柔性励磁系统提升低频段阻尼的优化设计方法
2020-10-09吴跨宇张甜甜张建承余明浩毛承雄熊鸿韬王丹
吴跨宇 张甜甜 张建承 余明浩 毛承雄 熊鸿韬 王丹

摘 要:針对目前工程使用的B型加速功率型电力系统稳定器(PSS2B)在低频振荡(LFO)高频段增益突增,导致其对更低频率的低频振荡抑制效果不佳的问题,提出利用柔性励磁系统(一种基于大功率电力电子全控器件的新型励磁系统)具有双阻尼通道的特性,协调优化双阻尼通道控制器以提升低频振荡全频段的阻尼比。在设计常规PSS2B型电力系统稳定器的基础上,优化设计无功阻尼控制器(RPDC)以提升0.1~0.5 Hz频率段阻尼比。在无功阻尼控制器中加入带通滤波器,用以削减频率区间0.1~0.5 Hz以外的信号,并基于阻尼转矩分析法及粒子群优化算法,以提升0.1~0.5 Hz频率段阻尼比,同时不减弱其他低频振荡频率段抑制效果为目标设计无功阻尼控制器参数。仿真结果表明,采用所提优化设计方法设计的柔性励磁系统能够为电力系统在更宽频段提供更好的阻尼特性。
关键词:柔性励磁系统;双通道;阻尼特性;0.1~0.5 Hz频率段;优化设计;无功阻尼控制器
DOI:10.15938/j.emc.2020.09.012
中图分类号:TM 712
文献标志码:A
文章编号:1007-449X(2020)09-0105-10
Optimum design method of flexible excitation system for improving damping of low frequency oscillation
WU Kua-yu1, ZHANG Tian-tian2, ZHANG Jian-cheng1, YU Ming-hao2, MAO Cheng-xiong2, XIONG Hong-tao1, WANG Dan3
(1.State Grid Zhejiang Electric Power Research Institute, Hangzhou 310007, China; 2.State Key Laboratory of Advanced Electromagnetic Engineering and Technology, Huazhong University of Science and Technology, Wuhan 430074, China;3.Hubei Electric Power Security and High Efficiency Key Laboratory, Huazhong University of Science and Technology,Wuhan 430074, China)
Abstract:
The ability of type B accelerating power type power system stabilizer (PSS2B) used in modern engineering on suppressing the lower-frequency range of the low frequency oscillation (LFO) is limited by the restricted gain over the higher-frequency range of LFO. Aiming at this problem, the flexible excitation system consisting of full-controlled devices has two damping channels, which can be designed to improve the damping over the full-frequency range of LFO. The reactive power damping controller (RPDC) was designed based on the proposed optimum design method to improve the damping over the oscillation frequency of 0.1 to 0.5 Hz, while PSS2B was designed based on the traditional method. The band-pass filter was used to decay the signal out of the oscillation frequency of 0.1 to 0.5 Hz. Based on the torque analysis, RPDC was designed to improve the damping over the oscillation frequency of 0.1 to 0.5 Hz, meanwhile not reducing the damping out of the target frequency range by use of the particle swarm optimization. The simulations show that the flexible excitation system can provide better damping characteristics to stable the power system over the full frequency range of LFO.
