基于虚拟定标线的巡检机器人视觉导航设计研究
2020-09-10张初宏

摘要:巡检机器人视觉导航系统的应用,可实现自由转向并可显著提升导航效率。本文设计出了一种基于虚拟定标线技术的巡检机器人视觉导航系统,旨在通过改变巡检形式来提升巡检成效,并最终在时代发展需求中,持续服务导航提供工作。
关键词:虚拟定标线;巡检机器人;视觉导航;设计
0 引言
巡檢机器人视觉导航系统以智能化设计为目标,与时代相称并在设计方法上渗透现代化技术;在视觉导航上做出严肃处理,并在后续工作运维中,达到预设目标。机器视觉(Machine Vision)即以巡检机器人视觉导航作为人工智能领域中发展迅速的一个重要分支,不断突破、走向成熟。机器视觉“是通过光学装置和非接触传感器自动地接受和处理一个真实场景的图像,通过分析图像获得所需信息或用于控制机器运动的装置”,证实基于虚拟定标线技术涉及的智能图像处理技术在机器视觉中占有举足轻重的位置。相关设计细则分析如下:
1 设计所涉技术概述
以设计环节虚拟定标线技术的应用为例,通过融合计算机虚拟技术来作为本次巡检机器人的重要科学技术形式之一,为巡检机器人视觉导航系统寻求CPU、内存、磁盘空间等组合资源支持的操作环境,以便于在资源配置上更具优势。
控制巡检机器人虚拟定标线技术的运用,是沿着导航线移动的关键技术,是机器人对导航线方位和距离精准定位的过程;虚拟定标线以现代图像处理的优势,在检测到信号与导航线与相应位置融合中实现极速化控制,利用模糊控制策略,对机器人沿着导航线的行走进行控制,降低机器人运作环节与实际偏离角度和距离等较大问题。
2 结构设计和功能
巡检机器人视觉导航自动化的发展,使得远程监控机械电气设备型号、监控数据信息采集及其绝缘监测等成为了可能。在实际运用中,对降低运维工作数量,演唱巡视检修工作中后期等具有重要的意义。基于虚拟定标线的巡检机器人视觉导航结构设计旨在满足预设工作效果,充分发挥设计作用优选及其功能优势,最终与巡检工作实践中,相应的以战略性、科学化、合理化方法,满足当前工作良性需求。
结构设计中,通过合理创建子系统来实现自由运动,直接与主板结构(AT、Baby-AT、ATX、Micro ATX、LPX、NLX、Flex ATX、EATX、WATX以及BTX等)、PMAC2A-104运动控制卡一道,连同电机设备驱动器等内容,对方便机器人实际巡检,严格控制运动和行为起效良好。以光伏电站巡检清洁无人机为例,具体设计结构如图1所示。
基于上述结构设计要诀中包括信息数据收集、诸多技术方式采用、临床巡检路径开辟等,均需在系统实时化场景寻求数据建模及其集合的融通路径。设计对局进行局部整合、规划搜集、渗透力学控制、算法、承受速度等管理控制中,使得设计效果于设计质量得到全面提升。
3 设计路径
3.1 设计目标
为进一步提高巡检工作效率及适用范围,设计出个性自动巡检系统,需从基本初级自动巡检着手,配合PCA、神经网络算法等进行测试,力图达到开发应用效果。主要设计目标:自主规划实现,即方向控制、障碍物识别与规避等;弥补以往巡检中的人力消耗过大问题,解决紧急情况巡检员人工操作控制能力和技术水平不足的缺憾。
3.2 设计特征
机器人智能巡检系统以网络分布式三层构架为框架,包括基站层、通讯层和终端层。发挥在任意巡检检查工作设定时间任意任务完成的功能;日常巡检中的可见光摄像头、红外测温、自主和遥控巡检、图像遥传功能、自动停障、机器运转本身状态信息采集及分析功能、巡检系统历史事件查询、各巡检设备数据分析和报表制作、智能报警等诸多功能;基于红外专家库的设备红外图片手动分析功能;最优路径规划功能;对讲与喊话功能;具备微气象信息采集系统。
