基于双轴旋转惯导的舰船航向误差动态评估方法
2020-12-14史文森郭正东
王 超,史文森,郭正东,蔡 鹏,姜 暖
(海军潜艇学院,青岛 266000)
船载惯导航向信息是作战舰船武器发射所需要的基准信息,惯导航向精度直接影响导弹、雷达等武器系统的使用。此外,船载惯导航向精度对远洋航天测量船测控精度也产生较大影响[1-3],为了满足舰船对长航时、高精度惯性导航系统的需求,国内外研究机构主要采用旋转调制技术降低惯导系统误差因素的影响。旋转式惯导系统已成为国外舰船高精度标准导航设备[4-7]。在海上动态条件下,受到海况、舰船运动等因素的影响,舰船姿态不断变化,对长时间连续工作的惯导系统,受到各种误差因素的影响,其姿态精度不断降低,如何对舰船惯导航向误差进行动态评估成为迫切解决的问题[8-10]。目前,针对惯导航向误差评估主要通过实验室或坞内等进行静态条件下进行,或通过天文导航、差分GPS 姿态测量等方式[10],实现对惯导航向误差进行动态评估,而对于长时间海上航行的舰船而言,当受到气候或其它因素干扰等影响,难以获得外界准确航向参考信息时,则无法对舰船航向误差进行实时动态评估。
针对无外界参考航向信息情况下的舰船航向误差实时动态评估问题,本文基于船载双轴旋转惯导,通过对比分析引起双轴旋转惯导航向误差和纬度误差的传播规律,建立双轴旋转惯导纬度误差和航向误差之间的关联性数学模型,在此基础上,根据实时获取的纬度误差对双轴旋转惯导航向误差进行估计与补偿,提出了一种基于双轴旋转惯导实现舰船航向误差动态评估方法,通过仿真实验设计和仿真结果分析,验证了双轴旋转惯导纬度误差和航向误差关联性分析的正确性,以及基于双轴旋转惯导实现对舰船航向误差进行实时动态估计的可行性。
1 双轴旋转惯导纬度误差传播规律分析
影响双轴旋转惯导系统导航误差的因素包括陀螺漂移、加速度计偏差、初始对准误差、惯性元件安装误差、标度因数误差和随机误差等。对于双轴旋转惯导系统,双轴旋转可以自动补偿与转轴垂直方向的加速度计零位偏差、陀螺常值漂移、安装误差,对称性标度因数误差等[7],但对系统初始姿态误差和随机误差没有调制效果。
根据旋转惯导系统误差方程[7],主要考虑初始姿态误差的影响,解算双轴旋转惯导纬度误差的表达式为:

式中,a1、a2、a3分别为式(1)中初始姿态角误差的系数,各误差系数表达式为:
式中,δφ为惯导纬度误差,φE0、φN0、φU0分别为惯导姿态角初始误差,φ为舰船纬度,ω ie为地球自转角频率,ω s为舒拉周期振荡角频率。根据式(1)和式(2),在初始姿态误差的作用下,主要引起纬度舒拉周期振荡误差和地球周期振荡误差。通过将惯导系统工作在水平阻尼状态[8-9],可消除双轴旋转惯导纬度误差中受傅科周期调制的舒拉周期振荡误差分量,在水平阻尼工作状态,式(1)中的系数表达式为:

利用式(4)对式(3)进一步化简,得:

根据式(5),各误差源对应系数均呈现地球周期振荡,即在初始姿态误差等误差源的作用下,将引起双轴旋转惯导纬度误差呈现地球周期振荡特点。
2 双轴旋转惯导航向误差传播规律分析
根据旋转惯导系统误差方程,主要考虑初始姿态误差的影响,解算出双轴旋转惯导航向误差的表达式为:

其中b1、b2、b3分别为式(6)中初始姿态角误差的系数。由于在初始姿态误差的作用下,引起的惯导航向误差主要包括地球周期振荡误差分量和受傅科周期振荡调制的舒拉周期振荡误差分量,而在水平阻尼工作状态,受傅科周期振荡调制的舒拉周期振荡误差分量受到抑制,惯导航向误差主要呈现地球周期振荡特点,则在水平阻尼工作状态下,式(6)中的系数表达式为:
利用式(4)对式(7)进一步化简,得:
根据式(8),各误差源对应系数均呈现地球周期振荡,即在初始姿态误差的作用下,将引起惯导航向误差呈现地球周期振荡特点。
3 双轴旋转惯导航向误差动态评估与补偿
对比式(5)和式(8),则由初始姿态误差引起的纬度误差和航向误差系数表达式为:

根据式(9)可知,在水平阻尼状态下,初始姿态误差均引起双轴旋转惯导纬度误差和航向误差地球周期振荡,并通过对比不同误差源引起的相应纬度误差和航向误差系数地球周期振荡幅值和相位可知,航向误差地球周期振荡幅值为纬度误差地球周期振荡幅值的secφ倍,航向误差地球周期振荡相位比纬度误差地球周期振荡相位提前。因此,在初始姿态误差作用下,水平阻尼状态下双轴旋转惯导纬度误差和航向误差关联性模型如式(10)所示。
式(10)中,Aδφ为双轴旋转惯导纬度误差中地球周期振荡误差分量的幅值,Aφz为双轴旋转惯导航向误差中地球周期振荡误差分量的幅值,θδφ为双轴旋转惯导纬度误差中地球周期振荡误差分量的相位,θφz为双轴旋转惯导航向误差中地球周期振荡误差分量的相位。
值得注意的是,以上推导双轴旋转惯导纬度误差和航向误差关联性模型时,主要考虑初始姿态角误差的影响,而其它误差源受到旋转调制作用,对双轴旋转惯导纬度误差和航向误差的影响相对初始姿态角误差影响相对较小,对利用双轴旋转惯导纬度误差和航向误差关联性模型,根据纬度误差,实现双轴旋转惯导航向误差估计与补偿影响较小,可忽略不计,后面将通过仿真实验方法进行分析说明。通过以上分析,在水平阻尼工作状态,双轴旋转惯导纬度误差和航向误差存在如下关联性:(1)航向误差地球周期振荡幅值为纬度误差地球周期振荡幅值的secφ倍;(2)航向误差地球周期振荡相位比纬度误差地球周期振荡相位提前。