Keywords:flexible excitation system; two damping channels; damping characteristics; oscillation frequency of 0.1 to 0.5 Hz; optimum design method; reactive power damping controller
0 引 言
随着大容量机组、远距离输电、重负荷线路、现代快速励磁、特高压交直流技术、新能源机组大规模建设及并网运行,大规模储能系统如压缩空气储能在电力系统中的广泛应用,电力系统电力电子化趋势加快,电力系统的安全稳定运行受到严重威胁[1-5]。低频振荡的风险日渐加剧,电力系统稳定器(power system stabilizer, PSS)是抑制低频振荡的一种有效而经济的方法[6-9]。另一方面,随着中国电力系统联网程度提高,系统中出现了频率在0.2 Hz左右甚至更低的振荡模式,我国已要求励磁控制能覆盖低至0.1 Hz的低频振荡[10-11]。
工程使用的PSS由于具有多级超前补偿环节,导致高频段增益猛增,限制了中低频段增益,从而大幅度限制了对中低频段振荡的抑制能力[11]。针对这一问题,目前研究主要倾向于对加速功率型电力系统稳定器(accelerating power type PSS, PSS2)結构进行改进[10-11]及优化多频段电力系统稳定器(multi-band power system stabilizer, PSS4B)参数设计算法[12-14]。PSS4B不同于PSS2型的单分支结构,其是将输入信号处理后分为高频段、中频段、低频段的多频段稳定器,不同于PSS2型结构中直接对低频振荡整个频率段进行参数整定,PSS4B可以单独调节各个频段的相位和增益,但是各个频段参数之间相互影响,参数整定比较复杂。文献[10]修改B型加速功率型电力系统稳定器(type B accelerating power type PSS, PSS2B)控制器结构,使通过相位补偿前的信号超前转速信号90°,使得PSS在低频段实现滞后补偿,高频段超前角度减小,从而解决高频段增益单向增加问题,但是该方法在转速通道引入微分环节,容易产生噪声。文献[12]通过设置一个转折频率为3 Hz左右的滞后环节,以牺牲一定相位补偿为代价,减小高频段增益,但是该方法并不能解决高频段增益单向增加问题。
随着电力电子技术的发展,基于全控器件的同步发电机励磁系统被提出,其在实现现有励磁系统功能的同时,还能通过调节与网侧交换的无功功率来提供额外阻尼通道[15-18]。目前仅研究了柔性励磁系统提升本机振荡阻尼比的能力。
本文利用柔性励磁系统具有双阻尼通道的特性,在设计常规PSS2B型电力系统稳定器的基础上,利用无功阻尼控制器(reactive power damping controller, RPDC)实现在提升0.1~0.5 Hz频率段阻尼比的同时,不对其他频段阻尼产生副作用。首先,在已有柔性励磁系统研究的基础上,基于扩展的Philips-Heffron模型,建立了包含电压调节器(automatic voltage regulator,AVR)、PSS2B和RPDC的系统电磁转矩方程;其次,设计无功控制通道带通滤波器抑制0.1~0.5 Hz频率段以外信号;然后,以0.1~0.5 Hz频段相位全补偿,中高频段不提供负阻尼为目标,利用粒子群优化算法进行控制器参数设计;最后,仿真算例验证了本文所提的控制方法在提升低频段阻尼比方面的有效性。
1 柔性励磁系统数学模型
电压源型变换器(voltage source converter, VSC)相较于电流源型变换器(current source converter, CSC)应用更广,故对电压源型柔性励磁系统进行分析。图1是采用柔性励磁的单机无穷大系统,另外,通过电网等值可以将多机系统等值为单机无穷大系统进行分析。
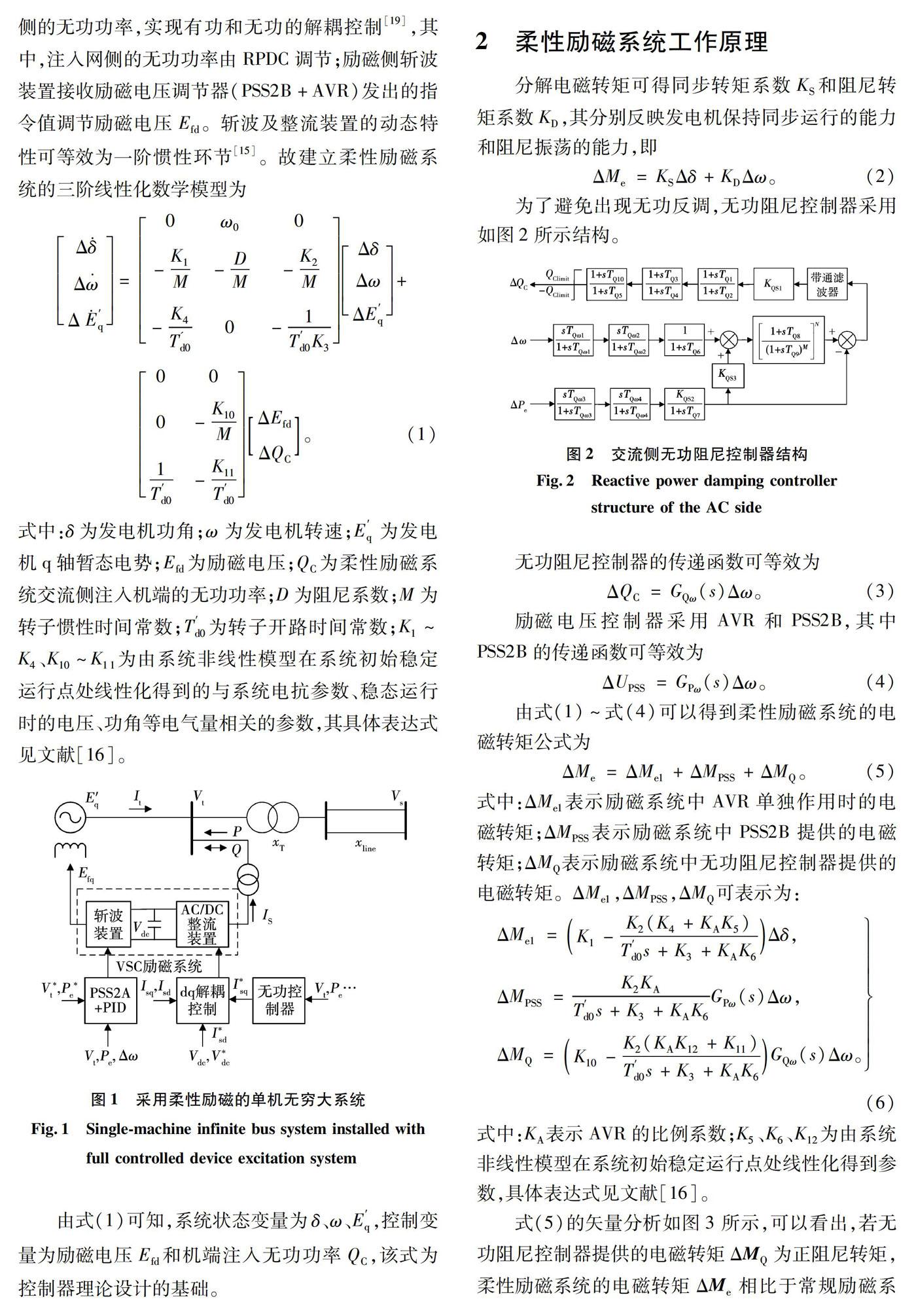
