基于RTKLIB的精密单点定位研究
2020-10-12丁耀宗
丁耀宗

摘要:本文在VS2010平臺上利用RTKLIB软件对2个IGS站一周的观测数据进行了静态、动态PPP解算,将7天内各单天解对应历元的平均坐标作为该历元下的最终结果,并与IGS发布的周解坐标进行E、N、U三个方向的比较。实验表明利用RTKLIB进行静态PPP解算,在N、E、U 3个方向2 h能收敛至0.1 m,24 h N、E方向精度优于0.01m,U方向优于0.03 m。动态精密单点定位受测站上空卫星空间几何强度影响较大,N、E方向精度能达0.1 m,U方向0.3 m左右。
关键词:精密单点定位 RTKLIB 静态PPP 动态PPP
精密单点定位(Precise Point Positioning, PPP)利用IGS提供的精密轨道和精密钟差,在综合考虑各项误差精确改正的基础上,采用合理的参数估计策略,实现单台双频或多频GNSS接收机在全球范围内的精密绝对定位,集成了标准单点定位和相对定位技术的优点 。由日本东京海洋大学高须知二开发的RTKLIB,其功能丰富,代码公开,是目前使用最广泛的PPP开源软件之一。本文在VS2010平台上,利用RTKLIB软件进行了GPS静态PPP、动态PPP实验,对解算结果进行了分析,以期为PPP工程应用提供一定参考。
1 PPP函数模型与处理策略
1.1函数模型
卫星定位基本原理是空间距离后方交会,伪距和载波的基本观测方程如下:
(1)
(2)
其中、分别是伪距和载波相位观测值,上标j表示卫星,下标i表示接收机;表示卫星j到接收机i的几何距离;c是真空中的光速;是接收机钟差;卫星钟差;是电离层延迟,是对流层延迟;、是伪距和相位观测值中的卫星天线相位中心改正、接收机天线相位中心改正、多路径效应改正、相对论效应改正、潮汐改正、天线相位缠绕改正等改正项之和。是载波的波长,N是整周模糊度;、分别是伪距和相位观测值的噪声。
1.2处理策略
PPP采用的是非差观测值,对于各项误差源的处理主要有参数估计、模型改正以及使用组合观测值进行削弱。具体处理策略为估计接收机钟差、海洋潮汐采用FES2004.blq模型,对流层延迟采用Saastamoinen模型,卫星轨道/钟差采用事后精密产品。
2 数据处理与结果分析