在水平阻尼条件下,双轴旋转惯导纬度误差和航向误差均呈现地球周期振荡特点,振荡周期为24 小时,对于长时间海上航行的舰船而言,当难以获得高精度的外参考航向信息时,若在t 时刻获得舰船双轴旋转惯导的纬度误差,利用式(10),则可获得(t+6 小时)时刻的航向误差估计值,利用估计出的航向误差对双轴旋转惯导输出的航向信息进行补偿,则可提升双轴旋转惯导航向信息精度,实现舰船航向误差实时动态评估。
4 仿真实验验证
4.1 仿真实验设计
为验证利用双轴旋转惯导纬度误差与航向误差之间的关联性模型,实现根据双轴旋转惯导纬度误差对惯导航向误差进行实时动态估计与补偿方法的可行性,在仿真实验设计中,一方面,结合当前文献中高精度激光惯导中惯性器件、以及安装误差、标度因数误差、初始误差等误差参数,设置仿真实验条件,验证在综合误差作用下基于纬度误差实现航向误差动态估计的可行性;另一方面仅考虑初始姿态误差的影响,并对比综合误差的影响,分析其它误差源对利用所建立的纬度误差与航向误差之间的关联性模型对双轴旋转惯导航向误差估计精度的影响。
根据双轴旋转激光惯导运动学方程,建立水平阻尼双轴旋转激光惯导仿真模型,将双轴旋转惯性导航解算输出的导航参数与参考基准进行比较,获取双轴旋转惯导纬度误差和航向误差数据,将仿真输出的航向误差作为惯导实际航向误差;根据仿真输出的纬度误差,利用双轴旋转惯导纬度误差与航向误差之间的关联性模型,实现惯导航向误差的实时动态估计,并利用航向误差的实时动态估计值对双轴旋转惯导实际航向误差进行实时补偿。
结合文献中激光惯导激光陀螺和加速度计的主要技术参数以及安装误差、标度因数误差、初始误差、双轴旋转方案等参数[7,11],设置仿真条件如下:三个激 光 陀 螺 的 常 值 漂 移 为[0.001 ° /h,0.001 ° /h,0.001 ° /h],随机漂移标准差均为0.0005 ° /h;三个加速度计的零偏均为0.01mg,随机白噪声标准差为0.005mg;陀螺和加速度计的对称性标度因数误差均为2ppm ;安装误差阵为[0,4′,-4 ′ ; -4 ′,0,4′ ; 4′,-4 ′,0]; 初 始 姿 态 误 差 为[0.8′,0.8′,2.0′] ;初始航向为90°,初始经度、纬度分别为122 ° E和36 ° N。双轴旋转惯导一直工作在水平阻尼状态,仿真时间为25 天。
4.1 仿真结果与分析
在水平阻尼状态,综合误差引起的双轴旋转惯导纬度误差和航向误差如图1所示,初始姿态误差引起的双轴旋转惯导纬度误差和航向误差如图2所示。
