高遮挡环境下玉米植保机器人作物行间导航研究
2020-10-29潘艳娟陈志健王玉伟李亚伟陈黎卿
刘 路 潘艳娟 陈志健 王玉伟 李亚伟 陈黎卿
(1.安徽农业大学工学院, 合肥 230036; 2.安徽省智能农机装备工程实验室, 合肥 230036)
0 引言
玉米作为我国主粮作物之一,后期植保是一项重要环节。在玉米植株生长中后期,植株形态复杂,枝叶的相互交错对可通行区域的遮挡严重,影响了植保机器人作物行间自主导航行驶的通过性[1-3]。因此,玉米作物中后期植保机器人导航方法被广泛研究[4]。
目前复杂环境农作物的三维信息获取主要有立体相机、深度相机和激光雷达3种方式。其中,立体相机和深度相机能够快速、准确、高效地获取作物表征信息,然而在室外光照强烈的环境中存在相机过曝导致感知的信息缺失[5-9]。激光雷达根据回波检测原理可以获得精准的作物点云数据,可以直观地观测出物体形状和结构特征[10-17]。张漫等[18]结合激光雷达传感器对玉米植株三维点云表面特征进行二次滤波处理,通过点云滤波去除植株表面的无效噪点,优化了三维玉米植株点云的识别和植株特征提取。ZHANG等[19]通过多传感器融合的方式,将二维雷达与三维雷达相结合,进行目标障碍物的识别和小型植保机器人行驶路径的规划。薛金林等[20]利用激光雷达在无行距果树树林中进行导航性能测试,基于激光雷达获得的树行信息,结合模糊控制算法进行导航路径计算。三维激光雷达受光照的影响小,可以提供作物的三维表征信息,使复杂高遮挡环境可通行区域识别具有可行性[21-24]。
本文将一种植保机器人顶端搭载的16线激光雷达[25-26]作为感知单元,并通过点云滤波聚类实现玉米主干区域识别并提取机器人可通行区域,最终拟合导航线。在激光雷达获取玉米植株表型三维点云数据基础上,研究叶片与主干点云地面投影的分布规律及K-means聚类特性,通过置信区间对聚类获得中心点进行分析,剔除玉米作物行中心分析的离群点,优化所识别的主干区域,最终实现高遮挡环境下可通行区域的识别。
1 识别系统组成与点云样本
1.1 系统组成
移动机器人由三轮驱动机器人底盘、VLP-16激光雷达、工控机组成,其采集系统硬件平台如图1所示。植保机器人感知系统配置4GB独立显卡、16GB内存、core i7处理器的工控机,使用VLP-16激光雷达搭载移动机器人作为传感器。

图1 植保机器人平台实物图Fig.1 Crop protection vehicle platform1.三维激光雷达传感器 2.前轮转向电机 3.GNSS导航模块 4.锂电池 5.底层控制处理器 6.工控机
大田环境中,机器人全局定位采用GNSS导航系统,局部环境感知主要采用3D激光雷达。机械化玉米种植每隔固定距离预留植保机器人进出约80 cm操作行,机器人设计宽度为60 cm。GNSS导航系统根据操作行分布,规划机器人完整田块植保作业行驶路径,由于GNSS导航系统无法感知实际玉米植株位置,并且玉米冠层对于GNSS信号遮挡严重,差分信息稳定性差,因此玉米垄间导航主要使用3D激光雷达感知机器人局部环境信息,实现植株局部防碰撞下的导航行驶。
VLP-16激光雷达有效测量距离100 m,垂直视场角度为±15°,当激光束遇到障碍物时,反馈距离与坐标信号等信息,激光雷达工作原理示意图如图2所示。机器人近端被测玉米植株高度方向信息有丢失,远端玉米植株虽然高度方向所获得信息增加,但由于被近端玉米叶片遮挡同样会造成植株形态信息的残缺,给感知定位增加了难度。

