基于全域视角的城市核心区域地下空间辅助规划系统
2020-12-07李天骄韩可为
李天骄 韩可为
摘 要: 针对传统地下空间辅助规划系统存在运行耗时长的问题,提出基于全域视角的城市核心区域地下空间辅助规划系统。为了缩短系统运行时长,设计系统硬件驱动电路,分别为78系列三端集成稳压器大电流供电电路、开关电源DC变换器电路和单片机采样电路。系统软件由空间数据库子系统、数据库管理子系统、模型库管理子系统、空间辅助规划数据库、总控模块构成,实现数据库调用。软、硬件结合,完成基于全域视角的城市核心区域地下空间辅助规划系统的设计。实验部分分别测试两个系统的运行耗时,结果显示,文中所设计系统运行耗时保持在10 ms左右,传统基于空间数据技术的城市核心区域地下空间辅助规划系统运行耗时在12 ms左右。由此可知,该文所设计系统运行耗时更短,且符合设计需求。
关键词: 空间辅助规划; 地下空间规划; 硬件驱动电路; 数据库调用; 系统设计; 运行耗时测试
中图分类号: TN911?34; TP311.52 文献标识码: A 文章编号: 1004?373X(2020)22?0121?03
Abstract: Since the traditional underground space auxiliary planning system needs long running time, the urban core area underground space auxiliary planning system based on the global perspective is put forward in this paper. In order to shorten the running time of the system, the hardware driving circuits are designed, which are high current power supply circuit of three?terminal integrated voltage regulator in 78 series, switching power DC converter circuit and single chip sampling circuit. The system software is composed of spatial database subsystem, database management subsystem, model database