光源共享3+1S型光纤陀螺在轨故障诊断与延寿设计
2020-12-14张金保
张金保,林 松,潘 雄,李 勇,孙 丽
(1.北京控制工程研究所,北京 100190; 2.北京航空航天大学,北京 100083)
近年来,小卫星发展迅速,被广泛应用于通信、遥感、技术验证等领域[1-2]。鉴于小卫星的体积、功耗和重量限制,为其配套的星载设备也必须具备体积小、功耗低、重量轻的特点,对于一些需要长期应用的领域,还要求卫星具有较长的寿命。另外,空间应用的电子产品,由于其不可维修的特性,一旦出现故障只能使用备份的冗余措施进行处理[3-4],一般要求惯性姿态敏感器内部的部组件不能出现单点,尤其对于产品中比较重要的关键部件,即不能由于一个零部件出现故障,而导致整机功能的失效。
目前国内外延长卫星上惯性产品寿命、提高可靠性最通用的方法是,增加陀螺通道的数量,使用多通道进行冷备份,当某些通道性能下降或者失效时,启用冷备份产品增加卫星惯性模块的寿命[5-6]。但是,由于小卫星的资源有限,无法通过上述常规方法延长惯性测量系统的寿命。
对于空间应用的光纤陀螺来说,为了实现小型化、低功耗的目的,一般会采取一些复用、集成的技术手段,在这种情况下,为了保证整机无单点的高可靠性,必须对这些复用模块进行必要的冗余和备份。在如此多的限制条件下,长寿命的小卫星技术是一个很重要的研究方向。
1 双光源四轴一体设计
由于光纤陀螺的SLD 光源的特征指标:功率、波长、谱型及偏振态等特性均对温度变化较为敏感[7-8],所以光纤陀螺都会包含对光源的温控电路设计。对于工作范围在-25 ℃~60 ℃的单轴光纤陀螺,按照其全温功耗分布,极限温度下线性温控电路的功耗能够占到单通道光纤陀螺功耗的50%,显然按照低功耗的设计理念,多轴共享光源是第一选择。光源模块是影响干涉型光纤陀螺寿命和可靠性的最关键、最脆弱的器件[9]。为了防止出现光源的单点,需要对光源进行备份设计,同样考虑低功耗的要求,光源的备份首选冷备份方案。另外,为了减小整机的体积和重量,一体化方案设计比分体化更能节省空间。
