基于视频监控的交通流参数检测
2020-10-12刘海艳李俊敏
刘海艳 李俊敏


摘要:智能交通系统(Intelligent Transportation System,ITS)是目前缓解城市交通压力、解决交通拥堵问题的一种高效方法。短时车流量的采集与预测是智能交通系统的重要组成部分。本文介绍了基于视频监控的交通流参数检测技术,引入混合高斯模型建立背景模型,通过背景差分法提取前景车辆,使用卡尔曼滤波方法对目标车辆进行跟踪和预测,基于MATLAB GUI建立车流量检测系统,可显示当前车辆目标的数量和车辆总数,为实现交通诱导、违章监控、速度监控等提供可靠准确的数据支持。
关键词:视频监控 高斯模型 卡尔曼滤波 车流量
1 引言
随着社会的高速发展,人民生活得到巨大改善,民众汽车持有量显著提升,交通拥挤现象频繁发生。智能交通系统(Intelligent Transportation System,ITS)是目前缓解城市交通压力、解决交通拥堵问题的一种高效方法。车流量的采集与预测是智能交通系统的重要组成部分,实时准确的获取车流量信息有助于保障城市道路的畅通,同时为城市交通的诱导和控制提供可靠准确的数据支持,是缓解交通拥堵、减少交通事故发生率的基础和关键。
传统的交通流量检测有电磁感应线圈、超声波检测、微波检测和红外光标及基于视频的流量检测等多种方式。其中,基于视频的车流量统计方法具有不破坏路面、安装简单、获得参数更多、更直观、监测范围广等优点,近些年得到越来越广泛的应用。
2 视频信号处理
安装于道路两侧的视频监控单元通过网络与远端服务器进行通信,将读取到包含车辆信息的视频进行简单处理压缩,通过网络传输至总服务器端,服务器端对获取信息进行综合处理,将车辆信息、车辆位置实时传递给交通管理中心,通过数据分析、信息比对等为交通指挥决策提供科学依据,提高交通管理的信息化水平。
车辆目标的检测主要分为三个步骤:背景模型的建立、运动目标提取、目标跟踪及车辆计数。
2.1背景模型的建立与更新
针对道路背景多模态的特性,引入混合高斯模型来解决该问题,对每个像素建立一个多分布混合高斯模型用来表征该像素的灰度值或颜色的变化,并根据权值和方差来决定哪些分布代表背景颜色,然后用采集到的每一帧图像与这些分布进行匹配,来决定哪些像素属于前景,由于场景的动态变化,所以还需要对各分布的权值、均值和方差进行实时更新以适应环境的变化。
混合高斯模型的概率密度函数公式如(式1)和(式2)所示。
(式1)
(式2)
式中各参量的含义分别为:表示视频第t帧图像在图像坐标为(x,y)处的高斯分布量的权重值;表示在(x,y)图像像素点的第i个高斯分布均值向量;表示协方差矩阵;E表示单位矩阵;表示视频中第t帧的图像在(x,y)像素点的第i个高斯分布方差。基于概率密度原理,可以构建由K个高斯分布的混合高斯模型。
混合高斯模型背景建立的步骤如下。
(1)参数初始化
定义参数学习率变量来反映高斯分布函数的收敛速度 ,第一帧图像的每个像素点的高斯分布的权重初始化为,并对均值和方差进行初始化,见 (式3)和 (式4)。
(式3)
(式4)
(2)参数更新
混合高斯模型的参数更新即高斯分布权重的参数更新,对于像素点It-1的 K个高斯分布根据其权重的大小进行排序,然后进行重新的匹配,其公式如下:
(式5)