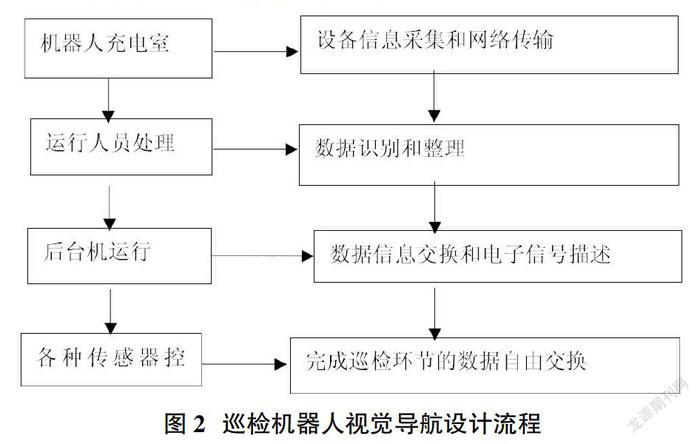
3.3 结构设计流程
具体结构设计流程如图2所示。
3.4 调试检测
主要内容包括巡视一次设备巡检系统通道确立,二次设备巡检实现困难。红外测温系统因环境因素如高杆灯、月光等造成误差。通过适当调节标签点的位置和坐台的转向来进行规避。对六氟化硫泄漏情况及位置判断中,增设可检测远距离的六氟化硫检漏仪等加以调试。
3.5 核心硬件
系统所用硬件核心,包括舵机机器人的硬件组装、PID控制算法的分析、控制程序的编写、运动过程的分析等过程。其中算法设计中,就循迹部分读取灰度传感器数值、前进后退算法、循迹算法及其编码器等核心硬件,来达到视觉控制效果。
3.6 设计路径选择
视觉导航设计轨线类型的选择,设计机器人预先行走路线、保证设备可以按照线路轨迹持续运动。为机器人运作营设较为良好的路面环境,并不受其他控制。
视觉处理设计上,视频采集系统与技术的合理使用,视觉导航系统设计在车体前部,并与当地实际状况与设计特点、要求等控制位置相吻合。系统设计构件选择与各种模块综合组建和处理相互匹配,在各个模块上对视觉导航系统设计功能、目标力、协调控制力、预设工作效果水平中发挥了明显的处理优势。
图像处理层面,设计出的机器人包括载物台底部所设行走机构、重量感应机构、货物固定机构、支撑台(内部容纳腔、腔内固定安装控制器和主处理器),支撑台两侧对称抓取机构并与之铰接,支撑台顶端设有支撑杆,支撑杆顶端设有图像采集机构,底端通过带座轴承并与支撑台活动连接;/n图像采集机构包括CCD相机(3),CCD相机、支撑杆的顶端固定连接,支撑杆(4)上固定连接第一从动齿轮,顶端靠近支撑杆位置设有第一驱动电机,第一驱动电机输出轴固定连接第一主动齿轮,第一主动齿轮……
4 设计可行性报告
计算机视觉它本身的也是一个很基础的学科,可以跟各个学科做交叉,同时内部还细化到机器视觉、图像处理、人工智能、大数据、云计算和物联网等内容。多智时代专注于人工智能和大数据的入门和科谱基于虚拟定标线的巡检机器人视觉导航设计,在系统运行期间,要处理好巡检环节的图像问题,必须熟悉设计算法,并应用matlab软件、仿真图像算法案例。深入学习C++等开发程序和基于类开发、虚函数,类的继承、多态、命名空间、文件的输入输出、模板STL等。使用opencv这个开源库对图像进行处理,实现了算法和代码结合,将MFC和opencv结合,更能设计出符合导航现实设计需求的智能巡检机器人。
5 结束语
在智能巡检机器人视觉导航系统设计实践中,引入虚拟定标线作为设计主线的巡检实践中,通过设计方法优选、系统化结构设计内核及其相关设计优势发挥,直接程度上对满足巡检工作技术要求呢、优化工作机制具有极大的可行性。
参考文献:
[1]左锦,倪金鑫,陈章宝.视觉导航草坪修剪机器人控制系统设计[J].工业控制计算机,2020,33(2):81-82.
[2]李佺振,王强,曾勇,等.基于人脸识别与光流追踪的移动机器人视觉导航方法[J].自动化与仪表,2020,35(1):23-27,65.
[3]周锡恩,吴镇江,卢偲帆,等.基于视觉检测与自主导航的轮式机器人平台[J].信息技术,2019(10):55-58.
[4]成怡,佟晓宇,朱伟康.改进ORB的轮式机器人视觉导航算法[J].天津工业大学学报,2019,38(5):58-63.
[5]庞磊,曹志强,喻俊志.基于视觉的行人引领移动机器人导航方法研究[J].导航定位与授时,2019,6(4):26-32.
作者简介:张初宏(1980-),男,福建人,机电一体化工程师,本科,研究方向为机电一体化。
