地下矿山双机牵引无人驾驶电机车运输系统的应用实践
2020-10-20
铜陵有色金属集团有限公司冬瓜山铜矿 安徽铜陵 244031
无人视驾频驶监电控机系车统运为输辅系助统,是采以用通列信控网技络术为、平信台集,闭技术、视频和图像处理技术的一项综合性技术[1]。实现井下电机车的远程无人驾驶,不仅可以改善工人的劳动环境,减少运输环节作业人员,提高运输效率,还可为安全生产提供保障,同时为实现智能化矿山打下良好的基础。2011 年,铜陵有色冬瓜山铜矿与中国恩菲工程技术有限公司开展了《地下矿无人驾驶电机车运输》的课题研究工作,进行了井下无人驾驶电机车运输系统技术试验、应用和优化,经过多年的研究试验,形成了前后电机车双机牵引、前后机车无线通信、装载站远程遥控和信集闭机车调度等多功能于一体的双机牵引无人驾驶电机车运输系统。
1 双机牵引无人驾驶电机车运输系统组成
运输系统框图如图1所示。2019 年 9 月,该双机牵引无人驾驶电机车运输控制系统在铜陵有色冬瓜山铜矿 -1 000 m 运输中段投入生产试运行,达到设计运输能力。运输牵引设备为变频电机车,前后双机牵引,每列编组由 12 辆 10 m3底侧卸式矿车组成,编组总长 80 m,溜井下设置XZG3000*1800 型悬吊式振动给矿机。该系统由无人驾驶电机车及控制系统、巷道有线和无线通信系统、装载站控制系统、转辙机控制系统、视频监控系统、牵引变电所和滑触线供电监控设备等组成,同时兼顾今后智能化矿山建设需求,为地下无人驾驶电机车运输系统关键技术的研究应用积累了一些经验和思考。
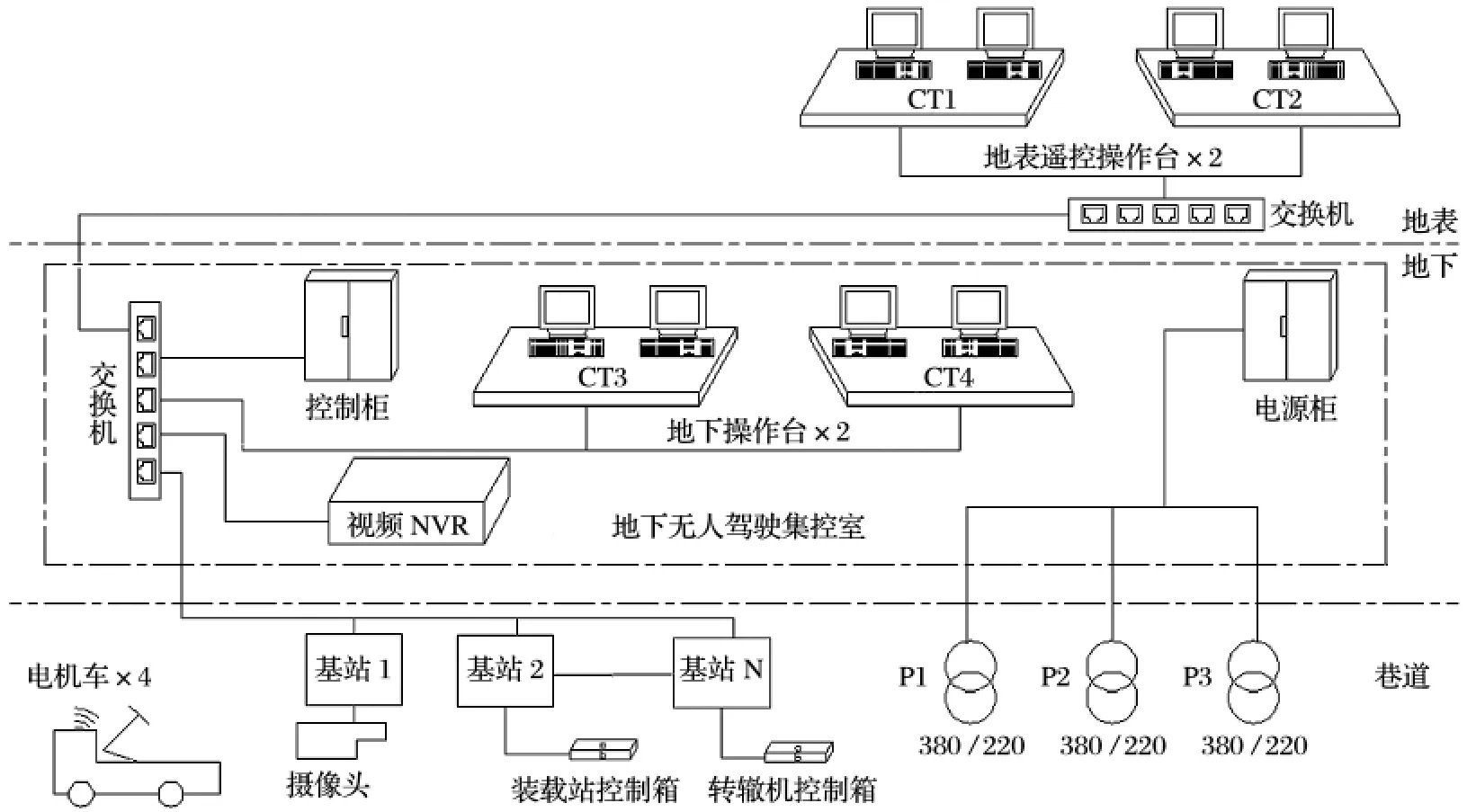
图1 无人驾驶电机车运输系统框图Fig.1 Block diagram of driverless electric locomotive transportation system
2 无人驾驶的运行条件
(1) 矿山放矿溜井不能含有较多的水、泥矿和大粒度矿块,因为这些可能造成放矿时矿石流量难以控制,而发生跑矿和漏井卡塞现象。
(2) 无人运输作业区域应相对封闭,便于管理,避免无关车辆和人员随意进入作业区域。
(3) 运输轨道和滑触线敷设需规范,列车运行需平稳。
3 电机车牵引方式的选择
目前国内外无人驾驶电机车牵引方式有单机车牵引方式和双机车牵引 2 种。单机车牵引装卸载方式又包括有动力源卸载站和无动力源卸载站。单机牵引因在装载和卸载时无动力源只能依靠机车本身惯性运行,此时电机车为失控状态;而有些矿山采用有动力源卸载站或在装卸载时采用机车侧向位受电等方式,但其投资较大,维护困难,安全管理难度大。因此,冬瓜山铜矿摒弃单机牵引方式,采用前后双机牵引方式。
4 电机车调速形式选择
地下轨道运输以电机车作为牵引设备,调速形式包括电阻调速、斩波调速和变频调速。变频调速是一项成熟技术,已经在工业生产各个领域得到广泛应用。而无人驾驶电机车因没有司机随车操作,不能根据实际生产和环境条件的变化实时调整电机车的运行状态,特别是在电机车减速和停车阶段,因此精确可靠的控制是保证电机车运行安全的前提。在目前电机车驱动方式中,变频调速启动性能好、调速稳定、制动安全可靠,相对更能满足此要求[2],故选择变频驱动方案用于无人驾驶系统较为合适。
5 无人驾驶运输系统关键技术
