一种悬浮控制参数适应线路调整的方法
2020-09-10赖重平刘庆梁洪徐中来
赖重平 刘庆 梁洪 徐中来


摘 要:磁浮车辆正式上线前必须经过悬浮系统调试,本文提出一种磁浮列车悬浮控制参数适应不同线路调整的方法,针对不同线路段采用不同参数或模型,简单、可靠、适用。通过情况下因为存在车轨耦合,每列车为了适应轨道都必须调试。一般情况要经过静载试验,之后经过道岔、曲线段等试验,并按要求以不同速度、不同载荷运行,调试达到满足试验要求。只有通过这些试验,才通保证载客情况下正常运营。
关键词:悬浮控制参数;线路;调整
中图分类号:U292.917 文献标识码:A
0 引言
磁浮列车的轨道采用等间隔支撑细长梁作为导轨,导轨的弹性引起车轨耦合[1,2]。针对各种车轨耦合工况及曲线段,各种论文研究过很多算法来提高轨道性能,但具体在工程应用中,考虑到经济性、应用性、可靠性,有时难以取得良好的工程效果。例如将轨道有关参数限制高一些,阻尼和刚度满足某一条件,会提高轨道造价,在工程上难以推广应用。而采用各种复杂悬浮控制算法,因为考虑车轨耦合的悬浮控制系统是五阶系统,系统复杂,现有芯片编程未必能良好实现,很多算法处于实验室或理论仿真阶段。
1 悬浮試验及判断标准[3]
悬浮系统试验基本分为静载试验和动载试验等。试验时,悬浮控制器的控制单元将该点位的间隙、电流等值上传到上位机进行显示。上位机是装有调试软件的电脑,可以将间隙、电流等量进行显示、保存、分析。
1.1 悬浮试验方法
(1)静载试验。静载试验应在列车最大载荷(AW3)下进行,应连续起浮/落下5次。每次当全车起浮完成后持续30 s再下达落下命令,待悬浮系统完全降落后,间隔30 s再执行下次起浮操作。
(2)动载试验。动载试验宜在平直轨道段进行。在AW0、AW2、AW3载荷工况下,列车分别以35 km/h、60 km/h和最高运行速度运行,观察上位机显示的数值,记录每个悬浮点的间隙、电流等值。
(3)道岔通过试验。在AW0、AW3载荷工况下,列车以10 km/h速度通过支线道岔路段,观察上位机显示的数值,记录每个悬浮点的间隙、电流等值。
(4)曲线通过试验。在AW0、AW3载荷工况下,列车以规定速度通过110 m半径曲线路段,观察上位机显示的数值,记录每个悬浮点的间隙、电流等值。
在AW3载荷工况下,将列车降落在R110 m半径曲线中央,20 s后列车起浮运行,目测起浮动作,观察上位机显示数值,记录悬浮控制系统状态和起浮稳定时间。
(5)坡道通过试验。在AW0、AW3载荷工况下,列车以规定速度通过70‰坡道路段,观察上位机显示的数值,记录每个悬浮点的间隙、电流等值。
在AW3载荷工况下,将列车降落在70‰坡道上,20 s后列车起浮运行,目测起浮动作,观察上位机显示数值,记录悬浮控制系统状态和起浮稳定时间。
1.2 判断标准
