基于5G和北斗系统的高楼清洁机器人的设计和研究
2020-11-26荣忆宁邓仕明
龙 鑫,袁 练,荣忆宁,邓仕明,陈 艳
(湖南信息学院,湖南 长沙 410151)
0 引 言
本文旨在设计一个城市高层建筑的机器人自动清洁系统,替代高风险的人工作业和成本高昂的自动擦窗机作业,并大幅提高清洁效率。目前,壁面清洁机器人在发展过程中受到多种因素的制约,如不具备针对各类壁面的通用性、研发周期长以及建筑物壁面环境复杂恶劣等。因此,以北斗定位导航作为机器人的导引系统,将北斗系统、机器人、物联网、智能控制以及机器视觉等技术结合起来,打造一款高楼清洁机器人,以高效安全地管理和处理区域卫生,对解决现实问题有着深刻的意义。
1 机器整体介绍
此次设计的是一种攀爬机器人,包括机器人主体、顶盖以及攀爬机械臂。机器人主体的内部中心处设有水箱,水箱的前侧从左至右依次设有控制机构和真空机构,后侧安装有驱动机构,底部两侧设有防跌落传感器,另贴近水箱的底部安装有清洗盘。清洗盘的底部开设有喷孔,且安装有清洁刷。整体装置可实现幕墙清洗和检测等高空作业[1]。攀爬机械臂的设计保证了机器人使用的方便和灵活,增强了使用的安全性,可替换风险程度较高的高空蜘蛛人清洁作业。由于具有较高的稳定性和实用性,因此它具有一定的推广价值。
2 机器运动过程
使用机器人时,通过控制机构接收外部控制端的控制信号。北斗为机器人提供实时的位置信息和导航信息,由机器人主体内部的驱动机构驱动攀爬机械臂实现攀爬行走动作[2]。攀爬机械臂底端的真空吸盘与真空机构之间通过导气管连接。真空机构具有自动探测补偿吸附力,实时监控气压状况,利用真空吸盘的真空吸附原理吸附在玻璃幕墙表面。机器人主体前侧的监控窗口可以观察玻璃幕墙的细节,便于远程遥控控制机器人主体清洁盘底部的喷孔,配合清洁刷清洗玻璃幕墙[3]。此外,防跌落传感器可以有效感知幕墙边缘,牵引挂环可以连接安全吊具,防止机器人高空攀爬时的意外脱落。
3 机器主要功能设计实现和分析
机器人按照规划区位路线进行规律运行时,具有对物体的辨别、判断、处理以及执行的动作能力,具有发现目标并执行动作的操作能力,还具有远程集中管理等系列集成功能。机器运动中央管控可视化界面,如图1所示。
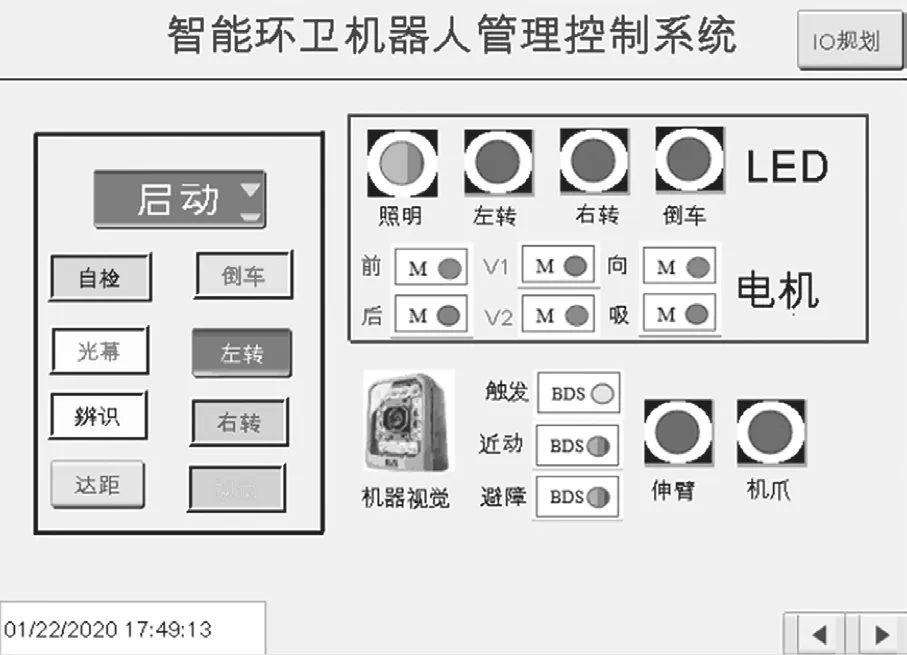