无人驾驶运输系统主要包括电机车控制系统、通信系统、装载站控制系统、视频监控系统以及转辙机、门禁等辅助控制系统。
5.1 电机车控制系统
无人驾驶电机车控制系统是无人运输系统的“大脑”,保证指令的及时传递和准确执行,其直接影响列车的运行和安全。无人驾驶电机车控制应具备 3 种控制方式[1]:
(1) 远程遥控方式 电机车按指令自动运行或操作员在集控室对编组进行远程实时控制。
(2) 人工控制方式 由电机车司机随车操作发出控制指令,控制整列编组。前、后车通过无线通信实现同步运行,用于生产前检查运输线路、生产区域状况和设备运行状态。
(3) 检修控制方式 2 台机车可独立运行,前后电机车无相互控制关系,用于设备检修、故障车辆入库和编组的调配。
5.1.1 电机车须具备的主要控制功能
无人驾驶运输因无人随车操控,操作人员在地表或井口集控室远程遥控完成矿石运输作业。如果电机车运行完全依靠人工远程遥控,不仅增加了操作人员的劳动强度,降低了作业效率,更无法确保电机车运输作业过程的安全性。因此电机车必须具备智能控制系统并按指令要求自动运行,这样不仅可以减轻操作人员的劳动强度,更使得无人运输电机车更加安全、高效[1]。电机车控制必须具备以下主要功能。
美日药物临床试验中重大利益冲突的界定和管理探讨及对我国的启示 …………………………………… 苏 娴等(17):2333
(1) 自动运行 电机车接收到集控室指令后,按照设定的程序自动运行,在直道、弯道、道岔和装卸载时自动调整到合理的行驶速度。采用新研发的抗振、防潮的高精度位移传感器,精确测量电机车的行驶距离和实时速度。通过对电机车位移的精确测量,并配合设定的定点位置检测装置实现对电机车定点和区段的速度、加速、减速、集电弓升降、鸣笛的可靠控制。井下多编组运行时,电机车可根据整体运输线路情况自动调整运行参数,避免与前方机车碰撞,同时自动选择安全进出穿脉的时机,提高运输能力。
(2) 电机车同步控制 一列编组通过在前后 2台电机车的无线通信设备实现双机联动,替代传统的同轴电缆。电机车控制系统以前车为控制中心,对整个编组发出控制指令,实现前后电机车同步前进、后退、调速、制动及驻车等功能。电机车运行时,通过优化软件实现前车和后车输出功率自动调整,使前后电机车输出功率基本相同[1],加大了编组的整体牵引力,提高了编组的安全性能和运输能力。
(3) 电机车与集控室通信功能 电机车控制系统设有 2 条冗余配置的无线通信系统,确保电机车、巷道和集控室间的无线通信。通过 2 套通信系统自动无缝切换,实现集控室对电机车和相关设备运行的监控,实时将电机车和各设备状态发送到集控室。同时电机车上安装摄像机,实时监控电机车运行状态和运输线路状况,实现运输作业全过程监控,确保安全运行。
(4) 电机车事故处理 电机车出现故障时,及时向集控室报警并自动减速停车,集控室人员遥控编组退出运输线路,避免占道影响生产[1],保证运输系统的安全性和生产的连续性。
5.1.2 电机车须具备的主要保护功能
井下实际作业环境的高振动、高温、高湿及高粉尘等因素对电机车运输系统的安全可靠运行影响较大。无人驾驶电机车运输系统因无人随车操控,操作人员在地表或井口集控室远程遥控,一旦发生电机车失控或设备故障,对安全生产可能造成极大的影响,因此对无人驾驶电机车运输系统的自我诊断、故障反馈和安全保护尤为重要。电机车控制系统必须具备以下主要保护功能。
