高压变频器同步电机无传感器飞车起动的方法及应用
2020-09-24陈江洪
陈江洪,王 旭
(上海电气富士电机电气技术有限公司,上海 201199)
0 引言
随着电气传动技术尤其是变频调速技术的发展,作为大容量传动的高压变频调速技术也得到了广泛的应用。多电平串联H桥逆变拓扑是国内大部分高压变频器厂商采用的主流拓扑结构。该变频器有很多独有的特征:模块化结构,易于降低成本和便于维修;几乎正弦的输出波形;旁路功能提高了系统的可靠性;网侧电流接近正弦[1]。
2017年,中国经济企稳回升,产业升级、结构优化初见成效,中高压通用变频器市场呈现正增长态势,同比增长8.5%,呈现自2012年以来首次正增长态势。其中市政水利行业作为中高压变频器第二大应用行业,水生产和供应的固定投资增速明显,水工业行业中高压变频器业绩呈现较明显增幅。该行业对其设备运行的稳定性、效率和功率因素等都提出了更高的要求,传统的V/F控制已很难满足要求。因此,通过高压变频器采用矢量技术控制同步电机,自动调节励磁电流,大幅提高转速的控制精度和响应时间,实现长时间高效的不间断工作,成为越来越多用户的首选方案。
在水工业行业的泵类应用领域中,通常会采用一台或多台高压变频器顺序驱动多台泵的工作方式。当泵依次起动时,需要变频器具有变频切工频,即“同步投入”功能。当某台工频运转的泵需要进行出水量调节时,即从工频切变频,这就需要变频器具有“飞车起动”功能。“飞车起动”是指当电动机转子旋转时,将变频器输出一定大小、一定频率的电压加到电动机上起动的过程。如果电动机的反电动势与变频器输出电压不同步的话,较大的冲击电流将流过变频器,使得变频器主回路器件有烧坏的风险。如何调节变频器输出使之和电动机反电动势同步,消除冲击电流是“飞车起动”的关键技术。而且对于没有配置速度传感器的电机来说,其转子的实际相位更加难以获取,故高压变频器必须采用无传感器矢量控制才能满足要求。
1 同步电机无传感器飞车起动的风险
1.1 电机失磁风险
同步电动机拖动水泵时,同步电机脱离电网,转由高压变频器驱动控制,开始飞车起动。电机的励磁柜转为变频器控制。在励磁转换过程中,需要控制同步电机的失磁风险。所谓失磁,就是电机转子失去直流励磁电流,使转子磁场消失,这种状态即为失磁状态[2]。失磁时,转子绕组开路,会产生较大的感应电压,容易发生匝间短路、绝缘破坏等故障。同时转子磁场突然衰减,电机将失步运行。虽然电机脱离电网,但定子磁场并不会消失,此时阻尼绕组会产生较大电流,引起阻尼绕组过热损坏。
1.2 转速推定偏差风险