根据上述设计理念,提出了一种双光源四轴一体化光纤陀螺。
1.1 光路设计
本方案设计的光路方案如图1所示:
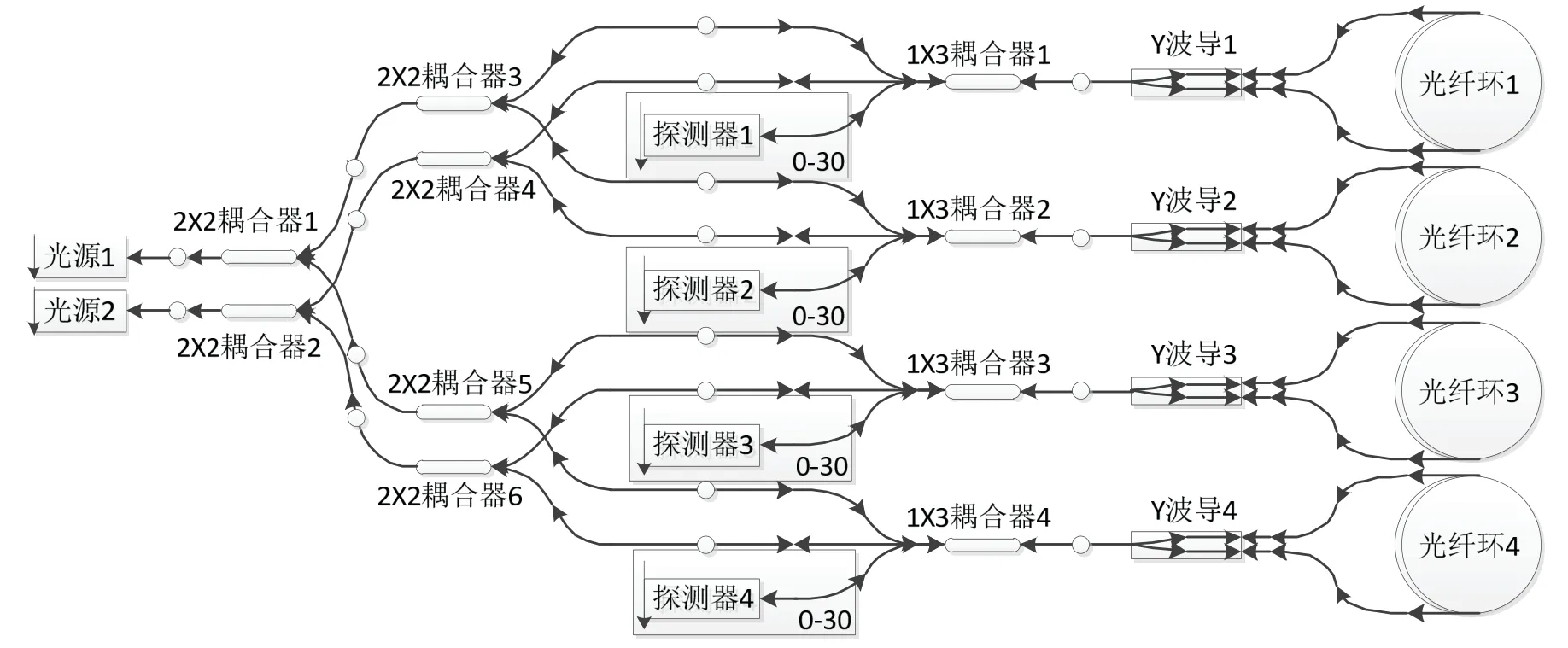
图1 3+1S 光纤陀螺光路设计示意图Fig.1 Optical path design of 3+1S fog
双光源设计方案中,每一个光源通过两级3 个2×2耦合器,将光源发出的光分成4 路,分别为4 个光纤环敏感轴提供光信号。光源1 通过耦合器1、3、5 分出的4 路光信号为后面的4 个轴提供光信号,光源2通过耦合器2、4、6 为后面的4 个轴提供光信号,无论哪一个光源、耦合器出现故障都不会导致整机全部功能失效。
同时,4 个敏感角速率的光纤环组成3+1S 结构,其中光纤环1、2、3 为相互垂直结构,光纤环4 分别与前3 个轴成54.73 °,光纤环4 组成的敏感轴作为前三个相互垂直轴的备份轴。任何一个由1×3 耦合器、Y 波导、光纤环、探测器组成的光路出现故障,另外三个轴依然能够完成载体空间角速率的测量。综上,双光源互为冷备份,4 个敏感轴形成的3 备1 的方案,实现了整个光路的无单点设计。
1.2 电路设计
为防止电路上的单点,两路光源的驱动电路和四路闭环检测电路的设计均采用相互独立的方案。任何一路出现故障均不影响整机的测试功能。
1.3 光功率监测电路设计
闭环检测电路如图2所示,主要包含数字闭环电路、光功率检测电路和通讯模块。
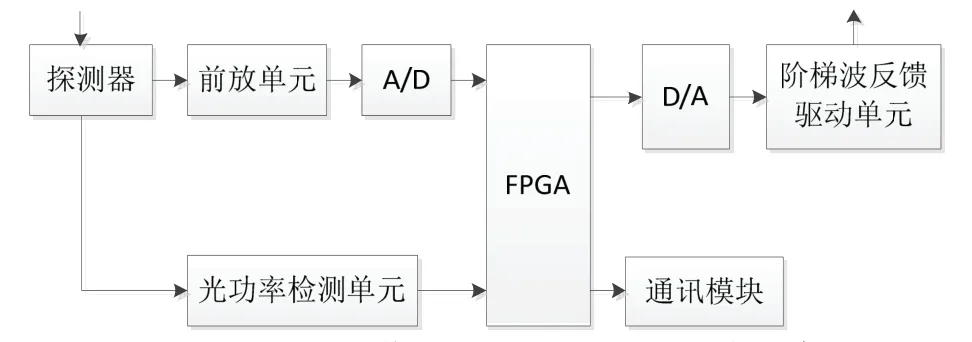
图2 FOG 信号检测电路功能模块示意图Fig.2 Functional module diagram of FOG signal detection circuit
鉴于小型化的理念,设计了简化的光功率监测电路,如图3所示。
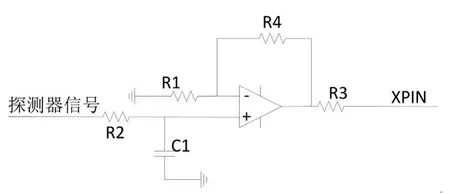
