飞机无杆牵引车多工况牵引的平顺性仿真及优化
2020-10-21解本铭朱俊伟
解本铭,朱俊伟,王 伟,张 威,2
(1.中国民航大学航空工程学院,天津300300;2.中国民航航空地面特种设备研究基地,天津300300)
1 引言
无杆牵引车是机场进行推拖飞机的特种车辆[1]。与传统有杆牵引车相比,无杆牵引车取消了牵引杆,因此其体积更紧凑,质量更轻,效率更高。无杆飞机牵引车由于其工作特点-夹持举升飞机的前起落架,借助飞机的部分质量来增加与地面的附着力,并通过对飞机进行顶推和牵引作业,实现飞机在关闭发动机的状态下机场内的移动[2]。车辆的平顺性是指在地面不平度输入下,车辆系统振动所造成驾驶员或乘客舒适性的感觉[3]。无杆牵引车的行驶平顺性不仅影响驾驶员的舒适感觉,也影响飞机前起落架能否安全可靠的工作。随着民航业的迅速发展,无杆牵引车在机场上的运用越来越普遍,无杆飞机牵引车相对有杆牵引车的优点使其在机场应用方面备受关注,飞机无杆牵引车的驾驶员面临工作负荷大,需要长时间的操作车辆,无杆牵引车在机场路面不平的激励下,牵引车会产生一定的颠簸,会使驾驶者感到不舒适,剧烈的振动会加速轮胎的磨损,无杆牵引车的夹持举升机构在冲击载荷的作用下会严重缩短工作寿命,在极限的情况可能会导致前起落架折断事故的产生,危及驾驶员的生命安全。因此研究飞机无杆牵引车工作时的平顺性,对降低牵引车部件及轮胎的磨损,保障机场的安全运行,以及对飞机无杆牵引车的设计及应用具有一定的指导意义。所以对无杆牵引车的平顺性的研究不仅影响行驶的舒适性,也影响民航运输的安全性。
目前,对飞机牵引车的研究主要围绕机构的设计及其性能的分析[4]。文献[5]研究了有杆牵引车通过凹坑路面时牵引载荷的变化;文献[6]研究了再转向角阶跃输入下无杆牵引车的操纵稳定性,为顶推方式下牵引车-飞机系统的操纵稳定下提供了参考;文献[7]进行无杆牵引车在B 级路面的平顺性仿真分析。其研究考虑了一种特定速度下的牵引工况,未考虑飞机前、主起落架的减震特性。
通过建立无杆牵引车-飞机系统的虚拟样机,进行在随机输入和脉冲输入下、多工况牵引作业的仿真分析,分析了路面不平度等级、速度等因素对牵引工作平顺性的影响。并对影响无杆牵引车平顺性的主要因素进行优化,以最大垂向加速度为指标验证优化后的优越性,为提高飞机-无杆牵引车系统的行驶平顺性和保障民航安全运输提供一定的参考意义。
2 模型的建立
