一种空间机器人双臂捕获卫星减撞柔顺控制方法
2020-12-14曾晨东
曾晨东,陈 力
(福州大学 机械工程及自动化学院,福州350108)
目前空间站运行中的大部分维护与操作依赖于航天员的每次出舱任务,存在成本高、效率低、风险大等问题,故研究空间机器人替代宇航员完成在轨服务任务具有重大意义[1,2]。同时,随着空间技术的提高,双臂空间机器人在负载能力、运动稳定性及灵活性等方面的表现逐渐优于单臂空间机器人,空间机器人正逐步由单臂发展到双臂乃至多臂[3,4]。
值得注意的是,空间机器人执行在轨服务任务必然存在捕获操作过程。其中,捕获操作过程又具体分为路径规划、接近被捕获卫星、实施抓捕、镇定控制四个部分[5-6]。由于捕获操作过程空间机器人与被捕获卫星存在接触、碰撞,且完成捕获操作后空间机器人与被捕获目标组成的混合体系统处于受扰运动状态,对空间机器人在轨捕获操作的研究具有一定的挑战性。徐文福[7]等研究了双臂空间机器人捕获运动目标的自主路径规划问题。Lampariello[8]等设计了一种基于非线性优化的方法,以实现有限时间内对翻滚目标的捕获。Takahashi[9]等研究了被捕获目标与双臂空间机器人发生碰撞后对空间机器人的影响。
上述研究对捕获前路径规划和捕获后混合体的镇定控制取得了较好效果,但都未涉及到捕获过程冲击载荷对空间机器人关节的影响及镇定过程关节的保护。实际捕获处于高速旋转的卫星时,空间机器人关节将受到很大的冲击力矩。在捕获操作后的镇定过程,空间机器人关节在电机开启时也会受到冲击力矩,若冲击力矩超过机械臂关节所能承受的极限,关节将损坏。在地面机器人轴孔被动柔顺装配中,为避免机器人末端执行器与环境接触、碰撞时发生冲击破坏,常在机械臂的手腕处安装一种远中心柔顺装置(Remote center of compliance,RCC)。受此启发,本文提出将一种旋转型串联弹性执行器(Rotary series elastic actuator,RSEA)作为缓冲装置安装在空间机器人关节与机械臂之间,并设计与之配合的减撞柔顺控制策略来实现减撞柔顺控制。
然而,引入RSEA 缓冲装置后,空间机器人系统会有一定的关节柔性,进而产生弹性振动,影响系统稳定性[10]。为了同时实现空间机器人运动轨迹的渐近跟踪和抑制由关节柔性引起的系统柔性振动,本文运用奇异摄动理论将混合体系统分解为快、慢变子系统。针对快变子系统,采用速度差值反馈控制策略对弹性振动主动抑制[11]。针对慢变子系统,提出基于速度重构及不确定项估计的控制方案。考虑速度信号受噪声影响无法准确测量及空间机器人系统存在模型不确定、外部扰动等非线性不确定项[12-13],对空间机器人关节速度项进行重构,并对空间机器人系统不确定项进行估计及补偿。在保证空间机器人运动轨迹渐近跟踪的同时,使得控制方法更加地简单和精确。对上述控制方案进行数值仿真,结果验证了所提减撞柔顺控制策略的正确性。
1 缓冲装置及减撞策略
双臂空间机器人关节由电机通过RSEA 缓冲装置驱动,设计的RSEA 结构如图1所示。3 只扫臂呈120 °均匀分布,每个扫臂的负载空心轴与输入圆盘上的支持中轴连接。3 组弹簧安装在输入圆盘的挡块与扫臂之间,布置成内接等边三角形,每组含2 根弹簧,共同驱动1 只扫臂。图中R 为弹簧与扫臂连接点到支持中轴圆心的距离,r 为弹簧半径。