悬浮控制系统运行正常,无故障显示;所有悬浮间隙变化值均在允许范围(静态间隙8.5±0.2 mm,动态间隙8.5±4 mm);列车起浮正常(起浮稳定时间8 s),且列车浮起后能前后运动。
2 本文实现方法
根据磁浮列车实际工程调试经验,本论文提出一种可靠、适用的方法。将线路分为平直道、库房、道岔、坡道、弯道、桥梁共六段,如图1所示。平直道是基本的,悬浮控制模型也是基于平直道建立的,所以设计、调试时从平直道开始。库房及道岔主要由于轨道梁刚度、阻尼不同,所要采用不同参数。坡道可分为圆曲线段、坡道段、圆曲线段,在这三个段系统模型是不一样的。弯道,因为过弯时电磁铁磁极与轨道相吸磁路的正对面积变小,吸力减小,为了稳定悬浮需要调整参数输出更大电流。桥梁,轨道固有频率与悬浮控制系统频率如果接近易引起共振。因跨度、材料不同,轨道频率不一。轨道在不同固有频率下的动力学模型不一样。
针对各段分别采用不同参数或模型进行控制。利用车载测速、定位装置获得当前磁浮车所在线路的位置,此信号传到列车控制TCMS单元,再由TCMS单元通过CAN网络传到所有悬浮控制器,如图2所示。
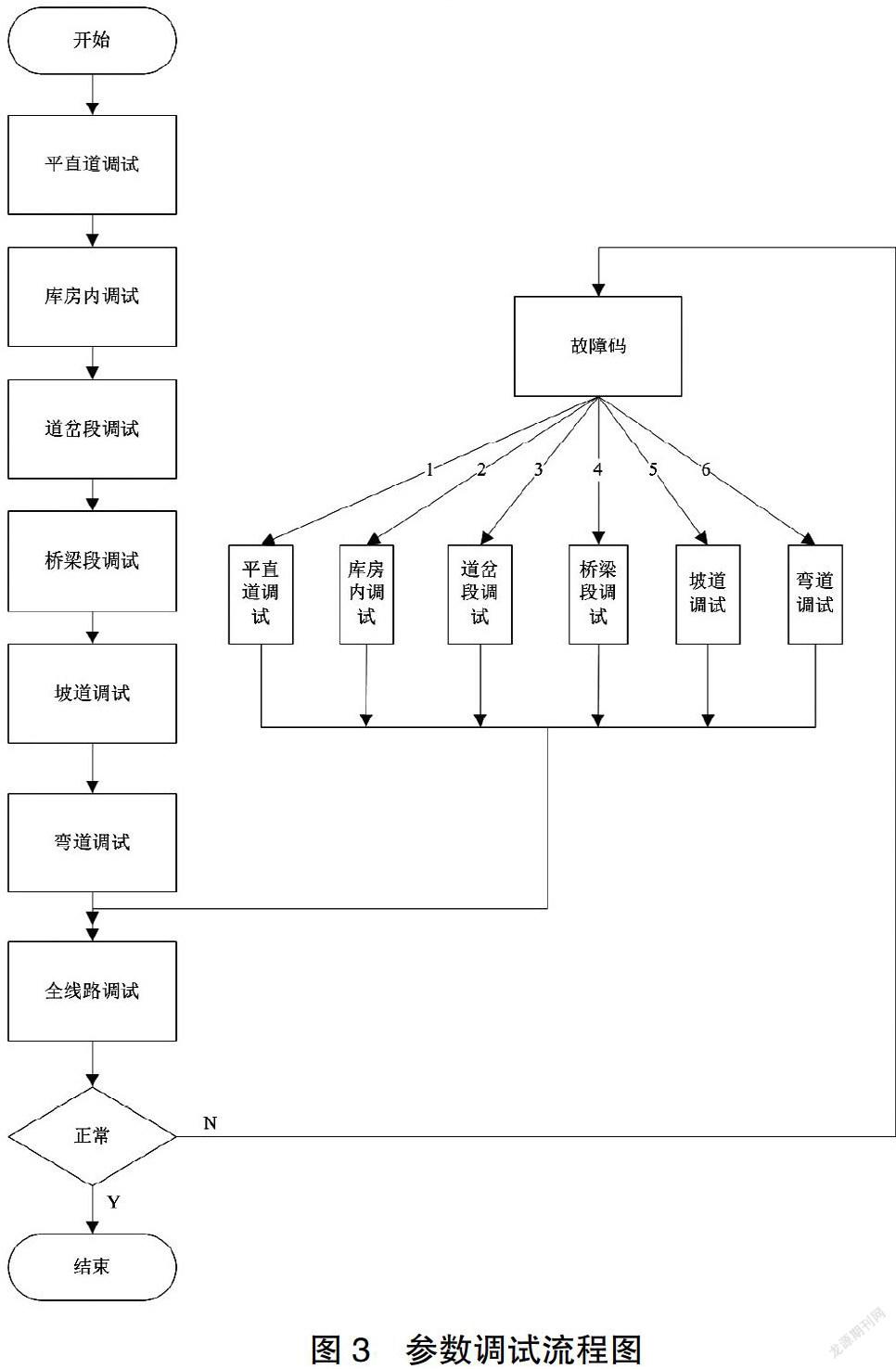
首先进行分段调试,在上述各个段情况下分别调参数或针对曲线段建不同模型进行调试。通过上位机在线监测悬浮状态,观察间隙波动、车轨振动情况等。使间隙波动小、车轨无共振、动态调节时间短、超调量小。分段调试好后进行全线路调试,由车上安装的悬浮监控模块等监测手段对悬浮状态及故障进行监控,如果出现掉点、共振等情况认为不正常,重新调整故障段的参数。调试流程如图3所示。
磁浮车悬浮控制系统调试好后投入正常运行。控制器根据当前磁浮车所在线路位置调用针对不同线路段不同模型及参数对应的程序段进行控制,如图4所示。因为程序段预先存储在芯片内部储存器,现有运算芯片计算速度非常快,不会因切换引起系统不稳定。
同时考虑到随着时间推移,轨道及车辆发生沉降或变形,会引起新的不稳定(掉点或车轨共振),所以磁浮车装了悬浮监控模块,持续进行监测。一旦发生悬浮故障会将故障信息存储在悬浮监控模块内,磁浮车停运后可下载数据进行分析。针对多次出现的故障,找出故障发生的线路位置并分析原因,重新调试该线路段程序段参数。
3 结语
磁浮列车的悬浮控制系统调试非常重要,本文提出将线路分为平直道、库房、道岔、坡道、弯道、桥梁,分段调试通过,再全线调试。要反复多次直到满足要求。并且空载和加载时、不同速度时稳定情况都可能不同,在这些不同工况下,反复应用本文方法,反复调试直到把系统调试到稳定。
参考文献:
[1]刘恒坤,常文森,施晓红.磁悬浮系统车轨耦合振动研究[J].计算机仿真,2006,23(09):256-258+267.
[2]鲍佳,张昆仑.单磁铁电磁悬浮系统研究[J].计算机测量与控制,2003,11(11):863-865+869.
[3]CJ/T 458-2014,中低速磁浮交通车辆悬浮控制系统技术条件[S].