图1 机器运动中央管控可视化界面
3.1 电机动作系统分析
根据机器人要达到的运动控制功能可知,系统的主要控制对象是动力驱动电机、吸盘电吸电机、方向控制电机、气压泵、伸缩气压控制阀以及抓手气压控制阀。驱动电机为小车提供前后距离方向运动的动力;吸盘电吸电机是参考吸尘器的原理所设计的吸盘的动力源;方向控制电机是小车机器人的转盘控制动力源;气压泵为机器人提供整体执行动作驱动执行逻辑,包括吸盘臂管的伸缩和吸盘顶部的抓手动作等,均采取气压驱动。
3.2 传感检测系统
传感检测系统对于机器人而言相当于人的感观,是机器人获取外界数据信息的直接介质。本机器人系统将采用贝加莱集成机器视觉,应用其智能传感器实现机器视觉。通过多核处理器和集成的FPGA图像预处理,可实现多功能的智能校对和识别。此外,对前进路线障碍与目标的识取采用红外光幕+贝加莱机器视觉实现,同时对目标的判断、识别、校对以及智能路线规划将大量运用机器智能视觉和AI处理。智能传感通过红外光幕获取目标,通过智能视觉对比对象并与机器库中的历史对象对比,判断目标是否为清扫对象[4]。例如,机器人通过红外光幕大范围地对外部工作环境进行扫描判断,发现类似目标时通过机器视觉进行确认,然后进行运动并触发执行机构的操作。
3.3 吸盘与机器爪驱动功能分析
本设计对于垃圾物体的拾取收拢采取吸盘和机械爪二元制。轻小垃圾通过吸盘吸取,同时吸盘顶部装取三爪机器手,以抓取收拢较大较重的垃圾。吸盘的伸缩和机械爪的动作都通过气压传动实现。因为气压传动只需空气压缩机就可以源源不断地汲取大气,因此无论从机身重量、经济还是能源获取方面而言,都是较优的选择。
3.4 整体机身结构
设计的机器人拥有类似小车一样的架构作为机身底盘,同时拥有智能控制系统、智能传感检测系统、气压传动执行系统、吸盘机械爪执行机构、收纳箱以及伺服电机驱动系统等。
3.5 远程集中在线管理控制系统
正常状态下,机器被布置在设定区域,根据定义在规划区域巡回运转,并通过实时追踪定位和实时检测反馈机体运行状态信息。而本次设计的系统采取人机界面(HMI)、数据采集以及监视平台进行远程集中在线管理,即通过SCADA系统集中监控管理区域各个工作机器的工作状态、运行状况以及机身各处的状态,从而实现对各工作机器的实时跟踪管理、实时在线检故运维以及实时调节规划和诊断[5]。