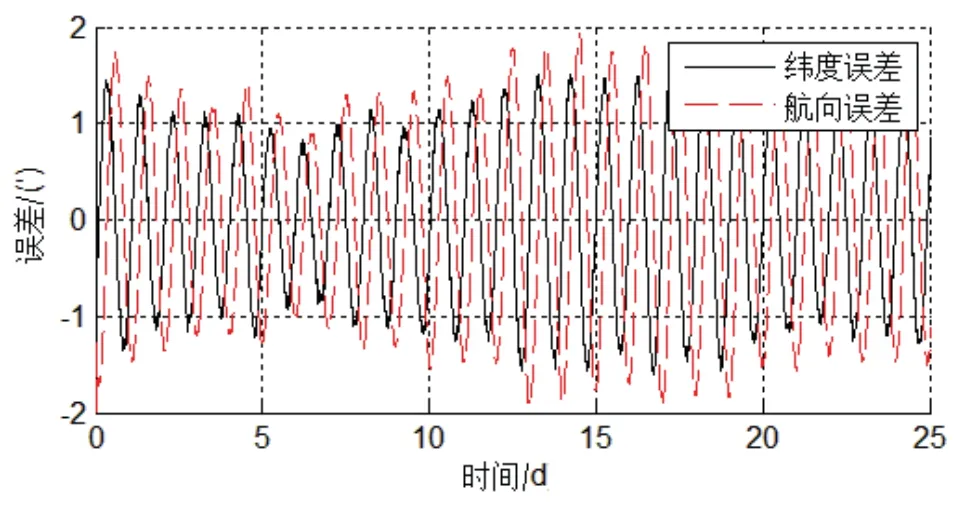
图1 综合误差引起的纬度误差与航向误差曲线Fig.1 The curve of latitude error and heading error caused by comprehensive error
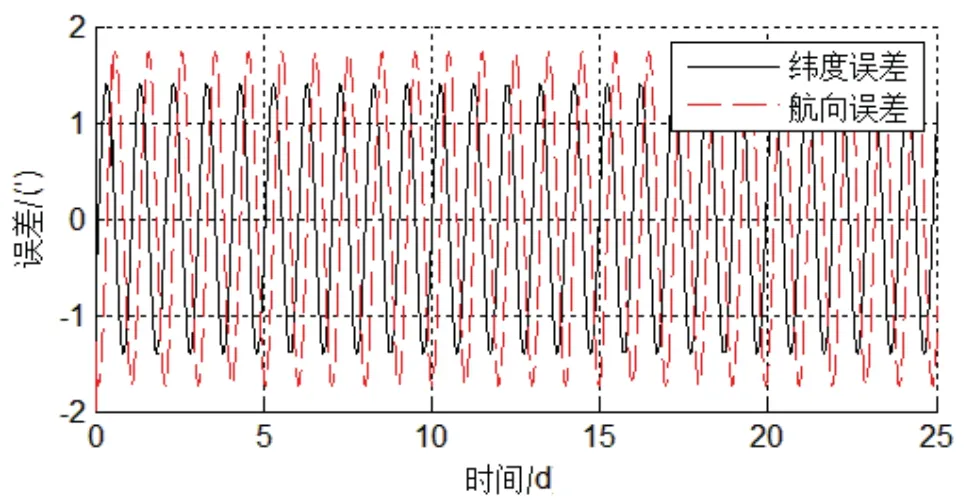
图2 初始姿态误差引起的纬度误差与航向误差曲线Fig.2 The curve of latitude error and heading error caused by initial attitude error
在图1和图2中,实线表示双轴旋转惯导纬度误差,虚线表示双轴旋转惯导航向误差。根据图1,在水平阻尼状态,综合误差引起的纬度误差和航向误差均主要呈现地球周期振荡性特点,同时,在不同时间段内,纬度误差和航向误差的变化范围不同,如在0至 10 天时间段内,纬度误差变化范围约为(-1 .3′,1.4′),航向误差变化范围约为(-1 .7′,1.7′),在10 天至20 天时间段内,纬度误差变化范围约为(-1 .6′,1.5′),航向误差变化范围约为(-1 .9′,1.9′),在20 天至25 天时间段内,纬度误差变化范围约为(-1 .3′,1.3′),航向误差变化范围约为(-1 .5′,1.5′),且在不同时间段内,纬度误差和航向误差的误差均值都近似为0。根据图2,仅考虑初始姿态误差的影响,双轴旋转惯导纬度误差和航向误差均呈现等振幅地球周期振荡性特点,纬度误差变化范围约为(-1 .4′,1.4′),航向误差变化范围约为(-1 .7′,1.7′)。
为反映利用纬度误差实现对航向误差动态估计的效果,可选择在双轴旋转惯导系统工作24 小时后,利用不同时刻对应的纬度误差可对航向误差进行实时动态估计,在综合误差作用下的动态估计结果如图3所示,在初始姿态误差作用下的动态估计结果如图4所示。在图3和图4中,点虚线为根据双轴旋转惯导纬度误差和航向误差之间的关联性,利用纬度误差估计的航向误差曲线,实线为惯导实际输出的航向误差曲线。
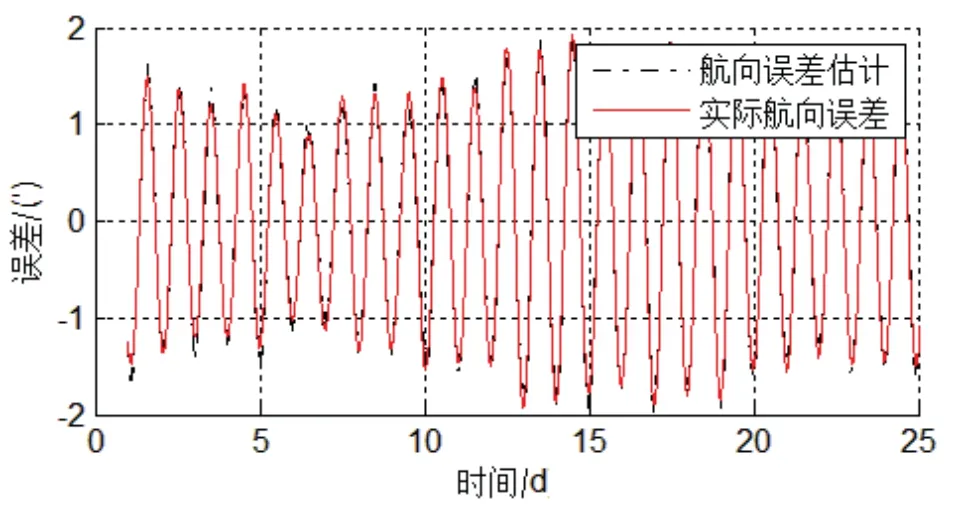
图3 综合误差作用下的双轴旋转惯导航向误差曲线Fig.3 The curve of heading error of TRSINS caused by comprehensive error
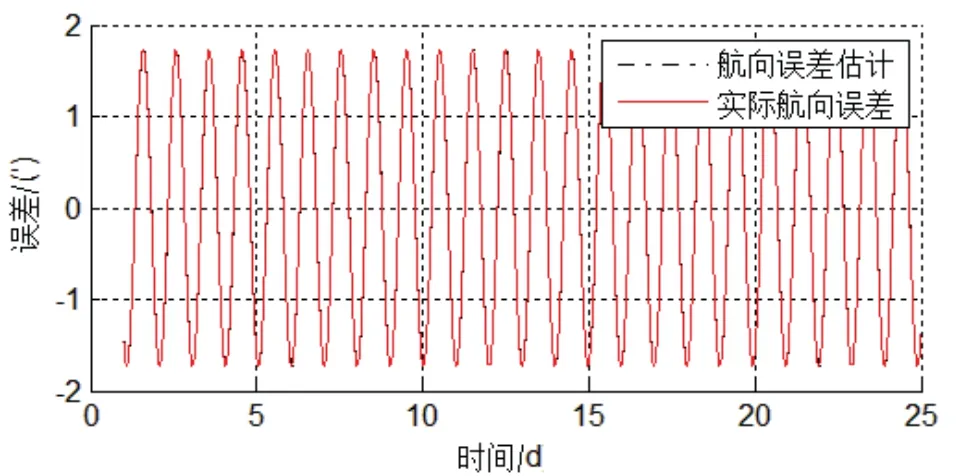