management subsystem, spatial auxiliary planning database and general control module to realize the database call. Based on the combination of software and hardware, the design of underground space auxiliary planning system for urban core area is completed. The running times of the two systems were tested respectively in an experiment. The results show that the running time of the system designed in this paper is about 10 ms, and the running time of the traditional urban core area underground space auxiliary planning system based on spatial data technology is about 12 ms. It can be seen that the system designed in this paper takes less time to run and can meet the design requirement.
Keywords: space aided planning; underground space planning; hardware drive circuit; database call; system design; operation time?consuming test
0 引 言
城市核心区域地下空间辅助规划是一个城市设计取得成功的关键,而空间辅助规划系统刚好提供了一种基于空间信息获取的方法。空间辅助规划系统是在空间数据技术基础上发展起来的。空间数据技术起步较晚,其可完成复杂的空间分析,客观地反应出不同时空尺度下的变化趋势,从而为决策者提供有效准确的信息[1]。但空间数据技术还处于探索阶段,存在以下几个方面的缺陷:无法组织海量模型数据;无法直观、有效地展现空间数据成果;无法高效调度数据库。本次研究主要针对上述问题提出基于全域视角的城市核心区域地下空间辅助规划系统设计,主要设计内容:研究城市核心区域地下空间辅助规划系统,并做大量工作解决传统系统运行时间较长的问题。基于传统系统的工作原理,给出系统设计的最优方案。硬件驱动电路是本次设计的重点,先确定各个模块的设备选型连接方式,再根據一定的空间辅助规划流程设计软件模块。