图1 RSEA 缓冲装置结构Fig.1 The structure of RSEA buffer mechanism
在捕获过程,被捕获卫星与双臂空间机器人机械臂末端发生接触、碰撞,机械臂关节处会受到很大的冲击力矩,此力矩通过RSEA 缓冲装置的扫臂传递给弹簧,弹簧发生压缩或拉伸,进而吸收冲击能量,实现对关节的保护。在镇定过程,受捕获过程的碰撞冲击影响,空间机器人关节电机开启时关节也受到冲击力矩,若冲击力矩过大而不关停电机,则关节可能发生破坏。因此,有必要根据关节所能承受的最大力矩设置一个关机阈值,当某个关节所受冲击力矩超过阈值时,所有电机关停,此时,RSEA 缓冲装置内的弹簧将提供弹力缓冲冲击力矩。然而,若只设置一个关机阈值,电机将频繁开关机,影响电机使用寿命。因此,考虑同时设置开、关机阈值。
2 动力学建模
含缓冲装置双臂空间机器人系统与被捕获卫星系统的模型如图2所示。取O0、Os、Oi(i= 1,2…6)分别为基座质心、卫星质心、关节铰几何中心;取XOY、X0O0Y0、X s Os Ys、X i Oi Yi(i= 1,2…6)分别为系统惯性参考坐标系、基座质心坐标系、卫星质心坐标系、关节中心坐标系;取bL、bR、bL′、bR′分别为机械臂左右侧末端、卫星左右侧末端。
定义本文符号:假设基座质量、转动惯量和质心O0到O1或O4的距离分别为m0、I0、L0;卫星质量、转动惯量和质心到两侧末端的距离分别为ms、Is、ds;各臂杆质量、转动惯量、长度分别为mi、Ii、Li(i= 1,2…6);关节铰中心Oi到臂杆i质心的距离为d i(i= 1,2…6);关 节 电 机 转 子 的 转 动 惯 量 为I mi(i= 1,2…6);基座姿态角、卫星姿态角、关节转角和电机转角分别为θ0、θ s、θ i、θmi(i= 1,2…6);RSEA中弹簧刚度为k si(i= 1,2…6);基座质心O0与O1或O4连线相对于x0轴的夹角分别为ρ1、ρ2;基座质心矢径和卫星质心矢径分别为r0、rs;各臂杆质心矢径为ri(i= 1,2…6);机械臂左右侧末端矢径、卫星左右侧末端矢径分别为rbL、rbR、rb′L、rb′R。

图2 含RSEA 的双臂空间机器人系统与被捕获卫星系统Fig.2 Dual-arm space robot system with RSEA and captured satellite system
根据系统在惯性坐标系中的几何位置关系,可得到空间机器人系统动能Tr与卫星系统动能Ts为:

式中,ωi(i=0,1…6)、ωmj(j=1,2…6)、ωs分别表示基座角速度、电机角速度、卫星角速度。
空间机器人、卫星末端速度与广义速度的关系:

忽略太空微重力,空间机器人系统势能Ur只与RSEA 的弹性势能相关,卫星系统势能Us为零,有:

式中,ΔxLi=-ΔxRi=Rsinφi表示第i个RSEA 挡块上左右弹簧的变形量,φi为扫臂与输入圆盘的角度差。
根据第二类拉格朗日方程,结合式(1)~(3),推导出捕获操作前含RSEA 的双臂空间机器人系统动力学方程及卫星系统动力学方程如下:
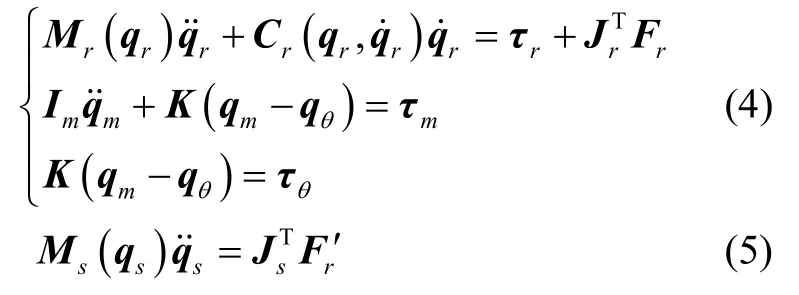
式中,M r(qr) ∈R9×9、M s(qs) ∈R3×3分别为空间机器人系统和卫星系统具有对称、正定性的惯量阵;为空间机器人系统包含科氏力和离心力阵;为电机转角列向量;qθ=[θ1,θ2,θ3,θ4,θ5,θ6]T为关节转角列向量;为基座控制力矩列向量,τL=[τ1,τ2,τ3]T、τR=[τ4,τ5,τ6]T分别为左右侧空间机器人机械臂控制力矩列向量;Im=diag (I m1,I m2,I m3,I m4,I m5,Im6)为电机转动惯量阵;K=diag (k1,k2,k3,k4,k5,k6)为关节等效刚度阵;Fr、Fr′∈R6×1分别为空间机器人和卫星上的作用力和反作用力列向量,且满足Fr=-Fr′。
由于空间机械臂与卫星之间的相互作用力,两者运动状态发生变化。卫星末端反作用力可分解为:

结合式(4)~(6)可得:

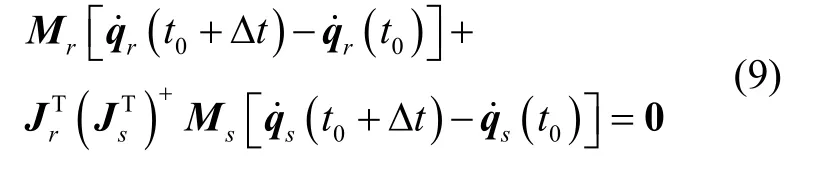
由动量定理,对式(7)两端积分得:
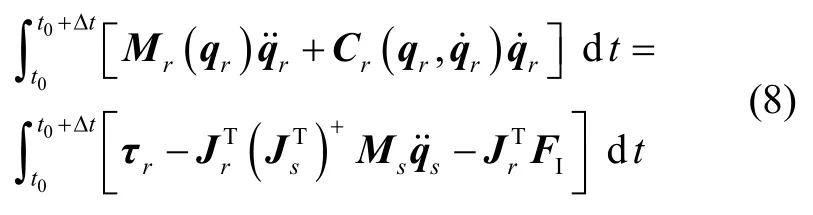
式中,t0为碰撞发生前的时刻,Δt为碰撞时间。由于Δt非常小,可近似认为该时段系统广义坐标不发生突变,只有广义加速度和广义速度发生突变。同时,在碰撞时刻,空间机器人关节电机处于关停状态,以避免其受到过大冲击力。另外,由于FI远小于冲击力,故内力项FI可省略。式(8)可近似为:
捕获完成后,双臂空间机器人与卫星锁紧。由左、右机械臂的运动关系,连体坐标系X0O0Y0下有:

定义qL=[x0,y0,θ0,θLT]T为闭链系统广义坐标,由式(10)可得:

考虑机械臂左侧末端与卫星左侧末端运动关系,结合式(10)可得:

由式(12)可得:

把式(11)(13)代入式(9)得:


由于Δt很小,碰撞力Fr可表示为:

对式(11)(13)求导,整理后得:

由式(11)(13)(17)(7)得:

为得到完全能控的混合体系统动力学方程,将式(18)写成如下分块形式:
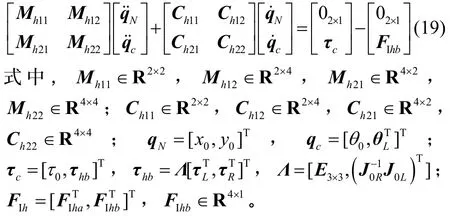
由式(19)可得到闭链混合体系统完全能控形式的动力学方程为:
3 控制器设计
3.1 快变子系统控制器设计
闭链混合体控制器包含快慢变子系统控制器,由此关节驱动电机总的输出力矩可表示为:

式中,τs∈R6×1为慢变子系统控制力矩,τf∈R6×1为快变子系统控制力矩。
定义正比例因子ε及正定对角阵K1,其与关节等效刚度阵K的关系如下:

定义弹簧弹力Tθ=K(q m-qθ)为快变量,并为快变子系统设计如下速度差值反馈控制:

式中,Kf=K2/ε,K2∈R6×6为正定对角阵。结合式(20)~(23),解得快变子系统动力学方程:

由式(22)可知,ε趋近于0 时,K趋近于无穷,电机与机械臂关节之间可等效为刚性连接,结合式(20)(21)可解得慢变子系统动力学方程:

式中,M cθ=M c+Imθ,C cθ为Cc中qm=qθ时对应矩阵;Imθ=[04×1,Imθ1]T,Imθ1= [ 03×1,(ΛIm)T]T,τsθ=[τ0,(Λτs)T]T。
3.2 慢变子系统控制器设计
考虑空间机器人捕获操作过程存在碰撞冲击,有必要定义有界扰动项,系统不确定项:

结合式(26),式(25)写为:

其满足如下结构特性:
特性1满足一致有界性,即:

其中Mm、MM、Cm为正常数。
特性2矩阵满足斜对称性,适当选取,对于任意的z∈R4×1,有:
假设1系统速度满足有界性,即:
引理1若定义一个连续函数f(t),其满足f(t) ∈L∞n、,则有
引理2若定义一个连续函数f(t)满足α为一个数,且连续,则有
定义系统期望位置、速度、加速度分别为qcd、设计如下控制力矩:

式中,z为定义的状态向量,L=lH4×4,l>0。
同时,对系统不确定项进行估计得到:

式中,p为定义的状态向量,φ为对称正定矩阵。
定理1给定初始状态向量y,若其所在区域满足则 有即在式(28)的控制力矩作用下,系统满足稳定性要求。其中,Kp>u,u是对称正定矩阵。
证明结合式(28) (29)可消去状态向量z:

又结合式(27)可得:

由式(25)(28)得到:

定义Lyapunov 函数:
式(34)可写成如下形式:

式(35)满足:

对式(34)求导,由性质2、式(32)(33),可得:

根据式(37)可定义如下等式:
由式(38)可解得:

根据性质1,可得:


结合式(41)(40)可写成:
由定理1,式(42)可写成:

结合定理1、式(43)可知上述Lyapunov 函数负定,、e、、ed有界,结合式(32)(33)知、也有界。

结合式(42)可得:

式中,h(t) =F(t) -ed(t)。

结合式(36)(43)(46)可知,若满足:

则系统为半全局渐近稳定,证毕。
由式(24)可知,快变子系统的控制力矩为τs,而实际设计的是τsθ,因此把τsθ分解为,其中τbsθ∈R3×1,由前面可知τsθ=[τ0,(Λτs)T]T,结合加权最小范数法,解得:

式中,W∈R6×6为对称正定的权值矩阵。
4 仿真校验
4.1 碰撞过程RSEA 缓存性能模拟
双臂空间机器人捕获卫星操作如图2所示,空间机器人系统参数如下:m0= 80 kg,L0= 1.1 m,mi=6 kg (i=1,2,4,5),Li= 1 m (i= 1,2,4,5),di=0.5 m (i=1,2,4,5),mj= 3 kg (j=3,6),Lj= 0.5 m(j= 3,6),dj= 0.25 m (j= 3,6),ρ1= 2.79 rad,ρ2= 0.35 rad,ksi=650 N/m (i= 1,2…6),Ii=1 kg ⋅m2(i= 1,2,4,5),Imi= 0.05 kg ⋅ m2(i= 1,2…6),Ij= 0.5 kg ⋅m2(j=3,6),I0= 40 kg ⋅ m2。卫星系统参数如下:ms= 20 kg,ds= 0.25 m,Is= 15 kg ⋅ m2。在捕获操作前,选取双臂 空 间 机 器 人 的 初 始 位 置 为qr= [0.3,0.3,10 °,120 °,- 60 °,- 60 °,60 °,60 °,60 °]T。关节等效刚度计算公式如下:

式中,Ks=diag (k s1,k s2,k s3,k s4,k s5,ks6),r= 0.01 m,R=0.15 m,φ= diag (3 °,2 °,1 °,- 3 °,- 2 °,- 1°)为机 械臂末端载荷Fr=[20 N,20 N,0N,20 N,20 N,0N]T时扫臂转角。
为验证RSEA 缓冲装置的缓冲性能,在捕获非合作卫星的碰撞过程中,采用不同卫星速度,对关节力矩仿真,结果如表1所示,卫星速度第一、二项表示线速度,单位为m/s,第三项为角速度,单位为rad/s,所受冲击力矩单位为N ⋅ m。由表1可见,带有缓冲装置空间机器人在捕获碰撞过程中可以减少50.2%以上的关节冲击力矩。
4.2 镇定过程减撞柔顺控制策略性能仿真
选取系统的减撞柔顺控制策略参数如下:Kv=diag (2000,2000,2000,2000),φ=diag (2,2,2,2),Kp=diag (9000,9000,9000,9000),l=500,ε=0.5,L=diag (500,500,500,500)。被捕获卫星初始速度=[0.3 m/s,0.3 m/s,0.1 rad/s ]T。仿真时间为30s。
假设双臂空间机器人关节电机至多可承受75 N ⋅ m的冲击力矩,设定关节电机关机阈值70 N ⋅ m,开机阈值20 N ⋅ m,开启与RSEA 缓冲装置配合的减撞柔顺控制策略,仿真结果如图3~8 所示。

图3 开启减撞柔顺控制关节电机开关机信号Fig.3 Turn on collision mitigation compliance control joint motor signal

图4 开启减撞柔顺控制关节力矩Fig.4 Turn on collision mitigation compliance control joint torque
其中,图3、图4为开启减撞柔顺控制关节电机开关机信号及关节所受冲击力矩,由图4可知,各关节所受冲击力矩始终保持在安全阈值内。图5、图6为采用速度重构及不确定项估计控制方案所得轨迹跟踪效果,可知,控制器不断地趋向最优状态,实现控制的最优化。

