基于ADAMS 和Solidworks 软件对码垛机器人运动响应特性分析
2020-09-11吉林农业科技学院唐海亮张强魏占胜王炟
吉林农业科技学院 唐海亮 张强 魏占胜 王炟
中国2025 智能时代,各行各业都充斥着改革的气息,尤其引人注目的便是集众多前沿科技于一身的现代化制造业装备——工业机器人。世界各国纷纷抓住历史机遇,出台了“再工业化”战略、“工业4.0”计划、“2020 增长战略”推动机器人技术快速发展。在制造业上广泛应用机器人,做到“机器换人,人用机器”的新型制造自动化。
码垛机器人占地面积小、运动空间大、灵活精准、快速高效、稳定性强、安全系数高,凭借着这些优势在很多领域占有一席之地,大大节省了劳动力。由于我国机器人起步较晚,在码垛机器人的基础科学研究短板突出。通过建立虚拟样机并进行运动仿真得到运动仿真数据,从而达到优化原型样机的目的。解决当前制造业产能过剩、大量关键设备、核心技术受制于人的问题,期望突破码垛机器人方面研究的短板。
1 10kg 码垛机器人研究主要内容
结合在校期间Fanuc 系统工业机器人实习,我们提出码垛机器人对10kg 载荷的搬运及码垛设计。利用Solidworks 建立10kg 码垛机器人原型样机,对机器人进行运动学分析并对原型样机转速能否快速增加从而实现码垛机器人带动负载的承载力验证。
2 10kg 码垛机器人结构设计
2.1 码垛机器人总体结构设计
码垛机器人可用于自动化工厂生产流水线上代替人工重复劳动、提高工作效率,增加人口红利。它主要用于抓取货物并按照码垛形状给出既定的姿态将货物重复精准地放在指定位置。码垛机器人可以高速运行且工作范围大,为了避免码垛机器人在搬运过程中与货物发生碰撞,搬运货物从货物多方面进行夹取并安全摆放,所以选择垂直多关节机器人,本质是一个仿生手臂空间自由度开链式机构。主要由机械臂、驱动装置、传动装置、内部传感器组成。
当前国内一般码垛机器人重复定位精度低、承载载荷小,所以结合校园fanuc 系统研究上料搬运机器人,研究设计10kg 码垛机器人。选用交流伺服电机易于CPU 连接、响应快、定位精度高、控制性能好,腕部采用十字纽扣RBR 型减小纵身长度,增大结构力矩,总体结构如图1。
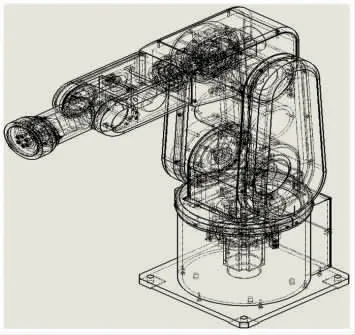
图1 10kg 码垛机器人总体结构
2.2 10kg 码垛机器人腰部应力分析
对腰部进行有限元分析,分析它的承载载荷腰部所受的应力,然后判断结构是否能够承载10kg 负载,应力分析如图2。
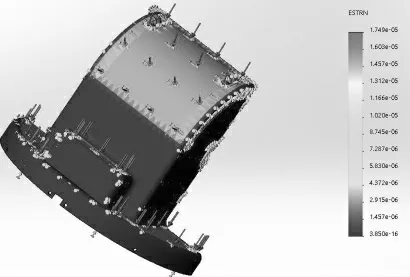
图2 应力分析
3 10kg 码垛机器人运动学响应分析
将原型样机在Solidworks 进行特征组合,首先省略一些无关零件,避免在做运动仿真时图形干涉报错。然后将处理之后的原型样机导入ADAMS 建立虚拟样机并进行运动仿真。给码垛机器人设定负载10kg,运转时得出关节受力曲线、关节转速。随时间变化曲线如图3、图4 所示.
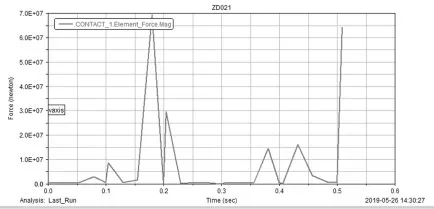
图3 码垛机器人Z 轴受力曲线
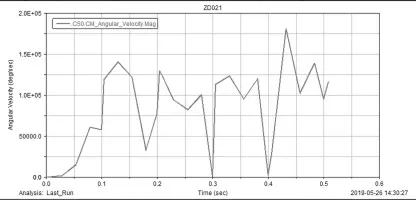
图4 码垛机器人转速随时间变化曲线
4 结语
由图3、图4 曲线分析可知该设计的码垛机器人是可以承受10kg 的负载并平稳运转的。启动的0.2s 码垛机器人的承载力逐渐增大,转速也快速增加,从而实现码垛机器人带动负载的承载力。
