无人机载激光雷达在山区地形图测绘中的应用
2020-12-14李卫良龙世林
李卫良 龙世林
摘 要:文章以江西省广丰区七星水库引水工程地形图测绘项目中获取的机载激光点云为例,介绍了机载激光雷达测量系统在植被深厚地区的数据分类处理及DEM产品制作,辅助地形图绘制使测绘成果满足规范标准[1]。通过这一案例,论证了机载激光雷达测量系统在植被深厚地区极大地减少了外业及内业数据整理工作量,缩短了作业工期,解决了人工RTK和传统航空摄影测量技术在植被深厚且茂密地区作业的技术难题,使山区地形图的高程精度得到了很大的提升。
关键词:机载激光雷达;地形图;应用
中图分类号:P237 文献标志码:A 文章编号:2095-2945(2020)36-0145-03
Abstract: Taking the airborne laser point cloud obtained from the topographic map surveying and mapping project of Qixing Reservoir Water Diversion Project in Guangfeng District of Jiangxi Province as an example, this paper introduces the data classification processing and DEM product making of airborne LIDAR measurement system in the areas with deep vegetation, and auxiliary topographic map drawing to make the surveying and mapping results meet the standard. Through this case, it is demonstrated that the airborne LIDAR measurement system can greatly reduce the workload of field and interior data processing, shorten the operation period, solve the technical problems of manual RTK and traditional aerial photogrammetry in the areas with deep and dense vegetation, and greatly improve the elevation accuracy of topographic map in mountainous areas.