1 硬件结构设计
基于全域视角的城市核心区域地下空间辅助规划系统的硬件驱动电路由三部分组成,分别为78系列三端集成稳压器大电流供电电路、开关电源DC变换器电路和单片机采样电路[2]。
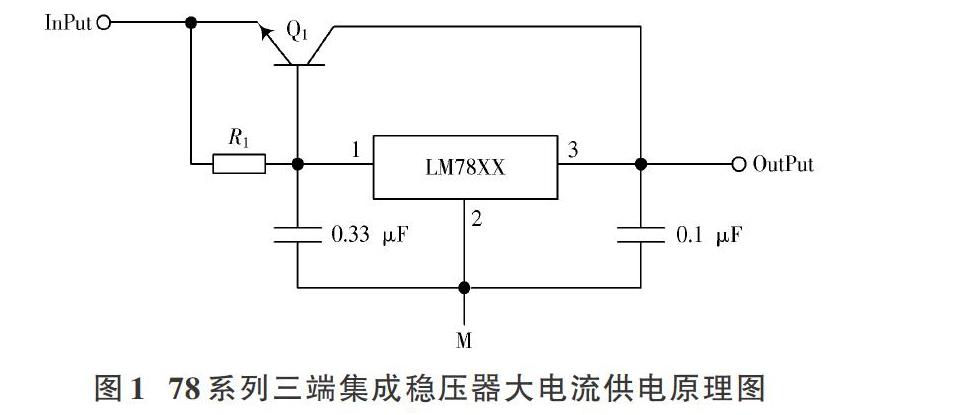
电机采用24 V电源,单片机系统需要5 V电源,电机和电源都需要提供3 A电源,且两路电流不可超过1 A,故采用78系列三端集成稳压电路提供1 A以上的用电,并在三端集成稳压电路上配备加装大功率分流三极管,如图1所示。
电流增大,大功率三极管所消耗的能量就越大,从而导致电源效率降低,出现严重干扰问题[3]。为满足多路不同的电压输出要求,使用多级稳压电路的方式,降低系统电路复杂程度,提高系统稳定性。
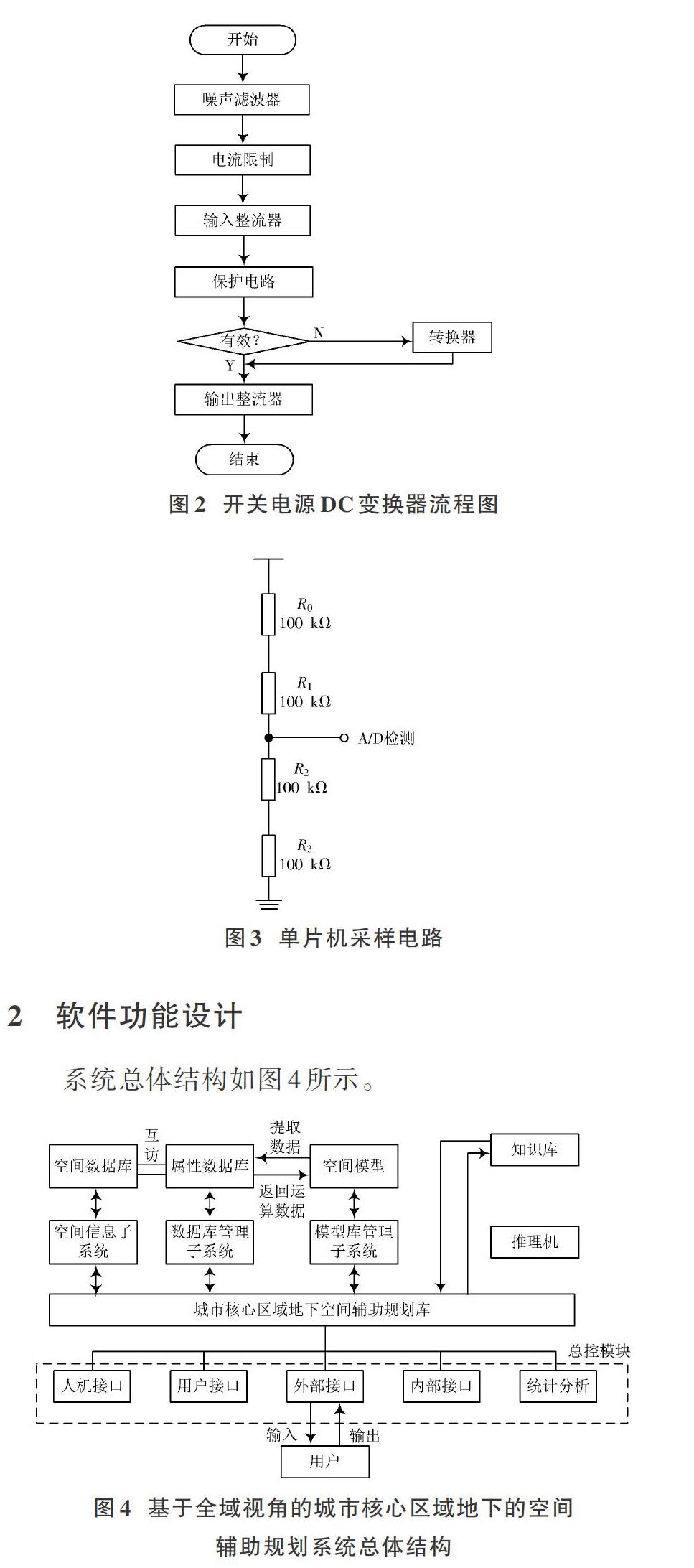
系统开关电源采用DC变换器,它能对外输出5 V,12 V多路隔离直流电。其工作原理为:将高频率的交流电提供给变压器,经过变压后,产生多组电压,再通过电路控制开关高速导通,将直流电转换成高频交流电,以达到稳定输出的目的[4]。开关变压器的次级分为多个绕组和一个绕组,以满足输出需求。开关电源流程图如图2所示。
开关电源DC变换器可感应出不同幅度的高频电压,若想输入直流24 V,就需要经过去噪滤波处理,再通过高频PWM信号控制开关管,直至整流滤波信号稳定[5]。图2中的输出部分需要通过电路反馈给控制电路,才能保证电流稳定输出。
系统单片机采样电路如图3所示。
由ADC0809将采样模拟信号的转换结果送至单片机P0口[6]。该口用于判断电源状态。若蓄电池处于放电状态,说明极间电压不稳,可能会出现误判的现象[7]。
1) 空间数据库子系统由区域背景专题图库和各种城市核心区域地下空间辅助规划信息数据组成[9]。其中,空间信息数据中包含决策者需要迅速查找的常用信息。
2) 数据库管理子系统具有以下几个功能:提供基本数据对象;提供有关数据检查;提供数据字典[10?11]。
3) 模型库管理子系统具有组合功能,可适应多种不同的应用环境。