柔性励磁系统由整流装置、斩波装置、电容器及相应的控制器组成。由全控器件构成的AC/DC整流装置通过调节励磁系统注入发电机机端的交流电流的d轴和q轴分量来控制电容电压Vdc和注入网侧的无功功率,实现有功和无功的解耦控制[19],其中,注入网侧的无功功率由RPDC调节;励磁侧斩波装置接收励磁电压调节器(PSS2B+AVR)发出的指令值调节励磁电压Efd。斩波及整流装置的动态特性可等效为一阶惯性环节[15]。故建立柔性励磁系统的三阶线性化数学模型为
Δδ·Δω·ΔE·′q=0ω00-K1M-DM-K2M-K4T'd00-1T′d0K3ΔδΔωΔE′q+
000-K10M1T′d0-K11T′d0ΔEfdΔQC。(1)
式中:δ为发电机功角;ω为发电机转速;E′ q为发电机q轴暂态电势;Efd为励磁电压;QC为柔性励磁系统交流侧注入机端的无功功率;D为阻尼系数;M为转子惯性时间常数;T′d0为转子开路时间常数;K1~K4、K10~K11为由系统非线性模型在系统初始稳定运行点处线性化得到的与系统电抗参数、稳态运行时的电压、功角等电气量相关的参数,其具体表达式见文献[16]。
由式(1)可知,系统状态变量为δ、ω、E′q,控制变量为励磁电压Efd和机端注入无功功率QC,该式为控制器理论设计的基础。
2 柔性励磁系统工作原理
分解电磁转矩可得同步转矩系数KS和阻尼转矩系数KD,其分别反映发电机保持同步运行的能力和阻尼振荡的能力,即
ΔMe=KSΔδ+KDΔω。(2)
为了避免出现无功反调,无功阻尼控制器采用如图2所示结构。
无功阻尼控制器的传递函数可等效为
ΔQC=GQω(s)Δω。(3)
励磁电压控制器采用AVR和PSS2B,其中PSS2B的传递函数可等效为
ΔUPSS=GPω(s)Δω。(4)
由式(1)~式(4)可以得到柔性励磁系统的电磁转矩公式为
ΔMe=ΔMe1+ΔMPSS+ΔMQ。(5)
式中:ΔMe1表示励磁系统中AVR单独作用时的电磁转矩;ΔMPSS表示励磁系统中PSS2B提供的电磁转矩;ΔMQ表示励磁系统中无功阻尼控制器提供的电磁转矩。ΔMe1,ΔMPSS,ΔMQ可表示为:
ΔMe1=K1-K2(K4+KAK5)T′d0s+K3+KAK6Δδ,
ΔMPSS=K2KAT′d0s+K3+KAK6GPω(s)Δω,
ΔMQ=K10-K2(KAK12+K11)T′d0s+K3+KAK6GQω(s)Δω。(6)
式中:KA表示AVR的比例系數;K5、K6、K12为由系统非线性模型在系统初始稳定运行点处线性化得到参数,具体表达式见文献[16]。
式(5)的矢量分析如图3所示,可以看出,若无功阻尼控制器提供的电磁转矩ΔMQ为正阻尼转矩,柔性励磁系统的电磁转矩ΔMe相比于常规励磁系统产生的电磁转矩ΔMe2可以分解出更大的阻尼转矩系数,更利于电力系统稳定运行。
3 无功阻尼控制器参数设计方法
在上述柔性励磁系统数学模型及整体转矩分析的基础上,利用柔性励磁系统双阻尼通道的特性,在不影响常规PSS2B低频振荡抑制能力的同时,通过设计无功阻尼控制器参数,提升PSS2B作用效果不佳的0.1~0.5 Hz频段阻尼比,实现低频振荡全频段振荡抑制。
由式(5)、式(6)可知,PSS2B和无功阻尼控制器在进行时间常数设计时耦合很小,所以可以单独对无功阻尼控制器参数进行设计。通过分析可知,无功阻尼控制器需要设置超前环节实现相位补偿,故在无功阻尼控制器通道设置带通滤波器,一方面削弱0.1~0.5 Hz以外振荡信号,另一方面避免出现高频段增益单向递增,从而限制低频段振荡抑制效果的现象。
3.1 带通滤波器参数设计
无功阻尼控制器主要用于提升0.1~0.5 Hz频率段阻尼比,故设计带通滤波器并采用如图4所示的滤波器结构。
图4所示带通滤波器的传递函数[12]为
Gbp(s)=1+TRs1+Ts-1+Ts1+TRs=
R2+1-2RR+R21+RTRss2+1+RTRs+1T2R。(7)
式中R表示补偿系数,决定了带通的宽度。
由式(7)可得该带通滤波器中心频率及最大幅值为:
ωd=1TR=2πfd,
|G(jωd)|=R2+1-2RR+R2。(8)
为了减小带通滤波器带来的增益变化,设置参数K使得带通滤波器中心频率处增益为1,故可得带通滤波器参数计算公式为:
T=12πfdR,
K=R2+RR2-2R+1。(9)
式中:R采用典型值1.2;根据确定的分析频率段选择中心频率fd为0.1 Hz;计算得到T=1.45,K=66。
3.2 无功阻尼控制器超前滞后环节参数设计
由图3可知当无功阻尼控制器提供的电磁转矩ΔMQ与Δω位于第一象限时,无功阻尼控制器可以提供正的阻尼转矩系数及同步转矩系数,并且当ΔMQ与Δω同相时,无功阻尼控制器能够最大程度地向系统提供正阻尼。式(6)中,令
GQ(s)=K10-K2(KAK12+K11)T′d0s+K3+KAK6。(10)
无功阻尼控制器设计目标是:使无功阻尼控制器在不影响其他频段阻尼比的前提下,最大程度地提升0.1~0.5 Hz频率段阻尼比。
为了实现上述控制目标,采用粒子群算法设计无功控制器参数,粒子群优化算法是一种现代的启发式随机算法,具有编程简单、收敛速度快、鲁棒性强等特点。
粒子群优化算法目标函数为
minJ=∑Nn=1|∠GQω(fn)+∠GQ(fn)|。(11)
式中:fn表示研究0.1~0.5 Hz频段内按采样间隔采样的第n个频率;N表示按照一定采样间隔选择的频率点总数。
约束条件为:
∠GQω(fns)+∠GQ(fns)≤0°,
-90°-(∠GQω(fns)+∠GQ(fns))≤0°,
Tmin≤TQ(1~6)≤Tmax。(12)
式中:fns表示整个低频振荡频率段0.1~3 Hz内按采样间隔取值的每个振荡频率;一个超前滞后环节一般实现60°的超前滞后相位补偿,考虑整定频率范围为0.1~0.5 Hz,故选择Tmin、Tmax的取值范围是[0.01,5.0]。
采用惩罚策略处理优化模型中的约束条件[20],将式(11)的目标函数修正为
minJ=∑Nn=1|∠GQω(fn)+∠GQ(fn)|+∑Mns=1λ(t)H(fns)。(13)
式中:λ(t)H(fns)为惩罚项,表示对每个粒子在每个分析频率点超出约束条件的惩罚;λ(t)=t是惩罚函数的因子,t表示粒子群算法的迭代次数;M为0.1~3 Hz频段采样点总数;H(fns)是惩罚项,表达式为:
H(fns)=∑mi=1θ(pi(fns))pi(fns)α,
pi(fns)=max{0,gi(fns)}。(14)
式中:m表示约束条件个数,本文中约束条件个数为2;gi(fns)为约束条件,由式(12)可得:
g1(fns)=∠GQω(fns)+∠GQ(fns),
g1(fns)=-90°-[∠GQω(fns)+∠GQ(fns)]。(15)
θ(pi(fn))为多级分配函数,可由下式确定:
1)当pi(fn)<1时,α=1,有:
θ(pi(fn))=10,0 20,0.001 100, 0.1 2)当pi(fn)≥1时,α=2,θ(pi(fn))=300。 因此,利用粒子群优化算法进行参数寻优的过程如下,其中粒子群算法迭代过程中选择典型参数: 1)种群初始化。种群规模为100,最大迭代次数为100,最小适应度值为0.1,惯性因子为0.6,加速时间常数c1、c2均为2.05,搜索空间维数为6,待优化的时间常数取值范围为[0.01,5.0],在给定的取值范围内,确定粒子群及初始速度。 2)计算粒子的适应度函数值。选择频率采样间隔为0.01 Hz,根据式(13)计算粒子适应度函数值。 3)根据每个粒子的适应度函数值,更新全局极值(pgbest)和个体极值(pbest)。 4)更新粒子位置和速度。 5)判断是否达到最大迭代次数100或者适应度值是否小于0.1,如果达到约束条件,则返回当前最佳粒子并且算法结束,否则返回2),继续下一个循环。 