(1) 电机车通信失联保护 当编组失联超过 3 s,电机车应自动停止运行并采取停车措施,同时电机车控制系统中具备运行记忆功能,编组运行时又有一定的安全间距,避免了编组间发生碰撞事故。
(2) 电机车位置保护功能 为保证无人驾驶电机车安全可靠地运行,运输线路的道岔、装矿点、卸矿站等处配置定点位置检测装置。电机车每次运行都应与指定的定点位置进行同步,以消除电机车运行中的累积误差,保证编组位置的准确性,确保电机车与位置有关的控制功能的可靠执行。特别是当电机车接近特定位置时 (如主、副井口),通过定点位置检测装置发出接近位置极限信号,电机车立即实施制动,避免机车坠井事故的发生。
(3) 防碰撞保护 对于同一线路多编组运行电机车,通过信集闭预占道和电机车定位功能实时反馈,结合各编组运行速度、运行方向,列控系统可发出加减速或停车指令,防止发生追尾和碰撞事故。
(4) 电机车减速、制动、制动失效保护 检测电机车在减速、制动、停车状态下的速度和减速度,及时发现调速、制动失效,并采取紧急停车措施,确保机车的安全。特别是对于电机车驻车时出现的溜车情况,控制单元迅速诊断电机车移动状态,并实施紧急停车。
(5) 电机车脱轨保护功能 电机车脱轨是无人驾驶电机车运行中的严重事故,如果不能发现或者发现不及时,可能造成整个运输中段的生产停顿。通过检测电机车运行状态,控制系统对位置、速度等参数的分析,以及视频监控系统的监控,及时发现电机车脱轨,防止事故的扩大。
5.2 网络通信系统
网络通信系统是无人驾驶的“中枢神经”,需及时、有效、可靠地传递指令。其同样直接影响列车的运行和安全。
无人驾驶电机车运输系统有两路无线通信[1]。一路是前、后电机车通信,实现 2 台电机车的同步控制。采用 2 套互为冗余的无线通信系统,确保 2 台电机车控制数据传输可靠。另一路是巷道通信,巷道沿途布置通信网络基站,以通信基站为节点,通过有线或无线的形式将电机车、装载站、转辙机、分段开关等控制系统关联,实现数据采集和传输的闭环控制。为确保电机车、装载站、转辙机等与集控室之间的网络通信可靠,各子系统通过各子系统无线发射接收装置将运行数据实时传送到集控室[3],同时把集控室的指令发送给各设备。各设备与巷道干线通信网络配置两套互为冗余的通信系统,同时整个运输区域内实现无线通信信号全覆盖,避免出现通信死角[4]。冬瓜山铜矿采用无线工业以太网和总线通信互为冗余的通信形式。
对冬瓜山铜矿 -1 000 m 中段无线通信的实地测试表明,井下运矿编组的运行对无线通信影响非常明显。在机车运行的巷道,无线通信有效截面相比空巷道减小近以上,通信距离缩短为空巷道的巷道断面对通信距离影响也非常大。经实地测定 12 m2巷道断面,直线空巷道通信距离约为 150 m,弯道通信距离则更短。冬瓜山铜矿 -1 000 m 主运输巷道通信系统沿途直线巷道按间距 50 m 布置通信网络基站,弯道按间距 25 m 布置基站,每个基站采用独立隔离电源供电模式并配置 UPS 电源,减少断电事故。
5.3 视频监控系统