其中C在混合高斯模型的建模中常取值為2.5,即将每个像素值与当前的K个模型进行比较,直到找到匹配新像素值的分布模型,符合匹配公式即为背景,否则即为前景。在视频变化时,需要不断更新权重参数。
(3)背景模型的建立
对K个高斯分布按照进行降序排列,权重大、标准差小的模式排列靠前,选取前Bt个高斯分布作为背景模型,如(式6)所示。
(式6)
式中T为自定义的权重阈值。
2.2背景差分法车辆提取
利用混合高斯模型建立了背景模型之后,通过可调参数的合理范围设置能够提取包含车辆目标的前景图像。在此基础上,从提取的前景图像中获得车辆目标,即完成车辆目标的分割处理,图像分割是在包含前景的图像中确定目标即完成目标检测,选用的目标检测方法为背景差分法,即首先基于混合高斯模型完成背景的提取,然后利用前景图像减去背景图像进行差分,得到前景图像的二值化图像,如图1所示。利用形态学运算对目标区域进行处理,消除噪声及小散点的干扰,填充孔洞区域,提取车辆目标,处理结果如图2所示。
2.3车辆跟踪
车辆目标跟踪和预测使用卡尔曼滤波方法,通过对车辆的运动质心进行估计,预测出下一时刻的车辆的质心位置和区域。卡尔曼滤波方法由前一时刻的状态得到后一时刻的状态的基本方程如(式7)所示:
(式7)
式中:表示k时刻的车辆目标的状态向量;F为传递矩阵,其维数为n;的功能是施加于系统的外部控制;B是控制矩阵,将外部控制与状态变化之间建立关系;是随机变量,并被假设具有高斯分布。
同时,卡尔曼滤波在校正过程还需利用当前的测量值,而当前的测量值是很难直接获取的,可通过测量值进行转换,如(式8)所示。
(式8)
式中:H为测量矩阵;是测量过程产生的误差,假设其具有高斯分布。
2.4基于GUI的车流量检测系统的建立
基于前述视频处理原理,建立了基于MATLAB GUI的车流量检测系统,由几部分组成:视频信息的导入和处理、当前车辆目标的数量显示、车辆总数的显示、识别的车辆目标的实时跟踪和轨迹显示。其显示界面如图3所示。
3 实验分析
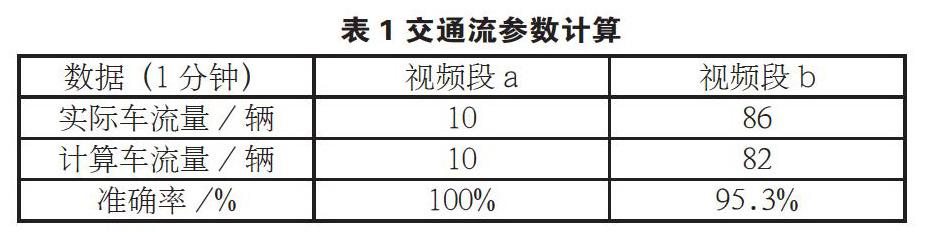
本文采集来自2段不同路段视频进行处理,a段截取自绕城闸道入口,车流密度较低,b段截取自城市道路主路口,车流密度较大。
利用本文设计的车流量检测系统进行数据处理,实验数据如下表1,从表中可以看出对于车流量较小的场合,本系统算法准确率较高。在车流量密度较大的场合,多个车辆互相遮挡,导致车辆前景分割时,粘连发生,则多个车流量被认为是一个运动目标,分割不准确,进而导致计数错误。
4 结论
本文针对交通流的视频监控进行了交通流参数的测量,考虑由于天气等因素影响路段光线,采用不调整参数的混合高斯模型建立背景模型,背景差分法提取前景车辆,使用卡尔曼滤波方法对目标车辆进行跟踪和预测,实现当前路段车辆的计数,有效的提高了车辆识别的效率和精度,为道路交通流参数测量提供了一种新的测量方法。
参考文献
[1]柳长源,曹园园,罗一鸣.基于视频图像的车辆实时检测系统[J].计算机工程2019 (8): 265-269+277.
[2]夏莹杰,欧阳聪宇,夏莹杰,等.面向高速公路抛洒物检测的动态背景建模方法[J].浙江大学学报:工学版,2020, 54(7): 17.
[3]刘云霄.基于图像信息的道路车流量检测算法研究与实现[D].南京:南京航空航天大学,2019.
[4]吴志伟,基于视频的车流量检测技术研究[D].广州:华南理工大学,2012.
项目来源
校级科研项目,编号 2018ZRKX0401010。