3.3 柔性励磁系统控制器参数设计流程 柔性励磁系统控制器主要为AVR,PSS和RPDC,AVR和PSS遵循典型的参数设计方法,故根据以上关于无功阻尼控制器参数设计方法的分析,得到柔性励磁系统控制器参数设计步骤: 1)由发电机空载阶跃响应整定电压调节器AVR参数; 2)按照相位补偿法及临界增益法设计PSS2B控制器参数; 3)按照3.1节所述带通滤波器参数设计方法设计带通滤波器参数; 4)基于式(5)、式(6)的电磁转矩公式及3.2节所述粒子群优化算法进行参数寻优的流程,計算得到无功阻尼控制器的时间常数; 5)采用临界增益法确定无功阻尼控制器增益,逐步增大无功阻尼控制器增益,直至无功阻尼控制器输出无功出现发散振荡,此时的KQS1为无功阻尼控制器临界放大倍数,无功阻尼控制器增益为临界放大倍数的1/5~1/3。 4 仿真分析 在SIMULINK中搭建安装有柔性励磁系统的单机无穷大系统模型,通过修改时间常数TJ构造不同的系统振荡频率。 4.1 控制器参数设计 针对某电厂进行参数设计,发电机参数为:xd=1.086;xq=0.71;x′d=0.314;x′q=0.64;T′d0=7.31;TJ=6.8;机端变压器参数xT=0.073;单回输电线路参数xline=0.022。设置发电机初始运行点为Pe0=0.85,cosφ=0.85,Vt0=1。 按照控制器参数设计步骤得到AVR参数为:KA=100;Ti=4。PSS2B和无功阻尼控制器参数分别如表1和表2所示。 由此得无功阻尼控制器在单位比例增益下无功控制输出至功率偏差输入通道增益随频率变化曲线如图5所示。可知,随着频率的增加,无功控制通道增益单调递减,不会出现高频段增益突增限制低频段阻尼效果的情况,且当f>0.5 Hz时,通道增益小,无功控制器对于中高频段低频振荡影响较小。 根据所得超前滞后时间常数,可得无功阻尼控制器的相位补偿特性如表3所示。其中:φ1表示无功控制通道无补偿相位特性;φ2表示无功阻尼控制器补偿相位;φ3表示无功控制通道补偿后相位。 由表3中数据可知,在设计的0.1~0.5 Hz频段内补偿后相位基本在滞后Δω轴20°位置处,无功阻尼控制器相位补偿满足设计要求,可以提供较强阻尼比,并且在其他频段内,补偿后相位最大滞后Δω轴60°左右,提供少量正阻尼。由此可知,按照改参数设计方法设计的参数,理论上可以在不削弱其他频段阻尼比的同时提升0.1~0.5 Hz频段阻尼,接下来通过仿真进行验证。 4.2 仿真分析 在SIMULINK中搭建单机无穷大系统模型,修改时间常数TJ构造不同振荡频率。在t=2 s设置机端电压阶跃2%响应对比验证柔性励磁系统在提升小信号稳定方面的优越性,结果如图6、图7所示。在t=2 s设置变压器高压侧三相短路故障,故障在0.1 s后切除,对比验证柔性励磁系统在提升暂态稳定方面的优越性,结果如图8、图9所示。 1)小信号稳定性验证。 图6、图7分别表示在振荡频率为0.4 Hz和0.23 Hz情况下,柔性励磁系统和常规励磁系统抑制发电机机端电压参考值阶跃2%响应的仿真结果,由图可知,柔性励磁系统相较于常规励磁系统可以更快抑制振荡并且减小振荡幅值。为了更加直观地分析2种系统的作用效果,分析不同振荡频率下的阻尼比,其结果如表4所示,其中系统本机振荡频率为1.33、1.75 Hz,0.4及0.23 Hz分别为修改TJ后系统振荡频率,由表中数据可知,对于本机振荡频率及高于本机振荡的频率,柔性励磁系统阻尼比稍有提升,而对于0.1~0.5 Hz频率范围的振荡频率0.4及0.23 Hz,柔性励磁系统提升阻尼比比例分别为108.4%和170.2%,具有很好的阻尼提升效果。可知,柔性励磁系统在不影响中高频振荡阻尼比的情况下,在低频段有很好的阻尼比提升效果。 2)暂态稳定性验证。 为了进一步验证柔性励磁系统在0.1~0.5 Hz频率范围内提升系统暂态稳定的性能,设置升压变压器高压侧三相短路故障,图8、图9分别表示在振荡频率为0.4和0.23 Hz情况下,柔性励磁系统和常规励磁系统抑制三相短路故障的仿真结果。 由图8可知,当系统发生0.4 Hz的振荡时,柔性励磁系统可以在故障后8 s左右将故障切除而常规励磁系统的故障切除时间大于14 s。