Keywords: airborne LIDAR; topographic map; application
机载激光雷达系统(LIDAR)是一种集激光、全球定位系统和惯性导航系统三种技术于一身的空间测量系统[2]。该系统是将激光扫描仪、GPS接收机、惯性导航系统、数码相机及控制单元等搭载在飞机上, 通过主动向地面发射激光脉冲,接收地面反射回来的反射脉冲并同时记录所用时间,从而计算出激光扫描仪到地面的距离,结合POS 系统测得的位置和姿态信息可计算出地面点的三维坐标。
1 项目区介绍
本文主要介绍了江西省广丰区七星水库引水工程大比例尺地形图测绘,项目区位于江西省上饶市广丰区南部,属武夷山脉东段北麓,位于北纬28°16′~28°27′;东经118°27′~118°34′之间,线路总长度约13公里。境内地势南高北低,多为崇山峻岭,坡度陡峭,植被茂密,属于国家森林公园,多处为原始森林,多以竹林、杉树、台湾松、木荷、米槠等乔木为主。地形地貌复杂,传统的人工外业数据采集难度系数高,测绘精度难以保证。本项目采用大黄蜂BB-4无人机平台搭载华测AS-300HL多平台激光雷达测量系统执行外业点云数据采集工作。
2 外业数据采集
执行航摄任务前首先应按照规定向有关部门申请空域以取得航飞权,在保证满足项目要求的前提下, 同时应满足《IMU/GPS辅助航空摄影规范》的要求。
2.1 基站架设
数据采集之前在已知控制点架设GNSS基站,使用华测i80接收机。基站架设满足以下要求:
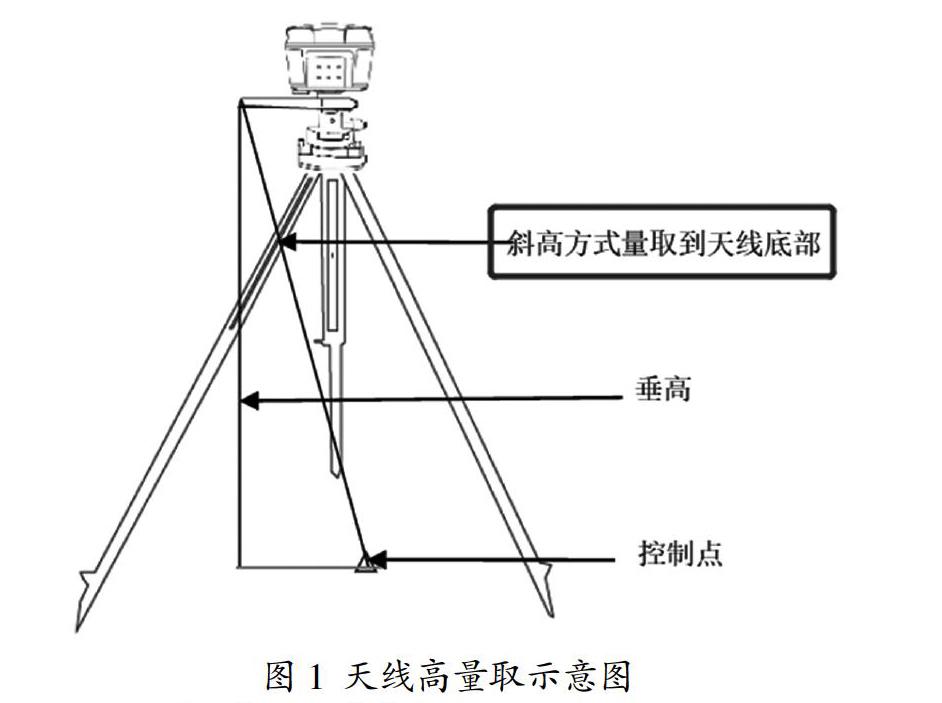
(1)基站架设于已知控制点后进行严格的对中和整平。(2)天线高测量采用量斜高方式,分别从脚架三个空档(互成120°)测量天线高量测基准面(测高板)至控制点中心标志面的距离,读数精确至1mm,互差应小于3mm,最后取平均值作为天线高,天线高量取方式如图1所示。(3)基站采样率设置为5Hz。(4)基站观测数据要求必须有GPS和BDS,并且两者卫星数之和不少于18个,要求保存HCN格式数据和Renix3.02數据各一份。
2.2 航线规划与航线探测