图2 雷达工作原理示意图Fig.2 Schematic of LiDAR working principle1.三维激光雷达 2.移动机器人平台 3.地面 4.玉米植株
1.2 点云样本及数据分析
玉米植株主干部分点云分布集中,而四周分布比较零散,覆盖范围较大,如图3所示。由于玉米植株枝叶点云交织,中间可通行区域遮挡严重,可通行操作行中感知到大量点云信息,较难直接获取空白可通行区域。机器人行驶过程中,由于植株叶片在垄间属于非刚性障碍,碰撞并不会造成玉米植株损坏,可以通过分析玉米主干区域位置来限定机器人行驶边界,解决植保机器人可通行区域的遮挡问题。

图3 数据信息采集Fig.3 Data acquisition
2 玉米识别和聚类
2.1 玉米点云预处理

图4 玉米植株点云投影图Fig.4 Point cloud projection of maize plants
如图3b所示,激光雷达所采集的点云中地面、杂草等无关点较多。针对植保机器人导航路径需求,仅提取行驶前进方向两侧植株所在区域点云信息,本文提取的点云为传感器所在垂直面与前方4.5 m范围内点云。首先,根据点云下采样算法不改变点云分布特性,使用体素化网格方法实现下采样降低点云密度,减少了数据计算量,达到精简点云目的;再利用随机采样一致性(RANSAC)算法将地面与非地面点云进行分割,减少玉米植株聚类的干扰因素。最后基于直通滤波算法对某一维度进行筛选过滤,实现空间上分割以提取玉米植株点云区域,结果如图4a所示。通过预处理,玉米点云数据较好地提取出玉米作物行玉米点云信息,为玉米作物行中心区域识别提供了基础。
2.2 K-means算法提取主干区域
实际玉米植株之间存在叶片交叉,清晰分辨出每一株玉米主干的位置较为困难。向地面投影激光雷达扫描玉米植株获得的点云,统计投影面上点数量。如图4b所示,靠近激光雷达处主干区域垂直方向点更加密集,然而叶片重叠处点云也十分密集;前进方向越远处点云信息越稀疏,主干区域点云密度也逐步下降。因此,根据每株植株点云地面投影云团具有主干区域密集、叶片区域稀疏特点,通过垂直投影后点云聚类分类植株点云团,并确定聚类中心。
通过K-means算法对玉米植株进行垂直投影后中心主干聚类。点云集合S中任意点与邻近点之间的欧氏距离为
(1)
式中xi、yi——点坐标值
空间点欧氏距离越小,两个数据相似度越高。对玉米植株所产生的点云数量的估计设置k值。对每个样本点计算到这k个中心点的距离,将样本点归到与之距离最小的那个中心点的簇。
(2)
式中h——激光雷达基准线离地高度
lp——估算的玉米株间距
经过聚类之后k个聚类的中心点为
(3)
算法的聚类准则为
(4)
2.3 聚类误差分析

图5 玉米识别与聚类Fig.5 Corn identification and clustering
由于VLP-16型线激光雷达采集点云密度大,且玉米植株枝叶分布较茂盛,在枝叶遮挡严重或在目标没有特征的环境下,存在近端枝叶数据点密度大于远端枝干数据点密度,导致近端聚类中心点分布密度大。如图5b所示,提取玉米主干的过程中出现错误的聚类点,左行第1株玉米点云上出现多个聚类中心点,使通过聚类中心点拟合得到的行线与图5实际植株行线相比存在较大误差。
为提高分析精确度,根据玉米作物成行种植特性引入置信区间,去除所估计玉米主干区域离群的聚类点,以远端主干区域点为参考,去除近端枝叶错误聚类所得聚类中心点,减少远离实际行线的枝叶中心聚类点对行线拟合的影响。具体如下:
将每个点到由聚类点拟合直线y=ax+b的距离Li(a,b)作为样本,且符合L~N(μ,σ2)。所有聚类点到直线的距离均值为
(5)
式中Li——聚类点到直线的距离
聚类点到拟合直线的距离样本方差为

(6)
(7)
式中α——显著性水平
联立式(6)、(7)计算可以得到聚类中心区域点范围为
根据置信上下限对聚类中心点进行区间划分,在区间外的聚类点记为离群点。以图5中左排玉米为例,根据实际需求取置信度为95%。如图6a所示,虚线外侧圆圈点不在置信区间内,将其去除。