图5 开启减撞柔顺控制基座姿态角位移Fig.5 Turn on collision mitigation compliance control base attitude angle
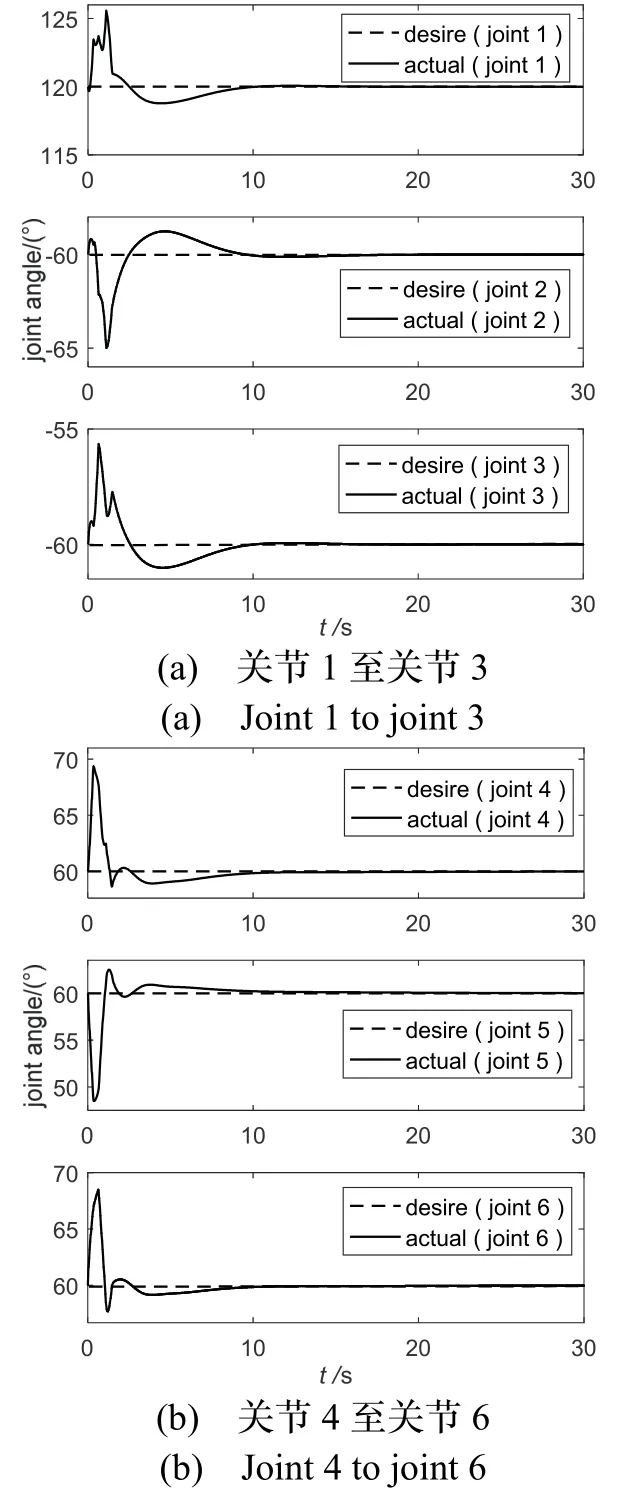
图6 开启减撞柔顺控制关节角位移Fig.6 Turn on collision mitigation compliance control joint angle
图7、图8为关闭快变子控制器的轨迹跟踪效果,可知,由于未抑制系统的弹性振动,末端执行器发生剧烈振动,严重影响空间机器人双臂捕获过程可靠性。
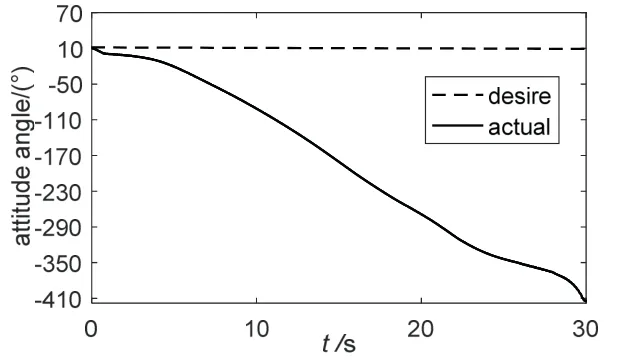
图7 关闭快变子控制器基座姿态角位移Fig.7 Turn off fast transformer controller base attitude angle
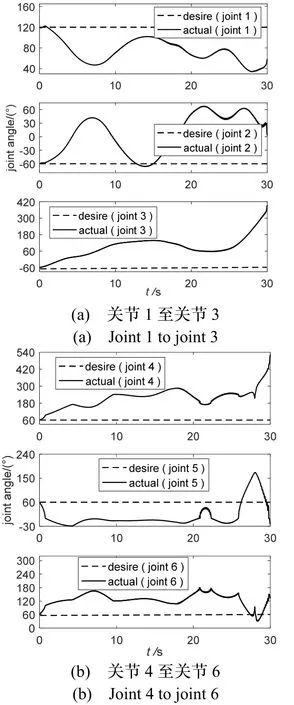
图8 关闭快变子控制器关节角位移Fig.8 Turn off fast transformer controller joint angle
6 结 论
在空间机器人捕获非合作卫星的碰撞过程及捕获后的镇定过程,为保护机械臂关节不受冲击破坏,考虑在双臂空间机器人关节电机与机械臂之间加入一种RSEA 缓冲装置,并提出了与之结合的减撞柔顺控制策略。经过仿真实验可知,含RSEA 缓冲装置双臂空间机器人在捕获碰撞过程可以减小50.2%至57.3%的关节冲击力矩,表现出良好的缓冲性能,结合减撞柔顺控制策略后,还能在镇定过程冲击能量过大时刻应时开、关双臂空间机器人关节电机,实现对关节的保护。另外,基于速度重构及不确定估计的减撞柔顺控制方案,将速度重构项、不确定估计项与控制器结合,优化了控制器对动力学模型不确定性非常敏感及速度测量不准确的问题。
参考文献(References):
[1] Pedro R P,Marco D S,Roberto L.Velocity matching compliant control for a space robot during capture of a free-floating target[C]//IEEE Aerospace Conference,MT,USA,March 3-10,2018.
[2] 郁丰,赵依,汪永生.基于点云矩形面特征的故障航天器位姿测量[J].中国惯性技术学报,2018,26(2):255-260.Yu F,Zhao Y,Wang Y.Pose measurement for malfunctioned spacecraft by utilizing rectangular feature extracted from point cloud[J].Journal of Chinese Inertial Technology,2018,26(2): 255-260.
[3] Malik M A,Jurek Z S.Guidance and control of a robot capturing an uncooperative space target[J].Journal of Intelligent and Robotic Systems,2019,93(3): 713-721.
[4] 胡建,白瑜亮,王小刚,等.航天器有限时间自适应容错姿态控制[J].中国惯性技术学报,2018,26(1): 92-97.Hu J,Bai Y,Wang X,et al.Finite-time adaptive fault tolerant attitude control of spacecraft[J].Journal of Chinese Inertial Technology,2018,26(1): 92-97.
[5] Rekleitis G,Papadopoulos E.On-orbit cooperating space robotic servicers handling a passive object[J].IEEE Transactions on Aerospace and Electronic Systems,2015,51(2): 802-814.