根据远程遥控装矿和电机车运行的安全、可靠、可视化、实时性的要求,采用高清数字摄像机采集图像,通过光端机和光缆实现图像信号的传输。摄像机布置在电机车前后端、装载站、卸载站、转辙机、牵引变电所及门禁处。考虑到生产的需要,对画面实时性要求较高,采用 1080P 网络高清摄像机,以满足现场对实时性和画质的要求。为保证数据传输的稳定性,采用光纤传输,配合网络高清光端机进行视频数据传输。视频监控系统应具备一段时间的录像回放功能。在集控室布置电视墙,用于实时显示电机车运行状态,装载站、卸载站和卸载坑料位,电机车位置、占用区段以及巷道模拟,并根据需求通过网络将信号传输到地表。
5.4 装载站控制系统
在无人驾驶运输环节中,影响装载站自动装矿的因素较多,如矿石块度、料位高度、溜井含水量以及含泥量等。矿石流量、放矿速度难以均衡稳定,要实现自动装矿,难度和投入成本较大。因此,冬瓜山铜矿采用集控室遥控电机车编组运行至合适的装矿位置,并利用视频监控系统人工远程遥控装矿。装矿站需具备以下 3 种控制方式。
(1) 远程遥控方式 用于设备正常运行,接受集控室远程遥控。
(2) 就地控制方式 用于设备就地操作,不接受远程控制。
(3) 检修控制方式 用于机械和电气设备检修。
这 3 种控制方式的优先权为:检修控制方式 > 就地控制方式 > 远程遥控方式。
集控室通过网络通信系统与各装载站的远程子站实现通信。操作人员通过各装载站的远程子站在集控室对装载站进行控制。
5.5 转辙机、门禁等辅助控制系统
(1) 转辙机控制系统 转辙机采用就地和远程两种控制方式。集控室发出指令,实现转辙机远程控制,完成运输线路的调度和各个编组运行线路的控制。转辙机采用分布式控制结构,在地下总线网络上挂接远程子站,完成对各个转辙机的控制和信号采集工作。转辙机采用电动驱动方式,通过动作节点反馈信号,提供给集控室控制系统。考虑到电机车的安全,当转辙机发生故障或反馈信号不准确而造成列车编组运行线路错误时,电机车自动诊断出运行线路错误,自动停止运行并发出报警。考虑到在发生设备故障和设备检修时,控制系统设有就地人工控制方式。
(2) 门禁系统 《金属非金属矿山安全规程》规定:14 t 以上大型电机车 (或双机) 牵引运输,列车制动距离不超过 80 m。因井下巷道实际环境所限,无关人员和车辆在 80 m 外难以被电机车上的摄像机及时发现。另人员走动没有规律,加上巷道狭窄,使得防撞人判断困难。同时电机车本身十分紧凑,加装防撞检测设备的位置也存在较大困难。因此设置安全门并结合视频监控构建门禁系统,禁止无关车辆和人员进入运输区域更为切合实际。同时也可结合“矿山六大系统”中的人员定位系统,以确保无人运输作业区域内没有无关人员进入。
6 现场应用
自 2019 年 9 月冬瓜山铜矿 -1 000 m 中段有轨运输无人驾驶系统投入生产以来,该系统能够适应现场高温、高湿、高粉尘、频繁振动的恶劣环境,各项运行指标均达到要求,最高运输能力达 1 万劳动定员减少 54.5%,有效运行时间和生产能力提升 20%以上,节能 10.5%,超过预期目标,极大提升了生产效率,减少了劳动定员和劳动强度。
7 结语
随着我国金属矿山从浅部开采逐步走向了深井开采,带来开采成本和安全风险的增加,工作环境的恶劣,在新的开采条件下,传统的设备和安全管理理念已不能适应当前安全生产需要,无人驾驶电机车运输遂成为新时代下机械化、自动化、智能化地下矿山发展的必然趋势。冬瓜山铜矿经过长期实践,总结出了无人驾驶电机车运输系统应具备的条件和注意事项,探究无人驾驶电机车运输系统在地下矿运输中的具体应用,为其他地下矿山采用无人驾驶电机车运输提供了参考。