当高压变频器采用一拖多方式驱动电机时,如果选择使用速度传感器,其安装及切换都比较复杂,同时也增加了用户的成本。如果不使用速度传感器,则对电机自由运行时转速推定的精度有很高的要求,因此要求变频器具有无传感器矢量控制功能。由电机原理可知,当向电机定子施加交流电压时,如果定子旋转磁场速度远大于电机转子的实际速度,电机定子电流会极速上升,可能达到额定电流的5~7倍,引发变频器过流故障;如果定子旋转磁场速度小于电机转子的实际速度,此时电机为发电状态,将反向给变频器充电,引发变频器过压故障。转速推定偏差较大时,极端情况下还会损坏变频器的主回路器件,引发更严重的后果。
2 同步电机飞车起动控制的关键方法
2.1 电机励磁控制
在电机脱离电网后,首先进行励磁控制由DCS到变频器控制的转换,然后变频器输出励磁控制指令。变频器控制电机励磁电流后,变频器输出断路器才能合闸,开始电机转子速度推定。等待推定电机转子转速完成后,变频器输出交流电压,开始驱动电机,实现电机从工频到变频的切换,飞车起动过程结束。整个转换过程都要保持励磁电流的稳定,防止出现失磁状态,其控制时序如图1所示。

图1 同步电机飞车起动时序图
2.2 同步电机旋转方向判定
变频器读取输出电压,进行Clark变换,获得静态坐标系下电压Vα和Vβ,根据其电压的极性来判定电机的转子旋转方向。当Vβ由正变负,下降沿时,如果Vα为正,则电机顺时针旋转;当Vβ由负变正,上升沿时,如果Vα为负,则电机顺时针旋转。判定方法及时序如图2~图3所示。
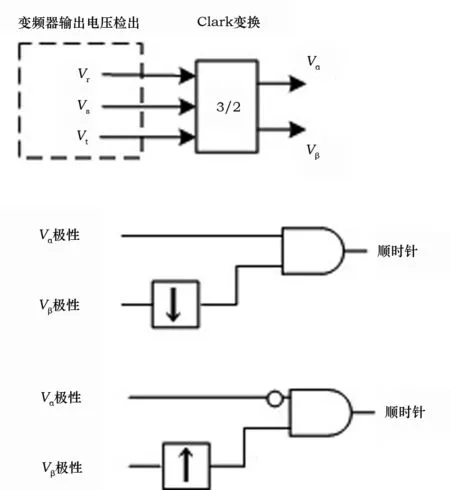
图2 同步电机旋转方向判定
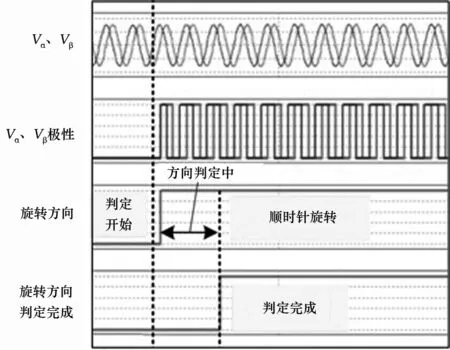
图3 同步电机旋转方向判定时序图
2.3 同步电机速度推定
电机旋转方向判定完成条件成立后,才能继续进行速度推定。由于本项目中电机没有配置转速传感器,其转子速度难以直接准确地获知。因此必须进行速度推定。一般来说,常用的速度推定方法如下:
(1) 检测电机的输入电压,通过调整电压的励磁分量来推定电机转子转速。
(2) 文献[3]根据输出电压推定电机的反电动势,再利用反电动势与频率间的关系来推算电机转速。但电机反电动势估算转速对电机参数比较敏感,需要有较高精度的在线参数辨识方法。
(3) 根据定子电流幅值来搜索电机转子频率的控制策略[4]。在飞车起动时,电机转速存在不确定性,对变频器输出断路器合闸时的输出频率有较高的要求,可能出现较大的突入电流。
(4) 文献[5]通过在电机输入端子处施加一个确定的电压,根据输出电流检出值估算电机转速。本项目中要求电机脱离电网后,马上进行飞车起动,转为变频驱动。但是电机转速因负载等原因下降的情况无法确认。如果电压施加的不合适,可能出现过大的冲击电流,引发过流故障。
方法(1)在高转速条件下的算法鲁棒性较好。在飞车起动过程中,变频器连接自由运行的电机后,首先读取电机电压参数,进行Clark变换后,得到静态坐标系下的Vα和Vβ。然后根据预推定转子位置角θ,进行Park变换,获取励磁电压分量Vm。然后通过一个PI调节器进行自动调整,修正变频器的输出,当输出Vm接近0时,即可认推定速度与电机转子实际速度一致,速度推定结束。转子的位置角θ则由转速持续积分得到。
