四分之一车主动悬架模糊控制
2020-11-20何佳琪刘海龙黄冬梅
何佳琪 刘海龙 黄冬梅

摘要:汽车主动悬架主要影响汽车在行驶过程中对不平路面所产生颠簸的抑制程度和乘坐的舒适度。构建1/4车身主动悬架系统的数学模型,结合现代控制理论,设计汽车主动悬架模糊控制器,利用MATLAB/Simulink仿真模块,在相同的输入下,对汽车主动悬架和被动悬架的车身加速度、悬架动扰度以及轮胎动变形进行性能比较。仿真结果表明,汽车主动悬架模型对于提高汽车的舒适度和驾驶员的操作的稳定性等方面上优于被动悬架模型。此结论对设计汽车主动悬架系统有一定的参考价值。
关键词:MATLAB;汽车主动悬架;模糊控制器
1、引言
汽车悬架主要由弹性元件、减震器、传力装置三部分组成[2],其主要作用是在车轮与车架之间传递一切力以及力矩,缓冲由路面传递到车身的冲击载荷,减轻由此产生的震动,是现代轿车十分关键的部件之一。目前,市场上的汽车悬架系统的种类有许多,根据控制形式不同分为被动式悬架、主动式悬架;根据汽车导向机构不同可分为独立悬架、非独立悬架[5]。随着微处理器的应用,以及作动器、变刚度弹簧,减震器等多领域取得的突破。汽车主动悬架得到了更多的关注。
汽车主动悬架系统是近十几年发展起来的、由电脑控制的一种新型悬架。它汇集了力学和电子学的技术知识,是一种比较复杂的高技术装置。例如装置了主动悬架的法国雪铁龙桑蒂雅,该车悬架系统的中枢是一个微电脑,通过不断接收传感器中传来的数据并与预先设定的临界值进行比较,从而选择相应的悬架状态,目前国内对于汽车悬架的研究已经取得了很多成果[4-5] 。
本课题采用模糊控制,以车身加速度、轮胎动变形和悬架动绕度作为悬架系统性能的评价标准,对1/4车身主动悬架系统的数学模型在MATLAB中进行仿真测试,得到其主动悬架系统性能的动态响应。
2、汽车主动悬架模型
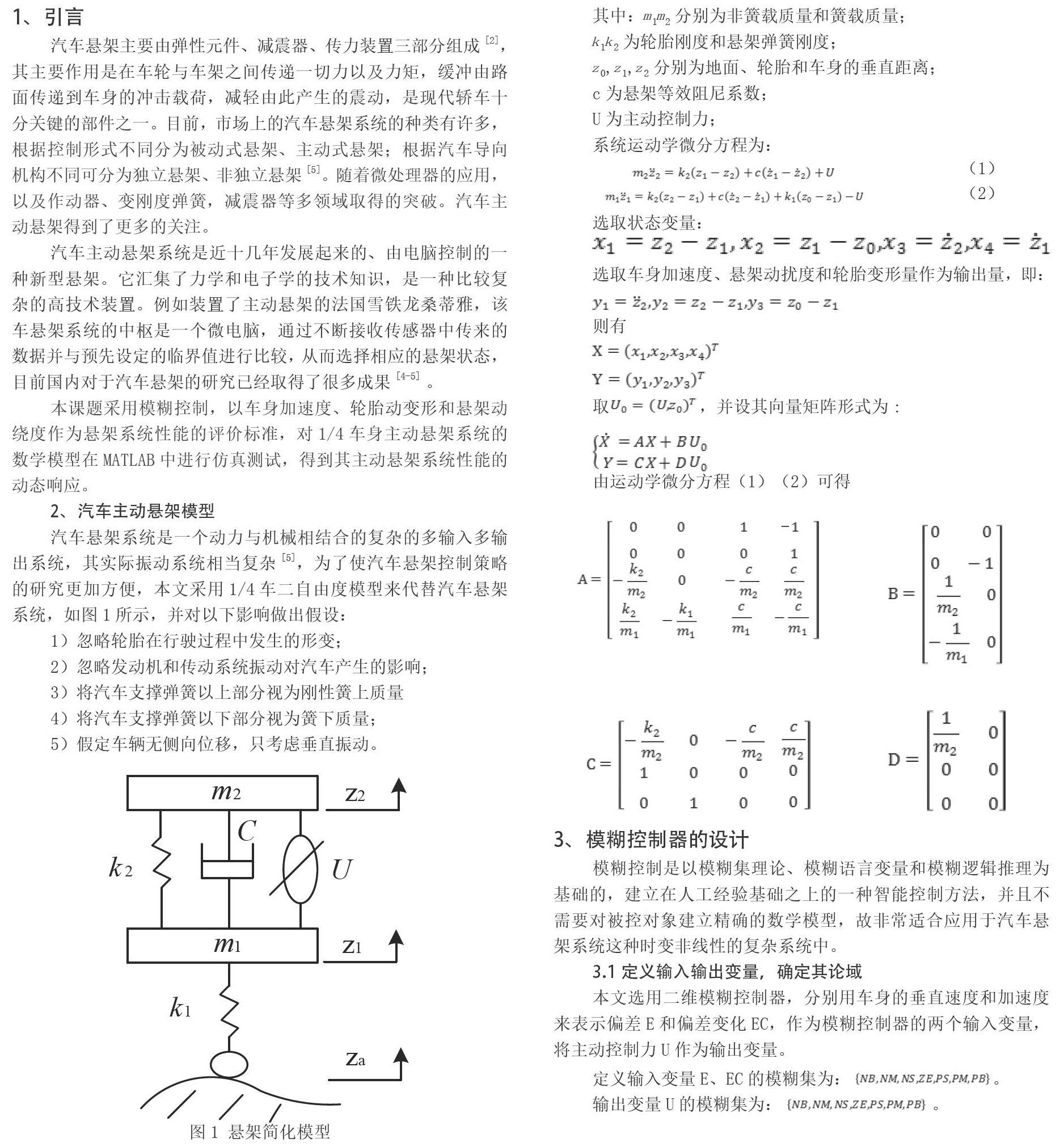
汽车悬架系统是一个动力与机械相结合的复杂的多输入多输出系统,其实际振动系统相当复杂[5],为了使汽车悬架控制策略的研究更加方便,本文采用1/4车二自由度模型来代替汽车悬架系统,如图1所示,并对以下影响做出假设:
1)忽略轮胎在行驶过程中发生的形变;
2)忽略发动机和传动系统振动对汽车产生的影响;
3)将汽车支撑弹簧以上部分视为刚性簧上质量
4)将汽车支撑弹簧以下部分视为簧下质量;
5)假定车辆无侧向位移,只考虑垂直振动。
3、模糊控制器的设计
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的,建立在人工经验基础之上的一种智能控制方法,并且不需要对被控对象建立精确的数学模型,故非常适合应用于汽车悬架系统这种时变非线性的复杂系统中。