基站架设的同时,无人机技术人员对现场环境进行踏勘,并结合实际环境使用DJI GS Pro地面站自定义规划航线,航线规划完成后,首先使用大疆精灵 4 PRO无人机对规划航线进行探测。待航线探测完毕,方可进入正式无人机载雷达数据采集环节。
2.3 数据采集
待航线探测结束达到可飞行条件后,对机载雷达系统进行设备安装完毕后,开始数据采集。华测AS-300HL多平台激光雷达测量系统数据采集通过RC-8手持控制器控制,其通过无线通讯方式,可达到8km的传输距离,在无人机飞行过程中亦可实时监控系统各个传感器的工作状态。
数据采集分为以下步骤:(1)传感器参数设置:主要包含激光扫描仪和相机参数设置。(2)开始工程:开始工程即开始POS数据采集,待工程开始后,需要使设备及无人机保持静止状态并持续5分钟,目的是为了确保获得更多静态历元后期进行平差处理。(3)“8”字飞行与惯导初始化:“8”字飞行的目的是为了让惯导更快地进入稳定状态,待“8”字飞行结束后方可正式数据采集。(4)开始采集:在“8”字飞行快要结束前,点击“开始采集”,同步开启激光数据和影像数据采集。(5)停止采集:航线飞行完毕后,点击“结束采集”关闭激光和影像数据采集。(6)无人机降落与静止:结束采集后,无人机降落,继续静止5分钟。(7)停止工程:静止完毕后,停止工程,结束POS数据采集。(8)数据拷贝:整个工程结束后,在通电状态下连接相机数据拷贝线缆拷贝影像数据,断电后可连接数据传输线拷贝POS数据,通过数据存储卡拷贝原始激光数据。
3 数据处理
3.1 原始数据
激光雷达测量系统一次采集得到的原始数据主要包括以下几种:(1)GNSS基准站数据,为基站观测得到的GNSS数据。(2)POS采集数据,主要包括移动站GNSS数据与惯导数据。(3)激光数据,为激光扫描仪扫描数据。(4)影像数据,即相机拍摄的照片。
3.2 基站数据处理
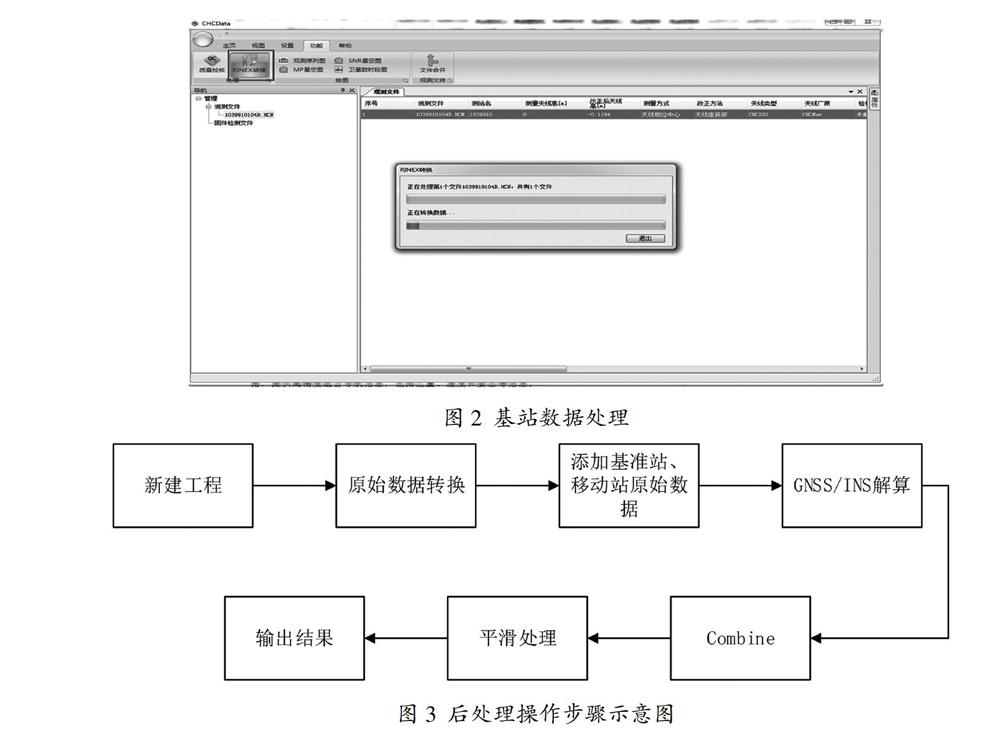
基站数据处理主要是将原始的HCN文件进行格式转换和天线设置,生成Renix3.02文件,使用CHCData软件完成,如图2所示。
3.3 POS解算
POS解算采用Inertial Explorer8.7后处理软件进行。该软件可用于处理所有可用的GNSS、INS 数据,提供高精度组合导航信息,包括位置、速度和姿态等信息,如图3所示。
3.4 生成点云
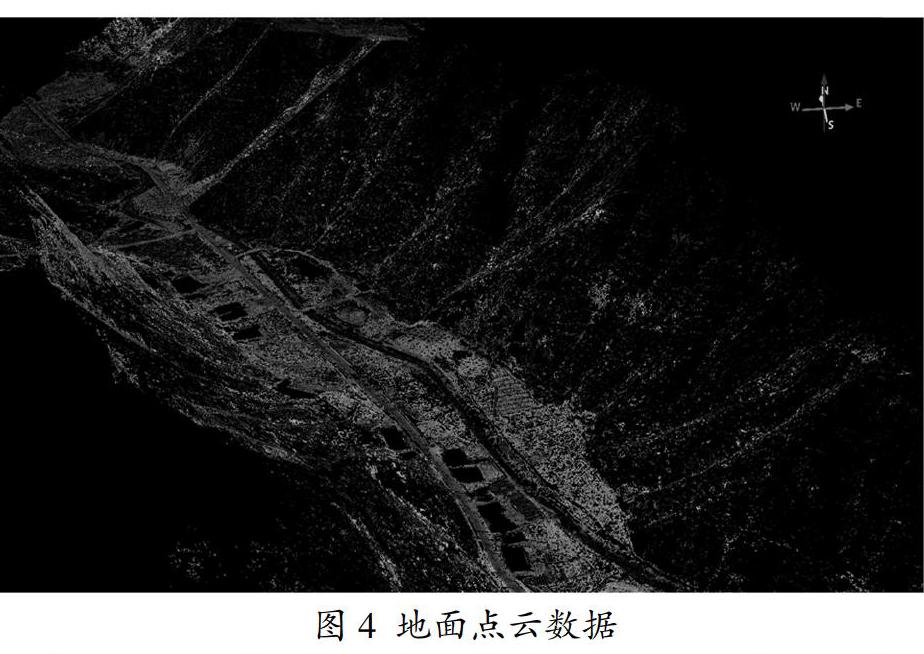