飞机-无杆牵引车系统属于典型的多体动力学系统,要求解出系统的振动特性需要对模型进行简化:(1)牵引车整车可分为转向系统、悬架系统、前后轮胎及车身系统;(2)除减震弹簧、阻尼器和橡胶元件外,其他结构都视为刚体;(3)忽略除地面不平输入外的其他输入;(4)主要考虑飞机-无杆牵引车系统的垂向振动,忽略系统的侧倾运动。
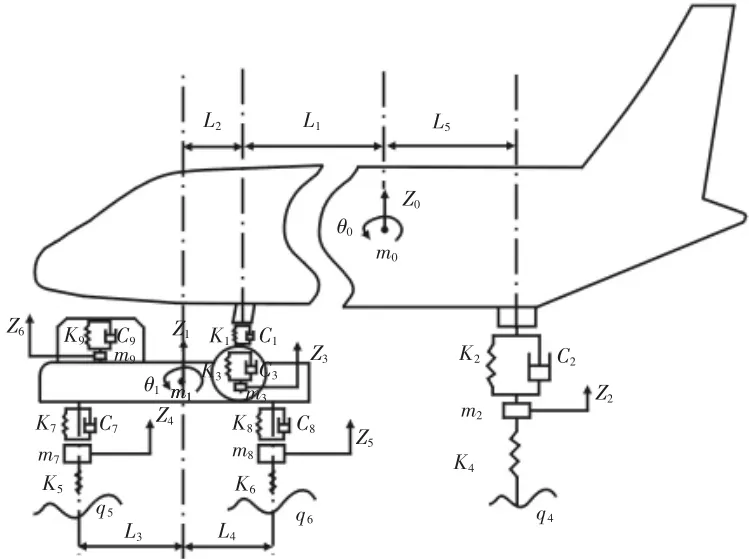
图1 飞机-无杆牵引车振动力学模型Fig.1 Vibration Mechanics Model of Rodless Tractor
建立图1 的9 自由度振动动力学模型,广义坐标Z=[Z0,Z1,Z2,Z3,Z4,Z5,Z6,θ0,θ1]T,其中道面激励为Q=[q1,q2,q3]T,m0与m1分别为飞机和牵引车的质量,mi(i=3,4,5,6)为飞机、牵引车前后轮的质量,l1和l5分别为飞机重心位置到前起落架和主起落架的距离,l3和l4分别为牵引车重心位置到前轮和后轮的距离,l2为牵引车重心到前起落架的距离,Ki与Ci(i=1,2)为飞机前、主起落架刚度和阻尼,Ki与Ci(i=3,4,5,6)为飞机、牵引车前后轮的刚度和阻尼,Ki与Ci(i=7,8)牵引车前后悬架刚度和阻尼,m9、K9、C9为座椅质量和座椅处的刚度和阻尼,应用拉格朗日法建立振动微分方程:
利用Adams 软件建立飞机-无杆牵引车虚拟样机[8],对系统中无相对运动的部件和相对运动影响较小的部件进行固化组合。并将Solidworks 建立的三维模型导入Adams 软件后进行简化,并输入各部件的质量、转动惯量等数据,无杆牵引车和飞机的相关参数,如表1 所示[4,9]。
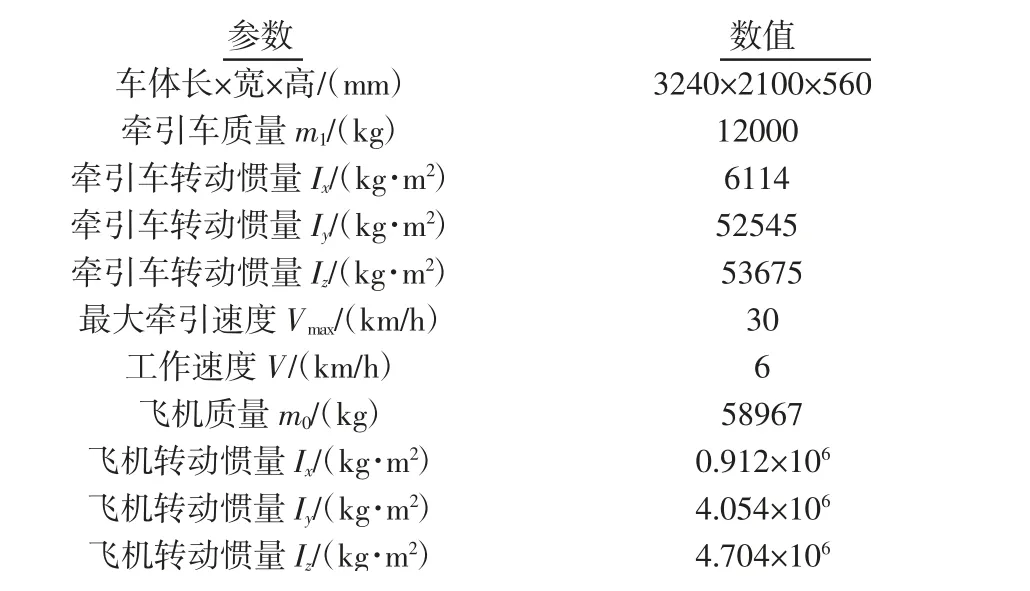
表1 牵引车和飞机的主要技术参数Tab.1 Main Technical Parameters of Tractors and Aircrafts
飞机起落架是飞机在地面停放、滑行、起降滑跑时用于支撑飞机重量、吸收撞击能量的飞机部件,因此在考虑飞机无杆牵引车牵引作业时需要考虑起落架缓冲支柱的影响[5]。仿真针对波音737-800 机型的牵引过程,飞机的建模可简化为机身、前后起落架及起落架缓冲支柱、轮胎。除飞机轮胎和起落架缓冲支柱外,其他结构视为刚体[10]。飞机起落架减震器空气弹簧力和油液阻尼力曲线可由文献得到[11-12],通过Adams 函数AKISPL 将起落架减震器中空气弹簧力与压缩行程的关系和油液阻尼力与活塞相对速度的关系特性分别赋予在前、主起落架上,如图2 所示。