4) 城市核心区域地下空间辅助规划库由通用模型和暂时性中间模型组成,它可以将城市核心区域地下空间规划信息从不同角度进行分类集成,用以生成临时模型分析使用[12]。若要修改模型,可以依据系统索引加以说明,经过确认后,从模型库中选择指定的模型,通过数据库提取所需参数,转送到系统,以供参考。需要注意的是,系统传来的修改模型形式要按照语义分析提出的要求修改,经过审查后,再使用索引替换原来的部分,最终完成新模型的构建[13]。
5) 总控模块用于目标分析和问题分解,其中,人机接口是整个系统与用户交互的界面,可以以多种形式表达用户的问题[14]。在整个系统推理过程中,允许决策者和接受决策者直接干预。系统的运行结果会以熟悉的形式显示,并对其进行阐述。用户接口是负责提供友好图形界面的,用户可以通过用户接口选择执行项目,比如,功能和空间信息等[15]。内部接口是系统与公共接口的连接部分,也是系统接口。它是空间辅助规划系统的核心部分,可实现内部数据与外部数据的调用和连接。
由此,完成基于全域视角的城市核心区域地下空间辅助规划系统的软件设计。
3 实 验
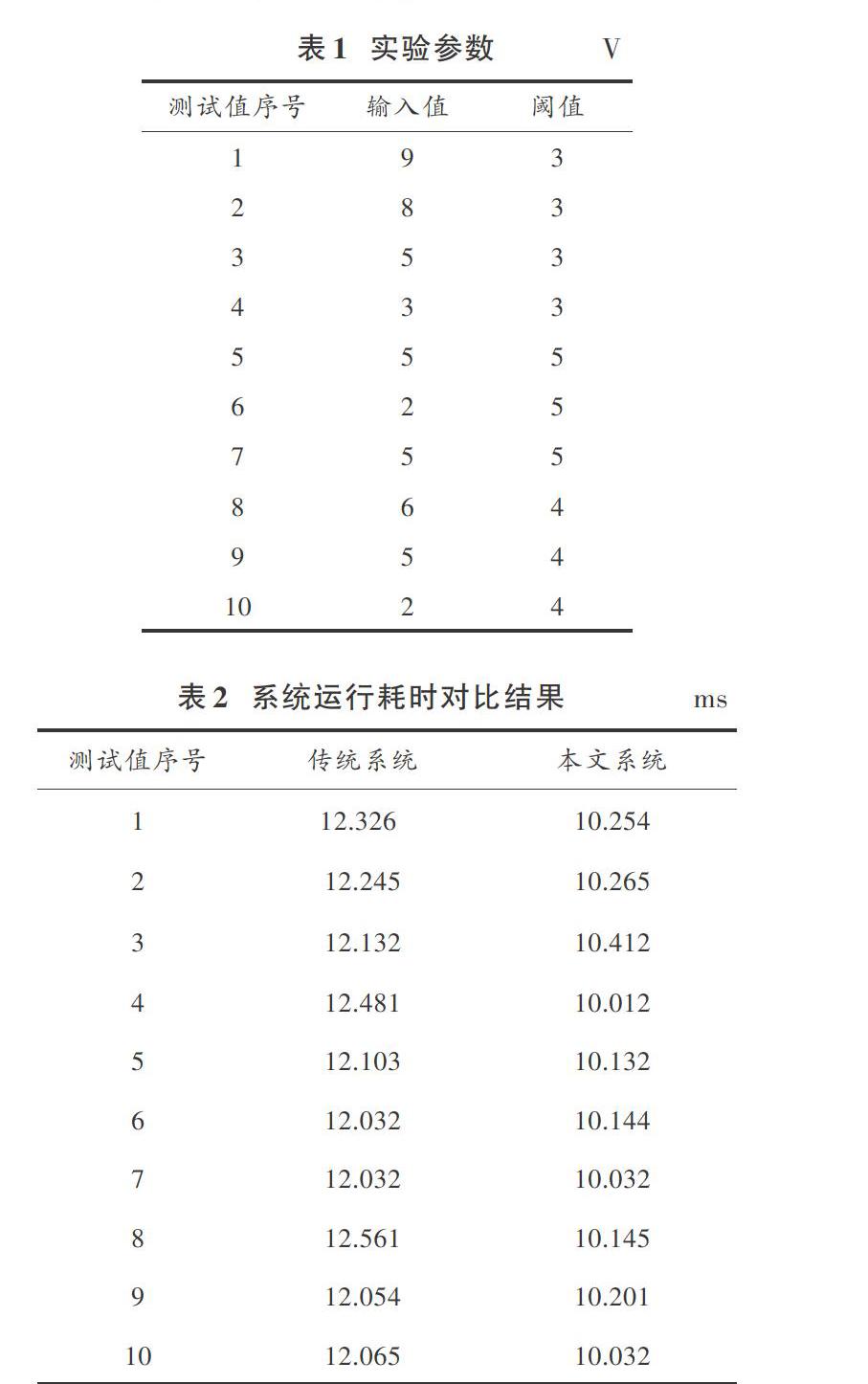
为了验证所提的基于全域视角的城市核心区域地下空间辅助规划系统设计的合理性,设置了系统运行耗时对比实验,检测基于空间数据技术的城市核心区域地下空间辅助规划系统与所提系统测试的10个测试值的运行时长。在空间辅助规划数据库中,随机选取10个测试值,如表1所示。
3.1 实验环境
本次实验选择在以下环境中完成:
1) 数据服务器:Intel Xeon 3.0 M缓存以上的CPU、2 GB以上内存、250 GB以上的存储器、1 000M网卡。
2) Web服务器:Intel Xeon 3.0 M缓存以上的CPU、2 GB以上内存、250 GB以上的存储器、100M网卡。
3) 互联网客户端:P4 2 GHz的CPU ,512 MB内存、40 GB存储器、 64 MB显卡、10M网卡。
4) 业务客户端:P4 2.8 GHz的CPU、1 GB内存、128 MB以上的显卡、100M网卡。
3.2 实验结果
实验中分别测试传统基于空间数据技术的城市核心区域地下空间辅助规划系统与基于全域视角的城市核心区域地下空间辅助规划系统的运行耗时。表2为2个系统的运行耗时对比结果。
4 结 语
分析早年数据得知传统基于空间数据技术的城市核心区域地下空间辅助规划系统存在的问题。在研究传统系统应用现状的基础上,分析城市核心区域地下空间辅助规划的需求,介绍系统设计的相关概念,并详细阐述系统结构。但在实验中发现,该系统还存在一定的不足,由于资料和实验设备水平有限,在系统建设的过程中,还未进一步研究系统的数据基础。所以在今后的系统中,要改进空间辅助规划数据库的内容,特别是模型数据库的构建,以期本次研究的基于全域视角的城市核心区域地下空间辅助规划系统能为决策者提供更加完善的规划方案。