使用CoPre软件将原始激光数据与POS数据进行融合解算,转换生成CGCS2000坐标系下的las格式点云。将生成的点云数据进行分类处理[3],最后生成等高线、高程点成果,具体流程为:点云自动分类→根据实测点检查合格→人工编辑分类结果→地面点→构建数字高程模型→等高线、高程点成果,点云分类后地面点如图4所示。
3.5 点云数据成图
将分类出的地面点进行建模(DEM),人工对模型进行干预。对模型中不合理的三角网,将未分离出的地面点进行手動分至地面点,直到三角格网合理化。高程突变的区域,调整软件分类的参数或算法,重新进行小面积的自动分类。
在精分类后的地面点模型上,分离出等高线关键点,利用软件自动生成等高线,可设置最小面积、光滑以及等高距等参数,生成项目所需比例尺的等高线。按照所需要的高程点间隔导出点云数据三维坐标,即为高程点数据文件。
最后将生成的等高线及高程点数据文件导入Cass软件中进行编辑,即完成对山区地形图高程要素的采集编辑工作。
3.6 点云数据精度对比
本次点云精度检测采用项目区现场布设检查点的方式。检查点选取: 分别在平坦水泥路面、山地和丘陵等地形条件和裸地、稀疏植被、茂密植被下等处用全站仪或 RTK 测绘均匀布设一定数量检查点,检核DEM内插时的高程较差以及DOM的平面较差。共选取了49个检查点进行精度检查,东坐标最大误差为0.120m,北坐标最大误差为0.117m,高程最大误差为0.118m。平面中误差为0.099m,高程中误差为0.074m。经检核均满足规范标准,其中部分检查如表1所示。
4 结束语
通过机载雷达在项目中的应用,可以得出机载雷达测量系统在植被深厚及地形复杂地区可以发挥巨大作用,相对于传统测量极大地提高了测量精度,缩短作业工期,减少了大量的外业工作量。机载雷达测量系统能够全天候作业,不仅白天作业,夜间也能正常作业,生产效率更高,且无需野外采集像控点,只需采集少量野外检测点。随着机载雷达测量系统技术的不断成熟,可以在基础数据采集与管理、交通、林业、农业等领域得到广泛应用[4]。
参考文献:
[1]陈小雁,闻丽佳.机载激光雷达点云在高植被山区数据处理中的应用研究[J].工程建设与设计,2019(18):242-243.
[2]徐阳亮.基于LIDAR技术的点云数据获取及精度分析——以洞庭湖摄区为例[J].资源信息与工程,2018,33(05):122-123+126.
[3]李伟.机载激光雷达辅助地形图绘制的应用实践[J].测绘通报,2019(S2):130-133.
[4]庞治国.基于无人机载激光雷达的库区高精度DEM生成[J].电子测量技术,2018,41(09):80-83.