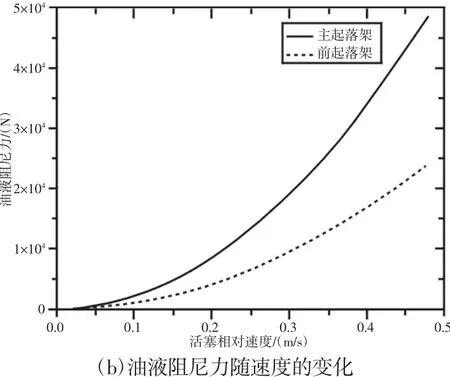
图2 飞机起落架减震器缓冲支柱特性Fig.2 Aircraft Landing Gear Shock Absorber Characteristics
轮胎模型是飞机-牵引车系统的重要组成部分,轮胎理论模型采用Fiala 模型,适用于三维不平路面的仿真[8]。
为了更好的模拟牵引车推拖飞机的真实情况,研究牵引车在不平道面激励下的振动反应,因此需要获得道面的不平度。机场道面不平度等级常用世界银行划分标准-国际平整度IRI 来表示,根据世界银行的划分标准,机场跑道的IRI 范围在(0.25~1.75)内。道面不平度功率谱密度PSD 与空间功率谱密度Ge、速度功率谱密度Gs及加速度功率谱密度之间的关系如下[13]:
式中:a0—常数,a0=103m-1.5。
机场道面一般都比较平整,故选取平准度标准为好、中等路面进行仿真,以此来仿真在机场道面和非机场道面的情况。功率谱密度与平整度IRI 的关系,如表2 所示。在Adams 建立表2 参数的两种道面,定义各部件之间的约束关系,所建立的飞机-牵引车系统虚拟样机简化模型,如图3 所示。