本项目在进行飞车起动时,电机刚从电网脱离,电机转子处于高速阶段。高压变频器的输出断路器合闸后,变频器输出连接电机的电源输入端,必须防止电机反向对高压变频器充电,减少功率单元内部母线电压的升高,避免出现过压故障。因此需要尽可能快速完成电机转子转速的推定。
在电机高速运行时,该方法具有良好的动态性能。速度推定框图如图4所示。
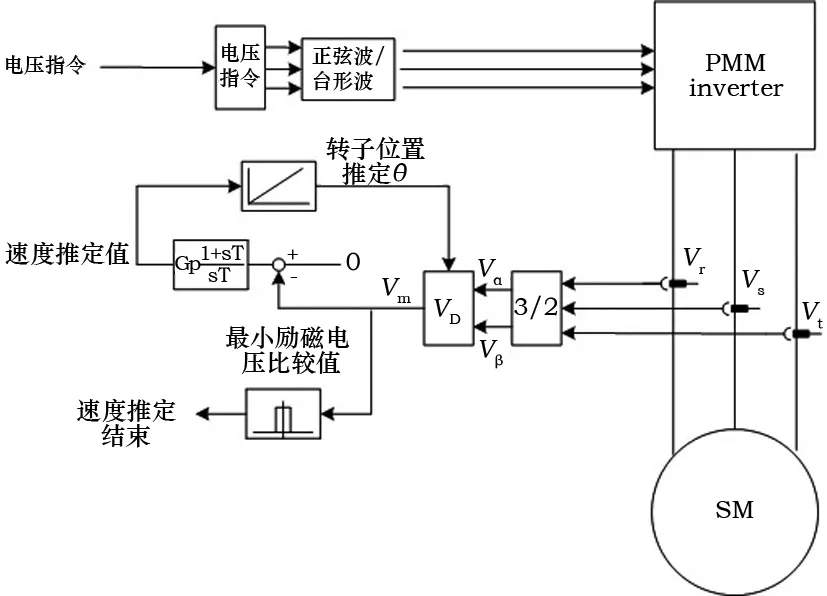
图4 速度推定框图
3 同步电机飞车起动的项目应用
某水利闸站的排涝工程有5台同步电动机拖动5台排水泵。设置两套变频器可在5台泵组之间分别完成互相切换的功能。具体对应的变频切换措施如下:#1变频器在M1、M3、M4电机之间进行切换;#2变频器在M2、M5电机之间进行切换。其电气原理图如图5~图6所示。
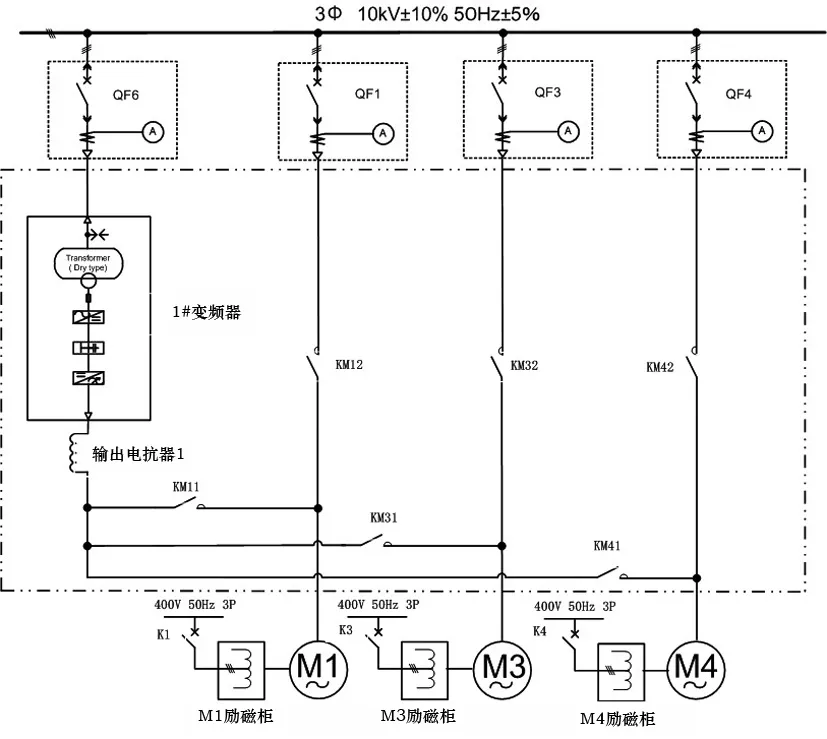
图5 #1变频器一拖三电气原理图
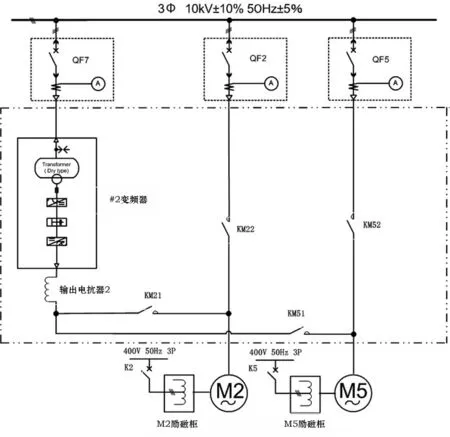
图6 #2变频器一拖二电气原理图
变频器的工作控制逻辑以#1变频器为例,如下:
(1) 变频器根据上位DCS要求,控制M1励磁柜输出励磁电流,并判定电机转子位置。
(2) 变频器采用无传感器矢量控制方式,逐步加大电流和电压,同时调整励磁输出,将M1电机加速到工频转速。
(3) 变频器进入同步投入模式,控制输出电压与电网同步,满足条件后,QF1、KM12自动合闸,KM11自动断开,励磁柜脱离变频器的控制。M1泵切换至工频运行。
(4) 变频器重复(1)~(4),依次将M3、M4泵切换至工频运行。
(5) 上位PCS检测到总排水量过大,或者有水泵出现震动时,以M1为例,先断开QF1、KM12。
(6) 励磁柜改为由变频器控制,变频器输出励磁信号后,再闭合KM11。
(7) 变频器进入飞车起动模式,判定M1电机的旋转方向,并推定其实际旋转速度。
(8) 变频器完成M1电机的速度推定后,开始输出电压和电流,驱动电机进入变频控制运行状态。
(9) 变频器根据上位DCS的要求,将水泵调整到要求的转速。
为了验证同步电机无传感器矢量控制飞车起动的方法的有效性,在该项目投入运行前,进行了实机验证。整个飞车起动过程中,励磁电流、电机电压的波动都比较小,没有引发电机过流和单元过压故障,证明该飞车起动控制方法是有效的。
4 结语
水生产和供应的固定资产投资连续5年高速增长,从而带来该行业应用对高压变频器的需求也同步增加。某水利闸站使用了同步电机无传感器飞车起动功能,设备运行安全可靠,也取得了部分节能的效果。该项目具有可复制性,在类似应用中可广泛推广,为市政建设提供了更好的服务。