图4 初始姿态误差作用下的双轴旋转惯导航向误差曲线Fig.4 The curve of heading error of TRSINS caused by initial attitude error
根据图3和图4,无论在综合误差的作用下,还是仅考虑初始姿态误差的影响,利用双轴旋转惯导纬度误差估计出的航向误差曲线与实际航向误差曲线在振荡周期、振幅和相位等方面都基本保持一致,从而验证了双轴旋转惯导纬度误差和航向误差之间关联性分析的正确性,同时也验证了利用纬度误差对航向误差进行实时动态估计可行性。
利用双轴旋转惯导纬度误差对航向误差进行实时动态估计,并利用估计的航向误差对双轴旋转惯导实际航向误差进行补偿,如图(5)所示。
在图5中,点虚线为综合误差作用下,补偿后的双轴旋转惯导航向误差曲线,粗实线为仅考虑初始姿态误差作用下,补偿后的双轴旋转惯导航向误差曲线。根据图5,在综合误差作用下,当双轴旋转惯导工作24 小时后,只要获得实时纬度误差信息即可实现对时刻航向误差估计与补偿,对惯导航向误差补偿后,惯导航 向误差 振 荡范 围 为(-0 .28′,0.26′),标 准 差为0.0808′,误差均值为 -0 .0069′,与补偿前双轴旋转惯导实际航向误差相比,双轴旋转惯导航向误差振荡范围减小了85.8%,航向误差标准差减小1 个数量级以上;同理,也可分析在初始姿态误差作用下,利用建立的模型,通过纬度误差实现对航向误差进行动态评估与补偿,大幅提升了双轴旋转惯导航向精度,也进一步说明了,除初始姿态误差外,其它误差源由于受到旋转调制,对利用双轴旋转惯导纬度误差和航向误差关联性实现对惯导航向误差估计精度的影响较小,可忽略不计。

图5 补偿后航向误差曲线Fig.5 The curve of heading error compensated
因此,前面虽然仅考虑初始姿态误差影响而推导出的双轴旋转惯导纬度误差和航向误差关联性模型,可拓展适用于受到各种误差综合影响下的双轴旋转惯导航向误差动态估计与补偿。
5 结 论
在无外界参考航向信息情况下,为实现对海上动态条件下的舰船航向误差实时动态估计,提出了基于双轴旋转惯导的舰船航向误差动态评估方法。通过双轴旋转惯导航向误差和纬度误差的传播规律进行分析比较,建立了双轴旋转惯导纬度误差和航向误差之间的关联性模型,并基于该模型,在可获取外部参考位置信息的条件下,利用双轴旋转惯导纬度误差,实现对双轴旋转惯导航向误差进行实时动态评估与补偿,得到均方根误差约为0.0808′的航向误差精度,可实现对舰船航向误差进行实时动态评估,在工程应用上,可满足对高精度惯性导航系统航向精度的动态评估需求。