表2 两种常见的道面参数Tab.2 Two Common Pavement Parameters

图3 无杆牵引车-飞机系统虚拟样机模型Fig.3 Virtual Prototype Model of the Rodless Tractor-Aircraft System
3 飞机-牵引车行驶平顺性仿真分析
3.1 评价方法
根据GB/T 4970-2009《汽车平顺性试验方法》及ISO2631-1:1997(E)的评价标准,利用加权加速度均方根值aw来评价平顺性,可通过下式来求加权加速度均方根值aw。

式中:Ga(f)—功率谱密度函数;w(f)—频率加权系数。
对各轴向加权加速度均方根值进行加权求和,得到总加权加速度均方根值aw。

3.2 随机输入平顺性试验
根据GB/T4970-2009 平顺性试验的要求,无杆牵引车分别在IRI=1.26、IRI=2.54 的路面下牵引飞机,在牵引车速为6km/h下对飞机-无杆牵引车系统进行仿真,经时域分析后得到牵引车质心的横向、纵向、垂向的加速度,如图4 所示。

图4 两种随机输入下各轴向加速度时域仿真对比Fig.4 Comparison of Each Axial Acceleration Under Two Random Inputs in Time Domain Simulation
从图4 可以看出当飞机-牵引车系统在IRI=2.54 道面其各轴向的振动加速度明显增加。对加速度曲线进行频域变换后求得功率谱密度,根据平顺性评价方法求得在IRI=1.26 和IRI=2.54情况下的总加权加速度均方根值aw,如表3 所示。通过仿真分析表明,在平整度好的机场路面牵引车推拖工作时,驾驶员无不舒适的感觉。在中平整度水泥路面,驾驶员会觉得很不舒适,在平整度较好的路面平顺性较好。

表3 两种随机输入下的平顺性评价Tab.3 Evaluation of Ride Comfort Under Two Random Inputs
3.3 不同车速时随机输入下的平顺仿真分析
车速是影响车辆行驶垂向加速度的一个重要因素,因此对牵引车行驶平顺性分析必须考虑牵引速度的影响。
机场的道面平整度相对较好,且垂向加速度是影响总加权加速度均方根的主要因素。因此选择道面等级IRI=1.26 的路面输入,且在不同的牵引速度下,牵引车座椅处的垂向加速度均方根值随速度变化的关系,如图5 所示。
由图5 可以看出,随着牵引速度增加,垂向加速度均方根值整体呈变大状态,在18km/h 速度附近的中速状态呈现相对较低的加速度均方根值,有较好平顺性。因此为了牵引车有较好的舒适性和经济性,选择中速状态进行牵引。并且这也符合实际重型车辆的速度特性。