由图9可知,当系统发生0.23 Hz的振荡时,柔性励磁系统也具有更快的故障切除时间及更小的振荡幅值。 由以上仿真分析结果可知,与常规励磁系统相比,柔性励磁系统可以有效提升其主要关注频率段0.1~0.5 Hz的小干扰稳定性和暂态稳定性,有效提升系统阻尼比,减小故障消除时间,降低振荡幅值,此外对于常规励磁系统本身作用效果较好的中高频段,柔性励磁系统不会起到反作用。 5 结 论 本文利用柔性励磁系统双阻尼通道特性,在设计常规PSS2B型电力系统稳定器的基础上,利用无功阻尼控制器提升0.1~0.5 Hz频率段阻尼比。首先,在已有柔性励磁系统研究的基础上,推导得到包含AVR、PSS2B及RPDC的柔性励磁系统转矩公式;其次,通过在无功阻尼控制器中设计带通滤波器,削弱0.1~0.5 Hz以外频率信号,并由此实现无功控制器通道增益随频率单调递减,避免了高频段增益对低频段阻尼比的限制;再次,采用粒子群优化算法给出了无功阻尼控制器参数设计方法,使其能够在不影响其他频段阻尼比的同时,提升系统0.1~0.5 Hz频率段阻尼比。最后,在0.1~0.5 Hz频率段内设置不同振荡频率下发电机机端电压阶跃2%响应,变压器高压侧三相短路故障验证了柔性励磁系统在提升0.1~0.5 Hz频率段小干扰及暂态稳定性的优越性。 参 考 文 献: [1] 宋墩文,杨学涛,丁巧林,等.大规模互联电网低频振荡分析与控制方法综述[J].电网技术,2011,35(10):22. SONG Dunwen,YANG Xuetao,DING Qiaolin,et al.A survey on analysis on low frequency oscillation in large-scale interconnected power grid and its control measures[J].Power System Technology,2011,35(10):22. [2] 嚴伟佳,蒋平.抑制区域间低频振荡的FACTS阻尼控制[J].高电压技术,2007(1):189. YAN Weijia,JIANG Ping.Damping control with FACTS aiming at damping inter-area oscillation[J].High Voltage Engineering,2007(1):189. [3] 魏波涛,沈将军,阎吉,等.附加阻尼控制抑制电力系统低频振荡研究[J].自动化应用,2016(12):24. WEI Botao,SHEN Jiangjun,YAN Ji,et al.Research on suppression of low frequency oscillation in power system by additional damping control[J].Automation Application,2016(12):24. [4] 张学广,邱望明,方冉,等.基于变流器改进控制的双馈风电机组SSO抑制方法[J].电机与控制学报,2020,24(2):2. ZHANG Xueguang, QIU Wangming, FANG Ran, et al. SSO mitigation method of DFIG based on improved control of converter[J]. Electric Machines and Control, 2020,24(2):2. [5] 李辉,陈耀君,李洋,等.双馈风电场并网对汽轮发电机次同步振荡的影响[J].电机与控制学报,2015,19(6):48. LI Hui, CHEN Yaojun, LI Yang, et al. Impact of DFIG-based wind farms interconnected to power grid on subsynchronous oscillation of turbogenerator[J]. Electric Machines and Control, 2015,19(6):48. [6] 陈宝平,林涛,陈汝斯,等.