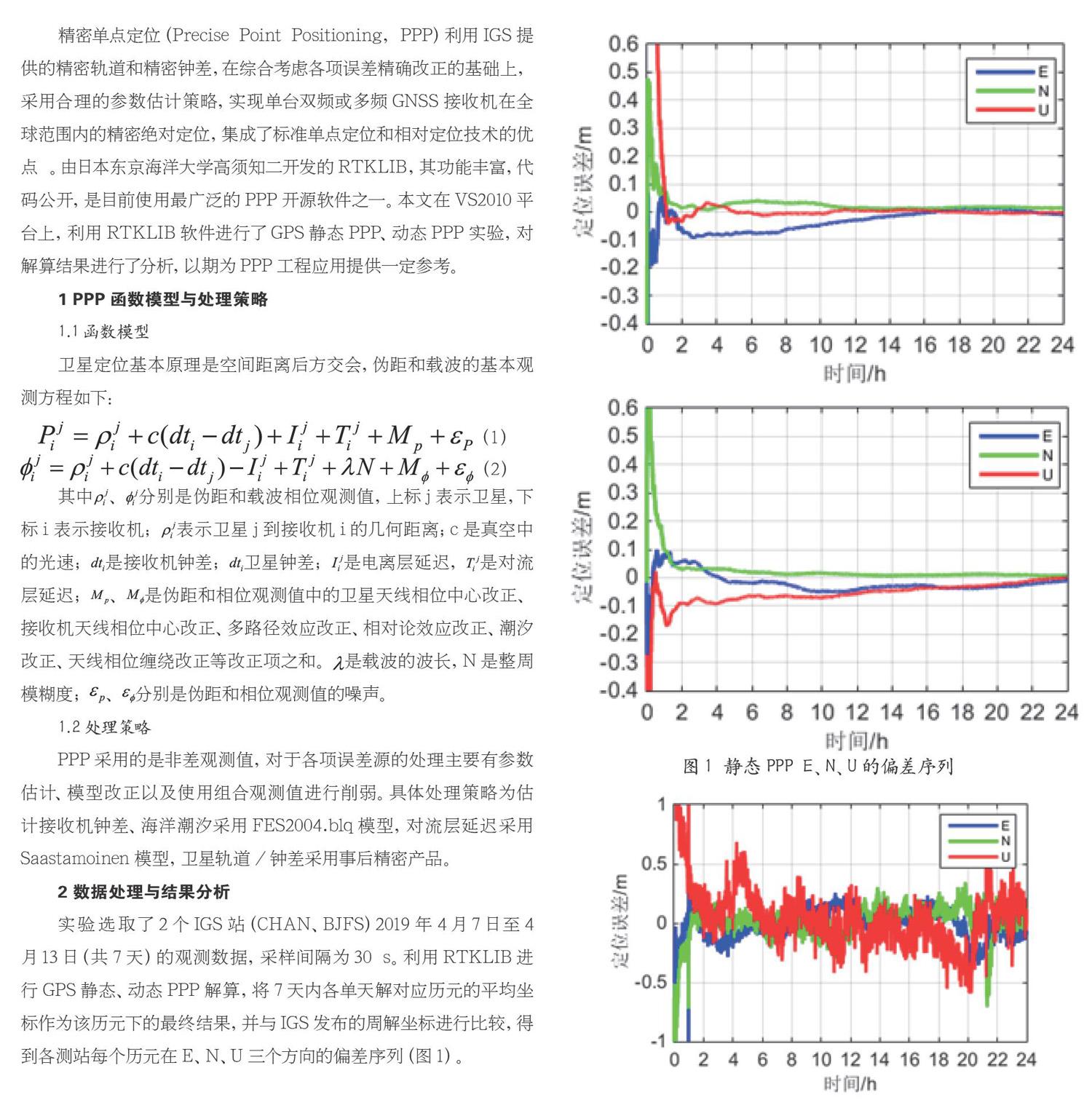
实验选取了2个IGS站(CHAN、BJFS)2019年4月7日至4月13日(共7天)的观测数据,采样间隔为30 s。利用RTKLIB进行GPS静态、动态PPP解算,将7天内各单天解对应历元的平均坐标作为该历元下的最终结果,并与IGS发布的周解坐标进行比较,得到各测站每个历元在E、N、U三个方向的偏差序列(图1)。
图1给出各测站静态PPP 7天综合解在E、N、U三个方向的偏差序列。各测站都能在2 h之内收敛至10 cm,24小时N、E方向精度优于1 cm, U方向优于3 cm。动态PPP将测站模型化为白噪声,即每一个历元估计一组位置参数。图2给出了各测站动态PPP 7天综合解在E、N、U三个方向的偏差序列。实验结果表明N、E方向偏差在0.1 m左右,U方向解算精度较差,偏差在0.3 m左右。部分历元出现跳跃,达到0.5 m,可能的原因是跟踪卫星数目发生变化,空间几何强度变弱。
3 结束语
本文基于VS2010的RTKLIB软件,利用2个IGS站一周观测数据进行了静态、动态精密单点定位实验。实验表明2 h静态精密单点定位 N、E、U 3个方向能收敛至0.1 m,24 h精度优于1 cm。动态精密单点定位受测站上空卫星空间几何构型影响较大,N、E方向精度0.1 m,U方向0.3 m。
参考文献
[1]李盼.GNSS精密单点定位模糊度快速固定技术和方法研究[D].武汉大学,2016.
[2]魏二虎,刘学习,王凌轩等.BDS/GPS组合精密单点定位精度分析与评价[J].武汉大学学报(信息科学版),2018,43(11):1654-1660.
[3]宋佳,李敏,赵齐乐等.3种开源精密单点定位软件性能评估[J].大地测量与地球动力学,2017,37(06):627-632.
[4]苗维凯,陈旭升,刘洋洋.GNSS多系统组合PPP解算方法与成果分析[J].大地测量与地球动力学,2019,39(05):521-527.
[5]李林阳,吕志平,翟树峰等.Galileo/GPS精密单点定位收敛时间与定位精度的比较与分析[J].测绘科学技术学报,2018,35(02):159-164.
本文由大学生创新训练项目“基于北斗/GPS定位的无人消毒车”资助,项目编号:202010294156Y。