图3 光功率检测电路示意图Fig.3 Schematic diagram of optical power detection circuit
探测器信号进入检测板后,分为两路:一路通过隔值电容,取其交流信号进入数字闭环回路;另一路通过同相放大器,其直流信号作为光功率检测的依据。通过一个双路比较器,实现了简化的光功率限值的检测。电路示意图如图4所示。
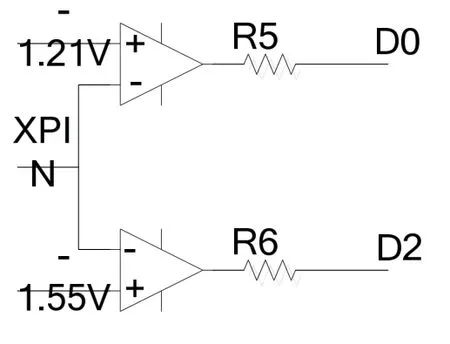
图4 光功率门槛监测电路示意图Fig.4 Schematic diagram of optical power threshold monitoring circuit
光功率监检测部分,设计了两个光功率的限值,第一限值D0 为光功率设计值的50%,第二限值D2为光功率的15%,“0”表示未触及门限,“1”表示到达门限。用户可以根据系统的精度指标余量,设定切换光源的具体方案。
2 陀螺在轨状态分析
在轨运行的光纤陀螺,地面可以遥测到的数据为4 个通道的速率遥测和状态字遥测。通过4 个轴的速率遥测可以完成陀螺的自检功能,通过状态字可以监视光纤陀螺各部分的运行状态。具体如表1所示:
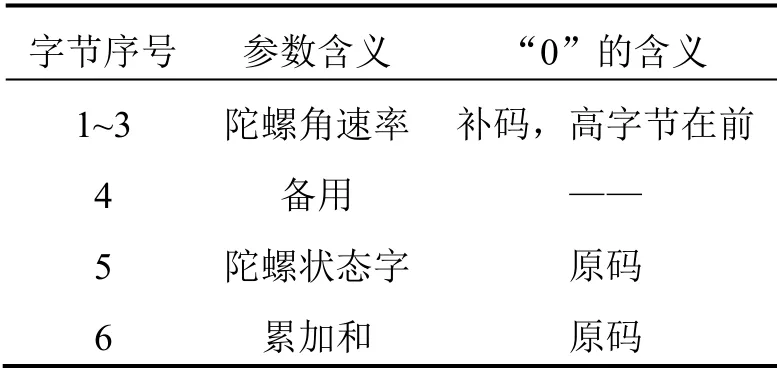
表1 光纤陀螺角速率信息Tab.1 Angular rate information of fog
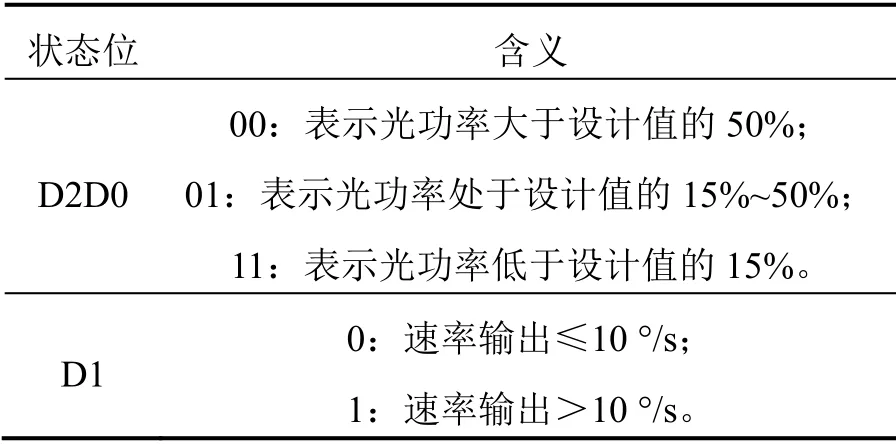
表2 光纤陀螺状态字含义Tab.2 Meaning of fog status word
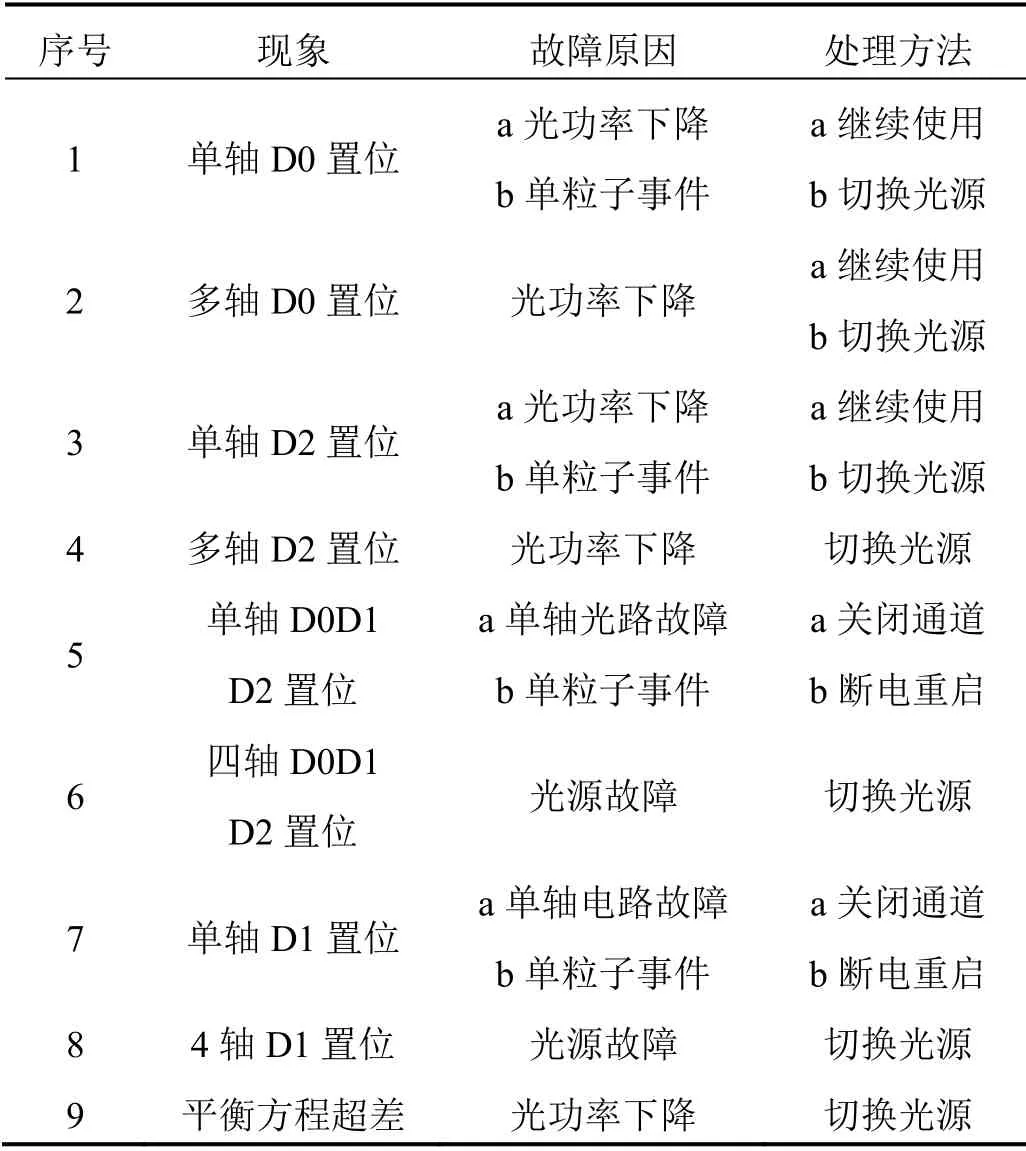
表3 在轨FOG 工作状态枚举列表Tab.3 Enumeration list of on orbit fog working state
3 陀螺自检方法
对于有一个斜轴备份的陀螺方案,可以通过自身的角速率输出信息,完成对测试回路本身的自检,方法是对四轴输出做平衡方程,具体算法如下:
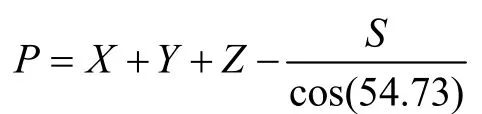