图6 K-means聚类主干点基于正态分布的置信区间Fig.6 Confidence interval of K-means cluster main points based on normal distribution
2.4 导航线规划方法
机器人在已知玉米局部中心区域基础上规划导航线,主要使规划路径尽可能避开玉米主干。本文使用RBF路径规划方法[7]。作物在作物行外的场景如图7所示,对比Hough中心线提取和RBF情况下计算出来的路径轨迹。中心线提取的方法虽然导航线在出现秸秆超出作物行时向左偏移,但是由于车身宽度的原因,车辆与超出秸秆发生碰撞的概率很大。而使用RBF的方法,在此处有航向角的偏转,使得移动植保机器人顺利通过的几率明显增加。

图7 Hough中心线提取和RBF路径规划Fig.7 Hough centerline extraction and RBF path planning
3 试验
通过置信区间优化K-means聚类主干点方法,在实际农田作物行中有效识别出植保机器人可通行区域,为更精确分析该方法在多种玉米种植密度下的植保机器人可通行区域识别精度,本试验通过布置标定好行距和株距的玉米植株,模拟真实场景开展精度分析试验。经过调研,安徽地区机械化种植玉米作物的大田每隔5 m或10 m预留70~80 cm作业行,种植玉米株间距20~30 cm,布置模拟试验如图8所示,调节行间距与株间距研究不同行间距与株间距对该方法识别精度的影响。为更好实现模拟场景真实性,试验中调整传感器感知高度,使其所采集点云形态与真实环境保持一致,所采集对比点云如图9所示。通过对比基于K-means聚类获取的玉米主干定位与模拟植株真实位置,分析玉米主干定位误差。

图8 模拟试验Fig.8 Simulation experiment
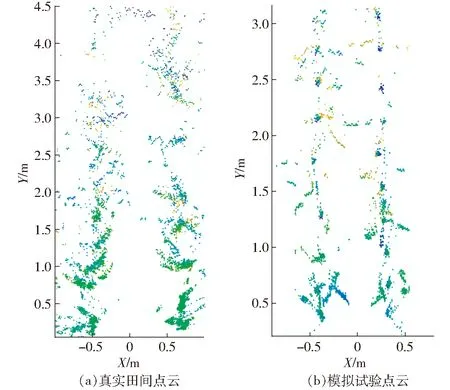
图9 真实环境与模拟试验点云对比Fig.9 Comparison of real environment and test point cloud
模拟试验场景下植株聚类方法定位位置与真实位置对比如图10所示,当被测植株距离雷达越远时,测量的玉米主干误差有所增加。根据两侧所求得主干中心区域,并通过中心区域圈定可通信区域规划获得导航线。通过对比,行距70~80 cm宽度内变化对中心区域识别误差影响较小,试验中导航线最大误差7.67 cm,最小误差0.6 cm,平均误差4.1 cm。