参考文献
[1] 叶杰,江海燕,张俊杰.“大湾区”背景下广州都市乡村振兴转型发展策略:基于全域风景化视角[J].中国园林,2019,35(5):63?68.
[2] 皮常玲,郑向敏.基于域变视角的全域旅游安全管理体系研究[J].河南大学学报(社会科学版),2018,58(1):37?44.
[3] 蔡永龙,陈忠暖,刘松,等.快速铁路开通对海南岛空间可达性格局和空间公平性的影响[J].经济地理,2018,38(1):36?45.
[4] 方永恒,许莹.基于GIS的文化遗址园区空间分布规划研究[J].西安建筑科技大学学报(自然科学版),2017,49(5):734?739.
[5] 古恒宇,黄铎,沈体雁,等.多源城市数据驱动下城市设计中的空间句法模型校核及应用研究[J].规划师,2019,35(5):67?73.
[6] 姚其家,戈新生.基于微分几何的蛇板系统动力学建模与运动规划[J].应用数学和力学,2018(1):29?40.
[7] 杨超杰,裴以建,刘朋.改进粒子群算法的三维空间路径规划研究[J].计算机工程与应用,2019,55(11):117?122.
[8] 李琚陈,曾谊晖.六关节工业机器人工作空间及轨迹规划仿真[J].食品与机械,2017,33(10):98?103.
[9] 崔嵩,刘林,王宏强.多雷达空间目标协同探测任务规划研究[J].现代雷达,2019,41(5):8?11.
[10] 李福映,肖健,郑清菁.转型背景下存量产业空间的整合重构与规划应对[J].规划师,2019,35(5):74?80.
[11] 张骏,郑楠,黄崇轩.城市中心区非机动车系统设计优化与探索[J].北京航空航天大学学报,2019,45(6):1218?1231.
[12] 王鸣岐,杨潇.“多规合一”的海洋空间规划体系设计初步研究[J].海洋通报,2017,36(6):675?681.
[13] 贾永军,于楠,贺太平,等.新一代基于模型的迭代重组对低剂量肺部CT条件下计算机辅助检测系统气道分析的影响[J].临床放射学杂志,2018,37(8):1386?1390.
[14] 陆晓曦.文化社区:城市核心区基层综合性文化服务中心建设的样本:以北京市东城区为例[J].图书馆杂志,2017,36(1):38?44.
[15] 王志杰,周平,刘川昆,等.海绵城市潜力评估方法及地下排水系统[J].哈尔滨工业大学学报,2018,50(3):118?127.