4 机器人控制与监视实现
攀爬机器人自主根据AI控制刷洗镜面。为保障它的安全可靠,需实现对机器人实时状态的监控及运行数据的交互,包括机器人的能量、动作、控制输入输出以及机器保护等状态信息。同时,操作员通过机身相机可清晰观察检验机器人刷洗的洁净度,实现全方位机器运行、机器保护以及任务进度状况的监控。这种功能主要依靠人机界面和SCADA数据采集与监视控制系统实现,即对嵌入式AI控制器进行监视控制,同时通过控制器实现对机器人机体的监控。
设计采用具有高可靠、低延时以及海量机器通信不断线特性的5G无线网络进行传输。当机器启动时,智能网关实时采集数据并通过移动通信传输至云端,用户通过PC人机界面实时监控机器。人机界面集控端采用组态软件,开启DHCP设置和ETH设置。Default Gateway为网关路由,IP为192.168.1.117且DNS为ON时,可实现人机界面实时无线监控机器系统。由于系统对网络速度的要求较高,因此采用5G技术为物联环境提供一条高速通路[6]。机器实时无线监控管理如图2所示。
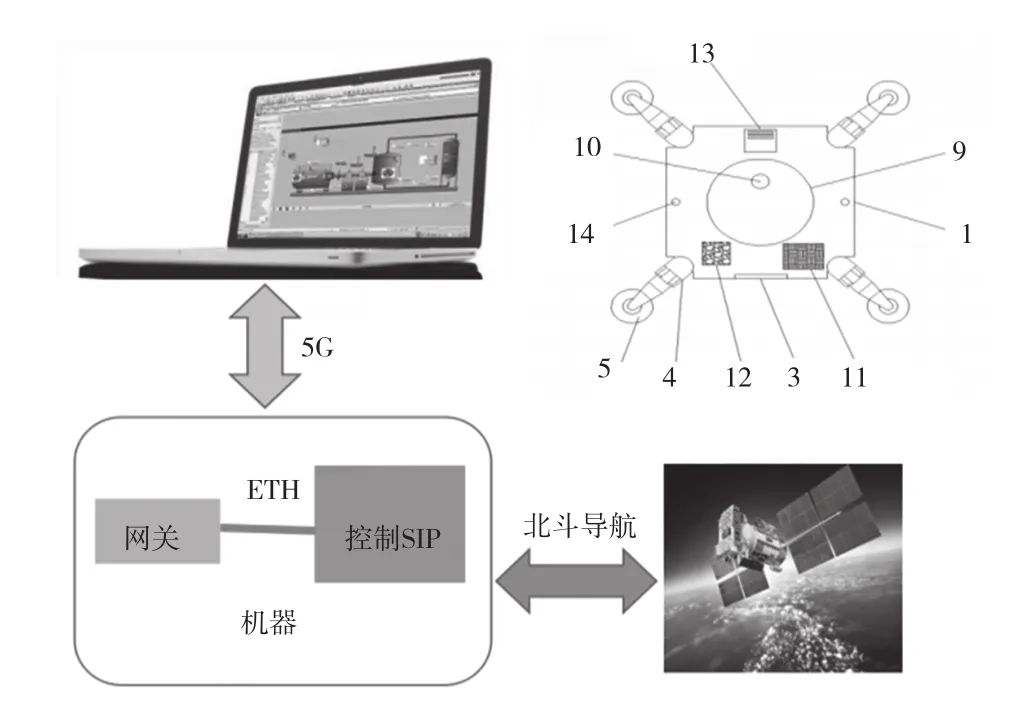
图2 机器实时无线监控管理
5 机器设计与创新
设置攀爬机械臂和驱动机构,由驱动机构驱动攀爬机械臂实现攀爬行走动作,保证了本机器人使用的方便灵活,可替换风险程度较高的高空蜘蛛人清洁作业。真空吸盘与真空机构之间通过导气管连接,而真空机构具有自动探测补偿吸附力,利用真空吸盘的真空吸附原理可吸附在玻璃幕墙表面,从而实现对幕墙清洗、检测等高空作业。通过设置监控窗口可以观察玻璃幕墙的细节,便于远程遥控控制机器人清洁盘底部的喷孔,并配合清洁刷对玻璃幕墙进行精细的清洁。此外,该机器人设置了防跌落传感器和牵引挂环。防跌落传感器可以有效感知幕墙边缘,牵引挂环可以连接安全吊具,防止机器人高空攀爬时意外脱落,增强使用的安全性。
6 结 论
设计紧密结合北斗、5G等技术,致力于为高楼提供一种智能化清洁方案。北斗和5G等越来越多的高科技产物的加入,使得现代化城市的建设越来越智能化和科技化。通过北斗时空实时规划三维定点城市,有助于实现城市的数字化治理。5G的应用则为智慧城市建设提供了一个万物互联的生态圈,实现了实时的数据传输管理。可见,北斗时空+5G生态圈将为智慧城市的建设开启全新的时代。