3.1 定义输入输出变量,确定其论域
本文选用二维模糊控制器,分别用车身的垂直速度和加速度来表示偏差E和偏差变化EC,作为模糊控制器的两个输入变量,将主动控制力U作为输出变量。
定义输入变量E、EC的模糊集为:{NB,NM,NS,ZE,PS,PM,PB}。
输出变量U的模糊集为:{NB,NM,NS,ZE,PS,PM,PB}。
E、EC的论域为:{-3,-2,-1,0,1,2,3}。
U的论域为:{-3,-2,-1,0,1,2,3}。
3.2 建立隶属函数
隶属度函数是模糊控制的应用基础,通过隶属度函数,可以将论域中的元素映射到0到1之间,继而确定该元素的隶属度。隶属度函数形状多为高斯型或三角形,本文采用三角形隶屬度函数。
3.3 确定控制规则
根据参考文献[1-5]以及实际经验可得到模糊控制规则表如表1所示。
4.5 仿真结果分析
在相同的输入条件下,将主动悬架与被动悬架模型的输出指标进行对比,得到的仿真波形图分别如图6-8所示,输出指标的均方根和最大值如表2所示。
通过图6-8以及表2可以清楚的看出来,相较于被动悬架而言,改善后的模糊控制主动悬架对车身垂直加速度的控制效果有明显的改善,虽然悬架动扰度和轮胎动变形的均方值有微小的增加,但由于增量很小,不影响汽车行驶过程中的平顺性和汽车乘坐的舒适度。因此总体来说,模糊控制主动悬架模型的设计是比较合理的。
5、结束语
本文以1/4车二自由度的汽车悬架简化模型为例,根据路面等级分布表以及我国路况的分布范围,选取C等级路面作为参考依据进行输入信号的设计,且将模糊控制应用于汽车悬架上,搭建模糊控制主动悬架和被动悬架两种悬架模型进行比对,最终通过在MATLAB/Simulink中进行仿真实验从而验证了模糊控制主动悬架的优越性,并且从本次仿真可以看出,采用模糊控制可以很好的抑制车身垂直加速度的变化,改善汽车行驶的平顺性和乘客乘坐的舒适度,从而更好地解决汽车乘坐的舒适度与驾车的安全性的问题。
参考文献
[1]陈学文.1/2 汽车主动悬架模糊控制器设计及Simulink 仿真研究[J].辽宁工业大学学报(自然科学版),2016,36(2):117-121.
[2]马娇.基于 MATLAB 的汽车主动悬架模糊控制系统仿真[J].工程管理与技术,2018,21:194-196
[3]吴慧峰.基于模糊控制的汽车主动悬架系统仿真研究[J].计算机仿真,2012,29(3):363-366
[4]马克. 汽车主动悬架的模糊控制策略研究[D].重庆理工大学,2018.
[5]马强杰.半车主动悬架系统模糊控制器设计[D].镇江:江苏大学,2019.