既有CTCS-2高速铁路实现自动驾驶关键技术研究
2020-09-04易海旺何镭强唐明亮
易海旺,汪 洋,何镭强,唐明亮,唐 峻
(1.中国铁道科学研究院集团有限公司通信信号研究所,北京 100081; 2.国家铁路智能运输系统工程技术研究中心,北京 100081; 3.北京华铁信息技术有限公司,北京 100081)
针对大城市人口稠密,城市都市圈交通问题严峻,城市间人口流动频繁等现状,迫切需要建设高效率、高密度的城际铁路交通系统;逐步形成城市间发展高速城际铁路系统,多种轨道交通类型并存的现代城市轨道交通新格局。
在列车自动防护系统(ATP,Automatic Train Protection)确保列车运行安全的条件下,提高列车运行准点和舒适度,缩短列车追踪间隔时间,将列车运行智能控制纳入交通运输管理体系,逐步提高铁路运输能力和旅客乘车体验,其关键是实现列车运行的自动驾驶。列车自动驾驶(ATO,Automatic Train Operation)综合智能控制技术、计算机仿真技术、无线通信技术和软件工程技术等,建立自学习控制模型,优化列车速度控制算法,进而实现列车运行智能控制。
采用先进的列车自动驾驶技术,可以大大提高行车效率、安全性。随着列车自动驾驶ATO设备逐步发展,列车运行控制将形成为“机控优先,人控后备”的格局[1]。列车自动驾驶系统在珠三角城际铁路CTCS2+ATO线路中得到广泛应用,它降低了司机的疲劳程度,有效实现节能控制,提高了旅客乘坐舒适性和列车运行准点率。
1 技术路线
在既有CTCS-2列车控制系统基础上,重点突破自动驾驶关键技术难题,并基于国家铁路智能运输系统工程技术研究中心实验室,搭建了硬件半实物仿真测试环境,进行系统级联调、集成测试及试验验证,最后,依靠莞惠城际铁路试验段进行现场功能测试和互联互通测试。其研究技术路线如图1所示。

图1 技术路线
2 技术方案
依据《城际铁路CTCS2+ATO列控系统暂行总体技术方案》[2],既有CTCS-2级高速铁路列控系统(ATO)车载设备由ATP设备(列车自动防护系统)与ATO设备(列车自动驾驶系统)2个部分构成,车载ATP设备符合《CTCS-2级列控车载设备技术规范》[2]的要求,车载ATO设备系统结构如图2所示。
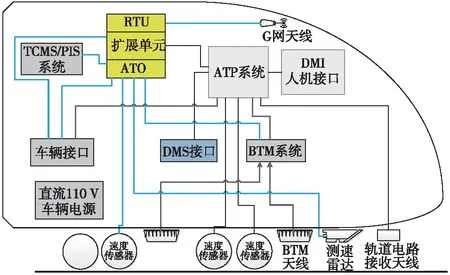
图2 车载ATO系统设备结构
2.1 ATP设备