其中P为平衡方程值,X、Y、Z表示3 个相互垂直轴的角速率输出信息,S表示斜轴的角速率输出信息,单位均为(°/s)。理想情况下P应该为0,但是,由于光纤陀螺输出夹杂了白噪声信号,对于小型化光纤陀螺来说P的值在0.003 °/s 附近。当光源出现故障时,陀螺无法输出正确的角速度,则平衡方程超差;当某个轴出现故障导致无法输出正确的角速率时,平衡方程超差。理论上讲,只要平衡方程的输出正常,陀螺的角速率测量值就是可信的,就可以作为卫星姿态调整、变轨的依据。
4 陀螺在轨故障检测
导致光纤陀螺失效故障的原因一般分为光学器件性能退化或失效与电路失效两种。根据本方案的设计特点,光学器件的失效分为两部分:一是光源或2×2耦合器的失效;二是1×3 耦合器、Y 波导、光纤环、探测器失效。
4.1 光源故障
当光源或者光源驱动电路发生故障时,光功率会出现突然下降到0 的状态,直接的影响是4 路光功率监测的状态位D0、D2 同时置位为“1”,间接的影响是光纤陀螺数字闭环无法工作,陀螺输出的角速率出现饱和现象,即状态位D1 出现置位现象。此时需要切换光源。
4.2 单轴故障
单轴故障包括单轴光路故障和单轴电路故障。
单轴光路部分包括1×3 耦合器、Y 波导、光纤环、探测器,这部分故障会导致单轴出现D0、D1、D2 同时置位的现象。此时只能关闭该通道。特殊情况是,如果是1×3 耦合器的输入端一根光纤出现故障(断裂),则切换光源后该通道仍然能工作,判断方法是,出现单轴D0、D1、D2 同时置位的现象时,可以尝试切换光源,如果故障消失,则可以判断为另外一路光源回路上的2×2 耦合器和1×3 耦合器之间的光纤断裂,电路可以在完好的光源下正常工作,只是损失单轴的光源备份。
单轴电路包括:光纤陀螺数字闭环回路模块、通讯模块、光功率监测模块。如果是数字闭环回路部分出现故障,现象是单通道速率输出异常,此时会出现D1 置位的现象,则只能关闭该通道。如果是光功率监测电路出现故障则会出现D0、D2 置位,而D1 正常,并且陀螺输出正常、整机平衡方程正常,则可以继续使用。