直驱风电场经VSC-HVDC并网系统的多频段振荡特性分析[J].电工技术学报,2018,33(S1):177. CHEN Baoping, LIN Tao, CHEN Rusi, et al. Characteristics of multi-band oscillation for direct drive wind farm interfaced with VSC-HVDC system[J]. Transactions of China Electrotechnical Society, 2018,33(S1):177. [7] 任必兴,杜文娟,王海风.UPFC与系统的强动态交互对机电振荡模式的影响[J].电工技术学报,2018,33(11):2521. REN Bixing, DU Wenjuan, WANG Haifeng. Impact of strong dynamic interaction between UPFC and system on electromechanical oscillation mode[J]. Transactions of China Electrotechnical Society, 2018,33(11):2521. [8] 和萍,文福拴,薛禹胜,等.四种电力系统稳定器的性能比较[J].电力系统自动化,2013,37(3):30. HE Ping,WEN Fushuan,XUE Yusheng,et al.Performance comparison of four kinds of power system stabilizers[J].Automation of Electric Power Systems,2013,37(3):30. [9] 袁亚洲,许其品,徐蓉,等.基于RTDS的多频段电力系统稳定器效果验证[J].电力系统自动化,2013,37(18):126. YUAN Yazhou,XU Qipin,XU Rong,et al.Effect verification of multiband power system stabilizer based on TRDS[J]. Automation of Electric Power Systems,2013,37(18):126. [10] 吴跨宇,卢岑岑,吴龙,等.一种新型双信号电力系统稳定器及其仿真研究[J].电网技术,2016,40(5):1462. WU Kuayu,LU Cencen,WU Long,et al.A new PSS with double-signal input and its simulation research[J].Power System Technonlogy,2016,40(5):1462. [11] 吴剑超,霍承祥,党杰,等.提高电力系统稳定器增益的相位幅值协调优化方法[J].电力系统自动化,2018,42(24):203. WU Jianchao,HUO Chengxiang,DANG Jie,et al.Phase and amplitude coordination optimization method for improving gain of power system stabilizer[J].Automation of Electric Power System,2018,42(24):203. [12] 赵晓伟,谢欢,吕思昕,等.电力系统稳定器PSS4B的参数整定及现场试验[J].电网技术,2016,40(2):508. ZHAO Xiaowei,XIE Huan,L Sixin,et al.Parameter setting and on-site test of power system stabilizer-PSS4B[J].Power System Technonlogy,2016,40(2):508. [13] 刘英超,王德林,康积涛,等.