ATP设备由安全计算机(VC)、轨道电路信息接收单元(TCR)、应答器信息接收模块(BTM)、数据记录单元(DRU)、人机界面(DMI)、列车接口单元(TIU)及测速测距单元(CODO)等组成[3]。为实现ATO功能,车载ATP设备须在原有功能基础上进行以下修改。
(1)车载ATP主机软件适应性修改
为满足城际铁路运行条件,车载ATP软件须进行相应软件变更修改,主要内容包含:休眠模式、机信模式、自动折返、停车停稳、自动过分相、车门-安全门联动,无线通信管理、ATO相关数据记录和分析等逻辑功能,以及与扩展单元的接口通信、新型动车组列车参数调整等软件新增功能。
(2)车载DMI设备软件适应性修改
参考《城际铁路列控系统人机界面显示规范(暂行)》,进行DMI设备软件变更,主要新增涉及ATO的运行状态、停稳停准、门允许、车地通信状态、新增文本等显示信息。
2.2 ATO设备
车载ATO设备采用双机热备冗余结构,车载ATO设备通过接收ATP的移动授权数据,控制列车在ATP的允许速度下运行,根据站台精确定位应答器的信息,控制列车精确停车;结合门模式/门允许的条件下,实现自动开关门。按照CTC发送的列车运行计划信息,实现区间运行时间自动调整和车站停车。根据折返命令时,执行站后折返控制。向TCMS转发车站预报相关数据,实现PIS系统的自动报站功能。
(1)双机热备冗余
车载ATO热备冗余切换单元置于接口单元内,实现两系输出的切换。ATO系统两系周期自检,交换状态并同步数据,通过切换板实现热备冗余切换。
(2)列车自动驾驶及精确停车
车载ATO系统在ATP的允许速度下,根据CTC的运行计划实现区间运行等级调整、车站通过或站台精确停车功能。
(3)实时运行等级调整功能
ATO根据CTC发送的区间运行时间,结合列车当前位置、速度,以及运行区间的土建限速、临时限速、坡度等数据,实时计算运行区间等级,以满足准点到达的要求。
3 ATO系统关键技术研究
3.1 车载ATO系统架构
车载ATO系统两系安装于同一机笼内,采用独立的电源及背板设计,每一系由CPU板、串口通信板、以太网板以及IO板组成,各板卡间由CPCI总线控制连接。两系控制单元间通过以太网连接。ATO接口单元对外的采集和输出均通过继电器实现电气隔离;电源板置于接口单元内,两系采用独立的电源设计。切换板置于接口单元内,实现两系输出的切换。如图3所示。
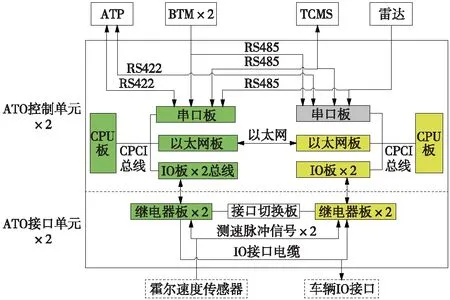