4.3 单粒子事件
由于FPGA 内部有寄存器存在,如果出现单粒子打翻的事件会对电路造成一定影响,FPGA 内部的寄存器分为两种,一种是存储固定值的,比如闭环分频系数、通信频率分频系数等,该部分一旦被打翻,则数字闭环的频率将出现混乱,陀螺的输出出现异常,状态位D1 置位或者出现通讯失败的情况,平衡方程则一定会出现超差现象,此时需要对该通道的检测电路进行断电重启操作;另一种为周期刷新的寄存器,若该部分出现打翻,下一周期进行刷新时,异常位就会恢复正常,电路输出最多就是出现零星野值,D1也可能出现零星野值,此时,星载计算机会按照预设的剔野规则将其剔除,不会影响整体的正常使用。
4.4 光功率下降
光纤陀螺用SLD 光源的特点,是其输出光功率的效率为一个衰减浴盆的曲线,但是由于SLD 光源的制作工艺限制,用户在使用SLD 光源的时刻,并不能确定该光源处于功率输出衰减曲线上的位置,所以对于光源的衰减曲线无法进行有效的预判。根据光纤陀螺在轨和地面的运行情况,光纤陀螺运行一段时间后,检测电路收到的光转化为电的信号会出现不同程度的衰减现象,比如以三年时间为限,由探测器转换来的电信号衰减程度为10%~50%之间,并且光纤陀螺的随机漂移的实测指标也相应地下降[10]。
根据光路信号的正常衰减规律,光功率触碰到光功率的第一门限时,状态字D0 会出现一段时间在“0”和“1”的反复跳动,这是比较电路受空间温度和电路噪声引起的正常现象。根据实测当光功率下降到调试值的50%左右时,随机漂移的实测值为原来的1.6 倍左右,即光纤陀螺的精度降低为设计值的62.5%。
对于不同的应用需求,当光功率下降到第一门限时,可以采取不同的处理方法,如果此时陀螺的输出精度能够满足卫星的指标要求,则可以继续使用当前光源,如果精度的下降超出了卫星设计余量,则需要切换光源保证光纤陀螺的输出精度。
5 寿命延长方案及实验