新型电力系统稳定器PSS4B参数优化整定方法[J].电工技术,2017(5):16. LIU Yingchao,WANG Delin,KANG Jitao,et al.The parameter optimization method of power system stabilizer-PSS4B[J].Electric Engineering,2017(5):16. [14] JIA L,GAO X,XU Y,et al.Application of PSS4B stabilizers in suppressing low frequency oscillations: A case study[C]//2015 Power & Energy Society General Meeting, July 26-30, 2015, Denver, USA. 2015: 1-5. [15] ZHOU Y,MAO C,CHEN Z,et al.A novel control strategy for static excitation system based on three-phase current source converter[C]//2015 5th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, November 26-29, 2015, Changsha, China. 2015:1240-1245. [16] 楊嘉伟.电压源型变换器在电力系统中的若干应用[D].武汉:华中科技大学,2013. [17] CHEN Zhu,MAO C,WANG Dan,et al.Design and implementation of voltage source converter excitation system to improve power system stability[J].IEEE Transactions on Industry Applications,2016,52(4):2779. [18] 毛承雄,何金平,王丹,等.全控器件励磁系统的多变量反馈线性化控制[J].中国电机工程学报,2013,33(22):54. MAO Chengxiong,HE Jinping,WANG Dan,et al.Multivariable feedback linearization sheme for new excitation systems based on full controlled devices[J].Proceedings of the CSEE,2013,33(22):54. [19] 张崇巍,张兴. PWM整流器及其控制[M]. 北京:机械工业出版社,2003. [20] 杨亚飞. 约束优化问题的粒子群算法方法[D]. 北京:中国地质大学,2012. (编辑:邱赫男) 收稿日期: 2019-04-02 基金项目:国网浙江省电力有限公司科技项目(5211DS17001A);国家重点研发计划(2017YFB0903604) 作者简介:吴跨宇(1979—),男,硕士,高级工程师,研究方向为发电机励磁系统、网源协调和电力系统分析; 张甜甜(1995—),女,博士研究生,研究方向为发电机励磁系统和电力系统分析; 张建承(1988—),男,博士,研究方向为发电机励磁系统和电力系统分析; 余明浩(1995—),男,硕士研究生,研究方向为发电机励磁系统控制和电力系统分析; 毛承雄(1964—),男,博士,教授,研究方向为发电机励磁系统控制、电力系统分析和大功率电力电子器件在电力系统中的应用; 熊鸿韬(1984—),男,碩士,高级工程师,研究方向为发电机励磁系统控制和网源协调; 王 丹(1977—),男,博士,教授,研究方向为发电机励磁系统控制和大功率电力电子器件在电力系统中的应用。 通信作者:张甜甜