比例、怠速比例这些能够反映运动学片段特征的参数。
K-means算法是一种通过均值对数据点进行聚类的算法[9]。该算法首先设定K个样本作为聚类中心,然后计算这些聚类中心与每个样本点的距离,根据最小距离就近划分样本。每个样本点距中心点的距离称为欧式距离,如下公式所示:
2.3 V-A矩阵分析法
V-A矩阵分析法是通过计算片段的V-A矩阵与原始数据的V-A矩阵的相似系数,从而选择相似系数高的合成最终工况。
本文根据数据试验所得,在试验过程中,电动汽车的车速一般不超过70km/h,所以本文设置速度上限为70km/h;同时综合实际道路情况和收集到的数据,设置加减速度区间为[-2.5,2]m/s2。取时间隔速度5km/h,加速度间隔0.5m/s2,计算处于相关速度与加速度范围内数据出现的概率,构成9×14的V-A矩阵,具体参考文献[11]。由于一些数据出现概率极低,概率小于10-3的数据认定为0。接着,计算每一片段V-A矩阵与原始数据V-A矩阵的相似系数Ω,如公式(5)。相似系数越高,片段与样本总体越相似,所构成的工况越贴合实际。因此,将候选片段按照Ω排序,选择Ω高的候选片段,其构成的工况曲线如下图3。
2.4 马尔科夫分析法
马尔科夫分析法相对于其他方法优点是利用马尔科夫方法进行处理,保留了车辆实际行驶过程中速度及加速度变换的随机性。本文划分片段后,采用主成分分析和聚类分析法对片段进行分类(如上文2.2所示),然后利用MATLAB软件编程根据最大似然估计法得到6类之间的马尔科夫状态转移概率矩阵P,如下:
(1)选择起始片段[12]。本文选择相关系数ρ最大的片段作为起始片段;
(2)选择中间片段。利用MATLAB软件随机生成处于0-1之间均匀分布的随机数,依据产生的随机数与生成的状态转移概率矩阵确定下一片段,以此方法不断选择,直至备选片段的累计时间达到理想长度;
(3)选择合适的备选工况。由于马尔科夫-蒙特卡洛方法构建的工况具有一定的隨机性,构建一次,不能完全代表最终工况,因此需要利用该方法进行多个备选工况的构建。最终将备选工况与原始数据进行对比,选择误差最小的备选工况为最终合成的工况C-PKMMC,如图4所示。
3 工况对比
构建工况的方法很多,本文选取了近年来最为典型的三种方法进行工况的合成,根据最终合成的工况,可以分析三种方法的特点。误差法是最常用的衡量构建工况优劣的方法,公式见式(7),表3为三种工况的特征值参数与总数据的特征参数的相对误差(%)。
由上表可知,三种方法构建的工况与总数据都存在一定的误差。C-SHT工况由于不同的聚类方法对于最终合成的工况与原始数据的误差也不同,本文选择的K-means聚类方法是根据中心点求均值的聚类,最终误差为7%。C-VA工况误差较大,为9.35%。但是该工况与总数据相似性高,如对构建工况有严格的长度限制时,尤其是长度较短的工况构建时,该方法较为适合。C-PKMMC工况的平均误差为4.94%,远小于其他两种方法。其中最高车速、平均车速和平均运行车速的误差相对较高。由图4可知,车速超过50km/h的片段只出现一次,大多数片段的最高车速在30-40km/h车速范围内,加速度与减速度在合理范围内,相对较为平稳。根据以上分析,C-PKMMC工况的相对于前两个工况,出现车速较高的现象,这与工况构建方法有关,但也在合理的范围内,比较符合实际。
本文描述的三种构建工况的方法,马尔科夫法相对优于其他两种方法,其既保持一定的随机性,又保证连接片段之
间的关联性,使得构建的工况更贴合实际道路情况,更适合电动汽车西安城市道路工况的构建。
4 结论
本文首先设计电动汽车行驶工况试验方案,进行数据采集以及数据预处理。将采集到的数据进行降噪平滑处理后,采用短行程法划分数据片段。接着,本文使用了三种构建工况方法:聚类分析法、V-A矩阵分析法和马尔科夫分析法,其中采用主成分分析确定了数据的特征参数。聚类法在此基础上通过K-means聚类分析对运动学片段进行划分,最后,根据偏差度合成C-SHT工况;V-A矩阵法则通过计算运动学片段与原始数据的V-A矩阵的相似性,从而选取相似性高的片段合成C-VA工况;马尔科夫法则在聚类法的基础上结合静态蒙特卡洛方法合成C-PKMMC工况,具有一定的随机性,但更符合实际道路情况。通过计算三种构建工况与原始数据的特征值相对误差,发现C-PKMMC工况的误差率最小,也最能代表西安城市工况,反映试验地区的交通特征,提高了行驶工况的精度。
参考文献
[1] 李耀华,刘鹏.西安市纯电动城市客车行驶工况研究[J].中国科技论文,2095-2783(2016)07-0745-06.
[2] 野晨晨,张洪坤,范鲁艳,等.沈阳市乘用车城市道路工况试验研究[J].科学技术与工程,2017,17(21):241-247.
[3] 姜平,石琴,陈无畏.基于马尔科夫的城市道路行驶工况构建方法[J].农业机械学报,2009,40(11):26-30.
[4] 石琴,仇多洋,吴靖.基于主成分分析和FCM聚类的行驶工况研究[J].环境科学研究,2012,25(1):70-76.
[5] 邵伟.蒙特卡洛方法及其在一些统计模型中的应用[D].济南:山东大学,2012.
[6] 张思远.乘用车城市行驶工况及能量管理策略研究[D].西安:长安大学,2018.
[7] 郑殿宇,吴晓刚,陈汉,等.哈尔滨城区乘用车行驶工况的构建[J].公路交通科技,2017,34(4):101-107.
[8] 李忠玉.西安城市工况构建及混合动力客车动力系统参数匹配研究[D].西安:长安大学,2018.
[9] 余曼,赵轩,魏朗,等.基于FCM聚类算法的电动车城市循环工况构建[J].公路交通科技,2018,35(10):140-149,158.
[10] 蔺宏良,余强,张雪莉.市区道路车辆行驶工况研究进展[J].机械科学与技术,2014,33(2):282-288.
[11] 张璇.西安市公交工况构建方法研究[M].长安大学,2017.
[12] 姜平.城市混合道路行驶工况的构建研究[M].合肥工业大学, 2011.