当两个光源的光功率均下降达到第一门限时,此时单开哪一个光源,陀螺输出精度都不能达到光纤陀螺的出厂指标,在卫星功耗允许的情况下,可以将两个光源的驱动电路同时打开,则此时两个光源到达探测器的光功率处于叠加状态,并且陀螺的精度会随着光功率的提高而升高。
本方案中光纤环的长度为290 m,为了保证最终标度因数的一致性,双光源在装配前需要对波长参数进行匹配,选择波长接近的两个光源进行搭配。注2:随机漂移的计算方法为0.25 s 采样,然后进行10 s 平滑。
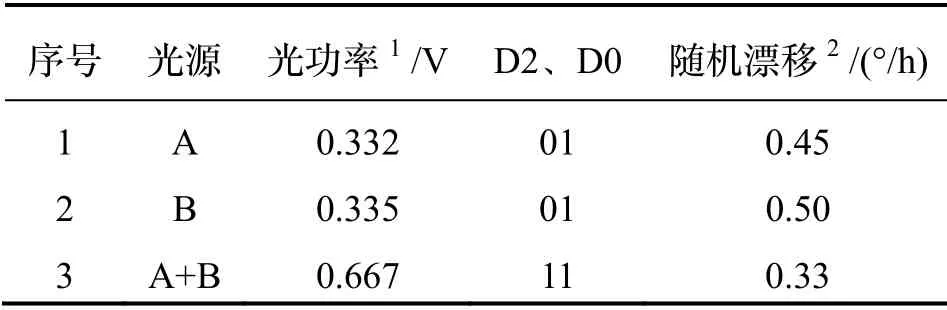
表4 双光源同时工作时对陀螺精度提升的实际测试结果Tab.4 test results of gyro precision when two light sources work at the same time
表4为本文开展的双电源同时工作时对陀螺精度提升的实际测试结果。本案例中光纤陀螺的设计精度为0.3 °/h(1σ),表4中,第1、2 条中,A、B 光源的光功率数据,是陀螺在工作一定年限后所衰减到的光功率,处于刚刚到达第一门限的位置,该光功率为设计值的一半左右,此时光纤陀螺的输出精度下降到初始设计精度的62.5%。此时如果两个光源同时工作,则到达探测器上的光功率基本上能恢复到设计值,根据实测陀螺输出精度也恢复到设计值。
根据光纤陀螺用SLD 光源的光功率衰减曲线,光源越到寿命后期,光功率的衰减越缓慢,通过此方法可以将光纤陀螺的寿命大大延长,保守估计可达3~5年。
6 结 论
根据空间小卫星的应用需求,提出了一种双光源四轴一体小型化3+1S 光纤陀螺方案,该方案不存在任何单点,任何器件出现一重故障都不会导致整机功能的失效。方案对电路在轨可能出现的故障模式进行了详尽分析,给出了出现故障或器件性能下降后的处理措施。本文最后利用双光源的技术特点,提出一种在轨延长工作寿命的方案,可以使光纤陀螺在双光源光功率下降后,通过双光源共同工作的方式,使陀螺的性能恢复到初始设计状态,将陀螺的在轨寿命延长3~5年左右,为后续长寿命卫星的研制提供了一种解决方案。