图5 垂向加速度均方根值随速度的变化关系Fig.5 RMS of Vertical Acceleration Against Speed
3.4 脉冲输入平顺性仿真
根据GB/T4970-2009《汽车平顺性试验方法》对虚拟样机进行脉冲输入平顺性分析[14]。飞机-牵引车虚拟样机在经过凸起的路面时,相当于路面对虚拟样机进行了脉冲输入。飞机-牵引车在路面凸起的输入下,势必会影响牵引车行驶的平顺性,因此有必要研究无杆牵引车在路面凸起的情况下推拖飞机时的行驶平顺性。飞机-牵引车系统牵引速度为6km/h 时通过凸起路面时各轴向加速度,如图6 所示。
图6 脉冲输入下各轴向振动加速度Fig.6 Acceleration of Each Axial Vibration Under Pulse Input
无杆牵引车在前轮和后轮在通过凸起路面时,相当于两次脉冲输入,因此各轴向加速度会出现两次波峰。在各轴向加速度中,横向和纵向加速度较小,垂向振动加速度对平顺性影响较大,进一步验证了垂向加速度是影响平顺性的主要因素之一。考虑在不同牵引速度下通过凸起路面,垂向加速度响应,如图7所示。
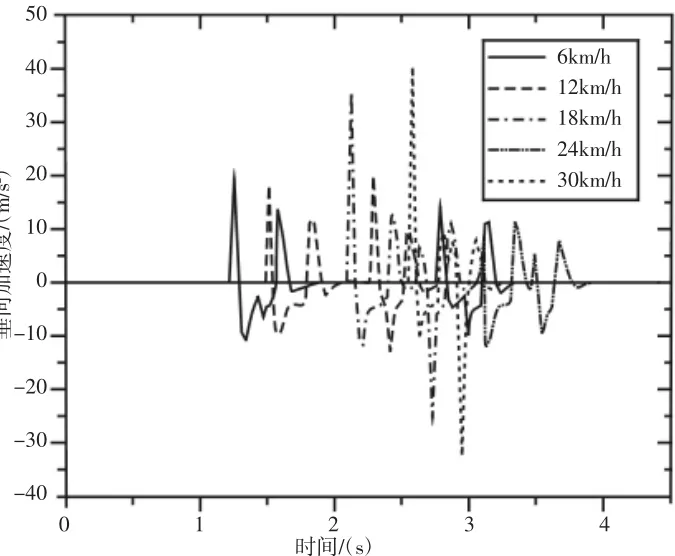
图7 不同牵引速度下牵引车的垂向振动加速度Fig.7 Vertical Acceleration of Tractor Seats at Different Traction Speeds
在不同车速下的垂向最大加速度,如图8 所示。根据图8 可知,在车速为30km/h 时垂向加速度较大,对飞机-牵引车系统平稳性及安全影响较大,牵引速度过低时又会影响机场运行效率。车速在10km/h 左右经过路面凸起时垂向最大加速度相对较小,因此在推拖飞机时,驾驶员驾驶牵引车速度既不能过快也不能过慢。因此保持中速行驶既可以提高机场运行效率,也可较大的提升平顺性,减缓前起落架振动磨损。
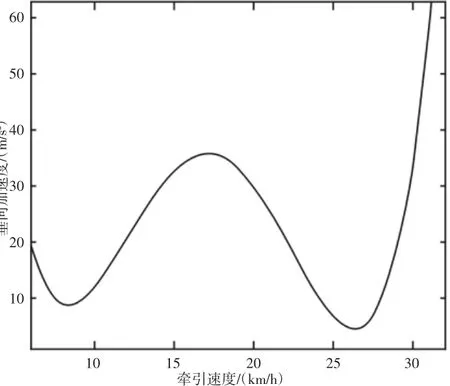
图8 不同牵引速度通过凸块路面的垂向加速度Fig.8 Vertical Acceleration of Different Traction Speeds Through Convex Road
4 平顺性优化
大型无杆飞机牵引车悬架刚度和阻尼是影响车辆平顺性主要因素,因此以垂向加速度为优化目标,对牵引车在平整度好的道面对悬架刚度和阻尼进行优化分析,其数学模型为:
式中:ay—牵引车车身的垂向加速度;K7、K8、C7、C8—牵引车前后悬架的刚度和阻尼;V—牵引车牵引速度。
按照上式的优化算法,优化变量为K7、K8、C7、C8、V,运用Adams 进行平顺性优化仿真,优化后的垂向加速度对比,如图9所示。
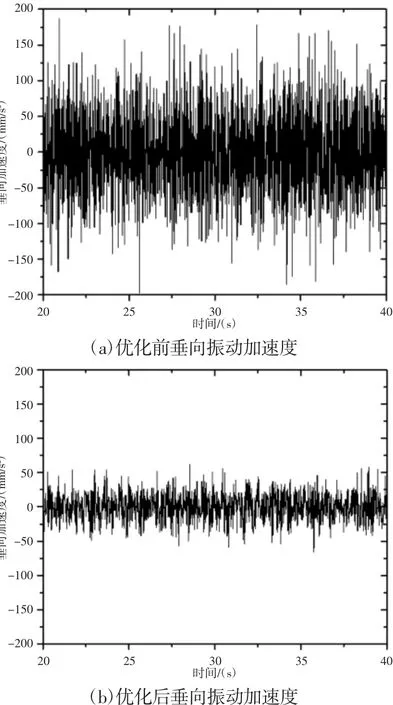
图9 优化前后垂向振动加速度对比Fig.9 Comparison of Vertical Vibration Acceleration Before and After Optimization
优化前后的速度、刚度及阻尼,如表4 所示。由上表4 可知,选择合适的行驶速度,悬架刚度及阻尼可以有效的减少垂向加速度,提高行驶的平顺性,加速度均方根值由最开始的1.26m/s2降低到0.19m/s2,说明适当的降低刚度和阻尼,可以有效的提高无杆牵引车的平顺性。

表4 优化前后参数对比Tab.4 Comparison of Parameters Before and After Optimization
5 结论
(1)建立了飞机-无杆牵引车虚拟样机模型,并在多种工况下进行平顺性仿真。通过在道面不平度输入及在脉冲输入下进行仿真试验,可以得出提高路面等级,并选择合适的牵引速度,可以有效的提高牵引工作的平顺性。(2)分析车速,牵引车悬架刚度阻尼因素对平顺性的影响,通过优化车速及悬架的刚度和阻尼,可以得出无杆牵引车的垂向加速度和加速度均方根值明显降低,可有效的减少前起落架缓冲支柱的冲击振动,减少前起落架的磨损。