图10 玉米分布结果对比Fig.10 Comparison of corn distribution
根据上述试验方法,调整玉米行间距与株距,控制植保机器人在垄间多次行驶采集数据,分析植保机器人在作物行中不同位置的玉米植株主干区域定位与真实位置误差。如图11所示,选取试验中典型的4个位置误差数据。如表1所示,近端玉米定位与路径规划误差小,距离越远误差越大。
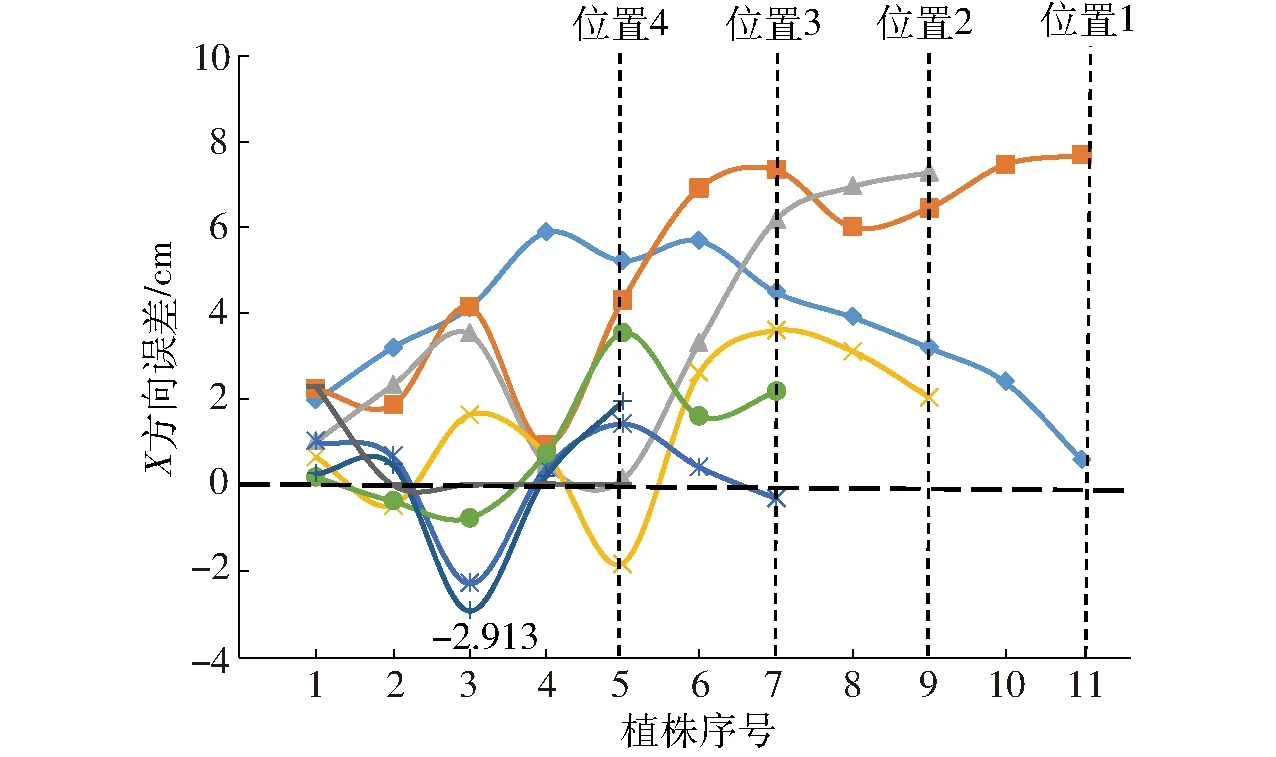
图11 误差变化曲线Fig.11 Error analysis curves

表1 玉米行间误差分布Tab.1 Inter row error distribution of corn cm
多次试验结果表明,采用K-means算法引入置信度来估计玉米主干位置,与玉米主干实际可通行区域进行对比,X轴方向4.5 m前视范围内平均误差均保持在±5 cm以内,最大误差为7.67 cm。由于机器人宽度限制,移动平台行驶速度与前视距离成正比、与感知规划时间成反比。感知系统3~3.5 m前视距离最大误差3.55 cm,当前系统感知响应平均用时2 s,满足机器人设计的最大移动1 m/s速度需求。误差来源主要由于叶片分布不规则,且玉米叶片面积较大激光雷达感知点较密集,导致聚类中心受叶片伸展影响较大。作物行间玉米叶片重叠会影响两侧植株信息完整性,同样给玉米主干区域分析带来干扰。除此之外,车载激光雷达振动和倾斜会造成整体点云的偏移,也会导致主干区域整体偏移。
4 结论
(1)在K-means算法基础上引入置信区间优化主干区域聚类结果,通过分析机器人前进方向上的玉米植株三维点云数据,研究叶片与主干点云地面投影的分布规律,设置置信区间获取K-means聚类中心点,剔除玉米垄间的离群点,基于此方法提出一种高遮挡环境下玉米中后期垄间行走小型植保机器人可通行区域识别方法。
(2)近端玉米定位与路径规划误差小,距离越远误差越大。植保机器人的设计宽度为60 cm,通过试验,感知系统3~3.5 m前视距离最大误差3.55 cm,当前系统感知响应平均用时2 s,满足机器人设计的最大移动1 m/s速度需求。该误差基本能使移动机器人保持在80 cm左右宽度作物行内正常行驶。
(3)该方法误差来源较多,主要由于叶片分布不规则,且玉米叶片面积较大,激光雷达感知点较密集,以及作物行间玉米叶片重叠会影响两侧植株信息完整性,导致聚类中心受叶片伸展影响较大。此外,车载激光雷达振动和倾斜会造成整体点云的偏移,也会导致主干区域整体偏移。