[6] 程靖,陈力.空间机器人双臂捕获航天器后姿态管理、辅助对接操作一体化ELM 神经网络控制[J].机器人,2017(5): 724-732.Cheng J,Chen L.Elm neural network control of attitude management and auxiliary docking maneuver after dual-arm space robot capturing spacecraft[J].Robot,2017(5): 724-732.
[7] 徐文福,刘厚德,李成,等.双臂空间机器人捕获运动目标的自主路径规划[J].机器人,2012,34(6): 704-714.Xu W,Liu H,Li C,et al.Autonomous path planning of dual-arm space robot for capturing moving target[J].Robot,2012,34(6): 704-714.
[8] Lampariello R,Hirzinger G.Generating feasible trajectories for autonomous on-orbit grasping of spinning debris in a useful time[C]//IEEE/RSJ Int Conference on Intelligent Robots and Systems (IROS).Tokyo,Japan,November 3-7,2013.
[9] Takahash R,Ise H,Sato D,et al.Hydrid simulation of a dual-arm space robot colliding with a floating object[C]//IEEE International Conference on Robotics and Automation.Pasadena,USA,May 19-23,2008.
[10] Sariyildiz E,Chen G,Yu H Y.An acceleration based robust motion controller design for a novel series elastic actuator[J].IEEE Transactions on Industrial Electronics,2016,63(3): 1900-1910.
[11] Boufadene M,Belkheiri M,Rabhi A.Adaptive nonlinear observer augmented by radial basis neural network for a nonlinear sensor less control of an induction machine[J].International Journal of Automation and Control,2018,12(1): 27-43.
[12] Alexander P,Thomas N,Sandra H,et al.Dynamically consistent online adaptation of fast motions for robotic manipulators[J].IEEE Transactions on Robotics,2018,34(1): 166-182.
[13] He W,Dong Y T,Sun C Y.Adaptive neural impedance control of a robotic manipulator with input saturation[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2016,46(3): 334-344.