图3 车载ATO系统架构
3.2 ATO速度控制
ATO系统采用标准、开放的系统设计,支持包括电平信号(110VDC)、干接点信号、模拟电压信号、电流环信号、串口通信接口(RS422/RS485)、MVB通信接口等在内的多样化列车接口。ATO依据系统输入,分别计算各限速点或停车点对当前位置的速度的影响值,并取影响最大的值作为当前速度的参考值,控制列车按照该速度曲线运行。ATO速度控制流程如图4所示。
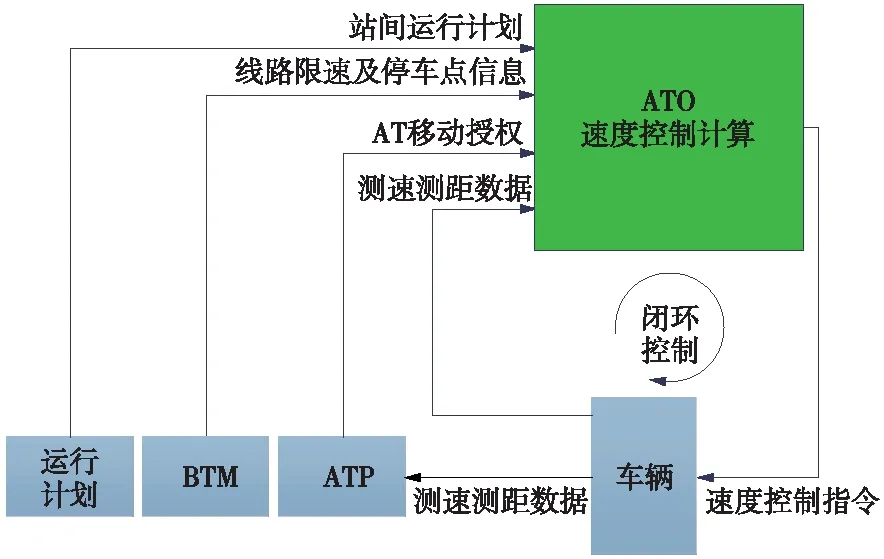
图4 ATO列车速度控制
3.3 ATO控制模型
ATO单元建立ATO自动驾驶模型,列车运动模型通过接收速度传感器的速度信息、应答器信息等,并综合列车能耗模型实现列车运行的舒适度,输出列车控制仿真结果,进而通过与车载ATP的实际速度、目标距离、允许速度等信息进行寻优控制,基于控制策略,对ATO计算结果进行优化处理,并将最终结果反馈到列车运动模型和能耗模块,实现参数自学习自调整功能。ATO列车自动驾驶控制模型如图5所示。
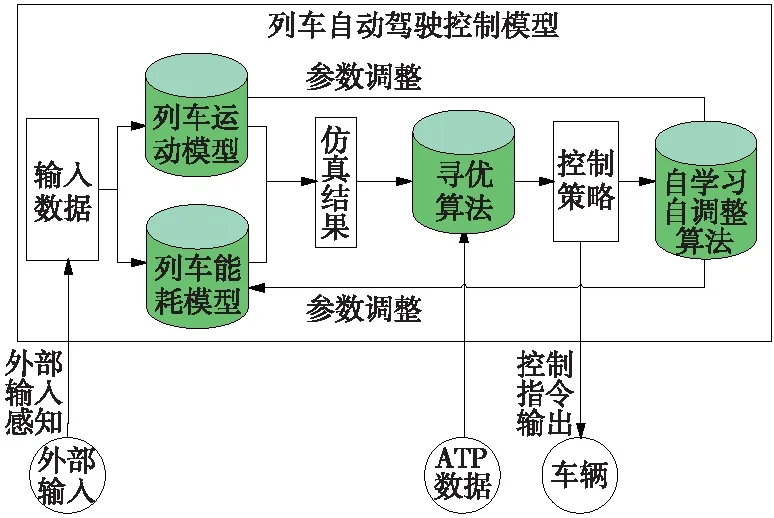
图5 ATO自动驾驶模型
3.4 运行计划实时调整
列车运行计划调整控制作为ATO单元核心模块之一,其主要根据地面设备发送的列车运行时刻(CTC计划),结合列车当前位置、速度,以及运行区间的线路限速、临时限速、坡度等数据,通过ATO系统构建的列车动力模型,以高效的控车算法进行实时计算运行速度,以满足准点到达的要求。为了实现运行等级的实时计算,ATO系统构建了列车动力模型,并以真实的控车算法进行实时运行等级的计算。运行计划实时调整模型如图6所示。
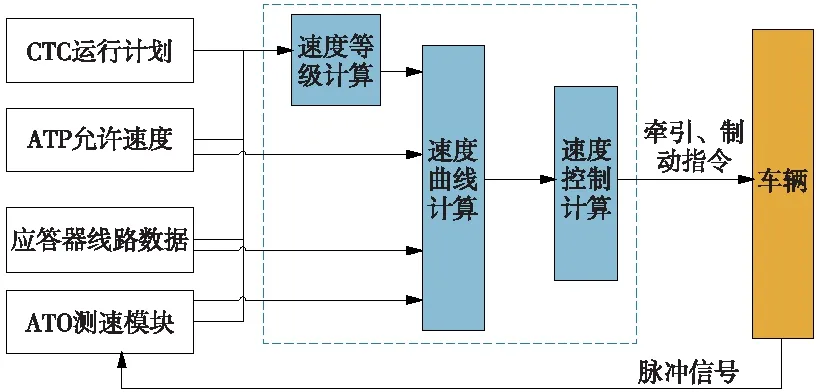
图6 运行计划实时调整模型
3.5 列车定位技术
城际铁路与国铁干线要实现互联互通,就必须兼容CTCS系统。城际铁路自动驾驶系统在此基础上,研究并实现了基于应答器的列车精确定位停车,满足了城际铁路±35 cm的站停误差的要求。
根据规范要求,BTM设备的应答器定位精度在0.998置信区间内的最大定位误差Lerr要求如下:
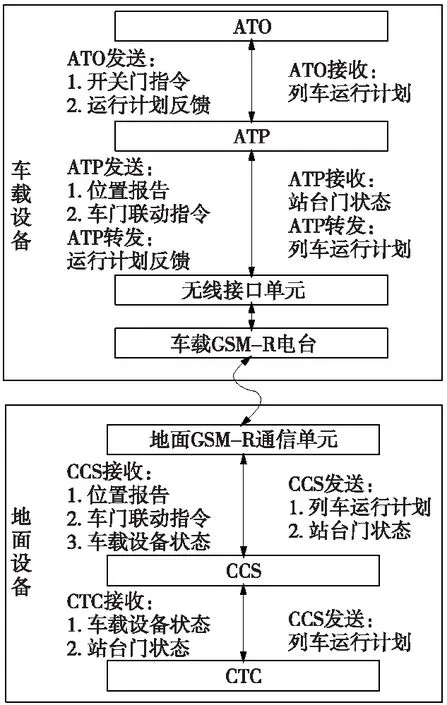
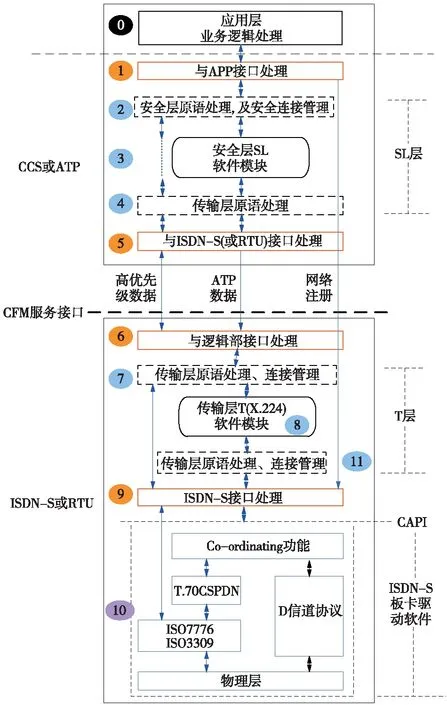
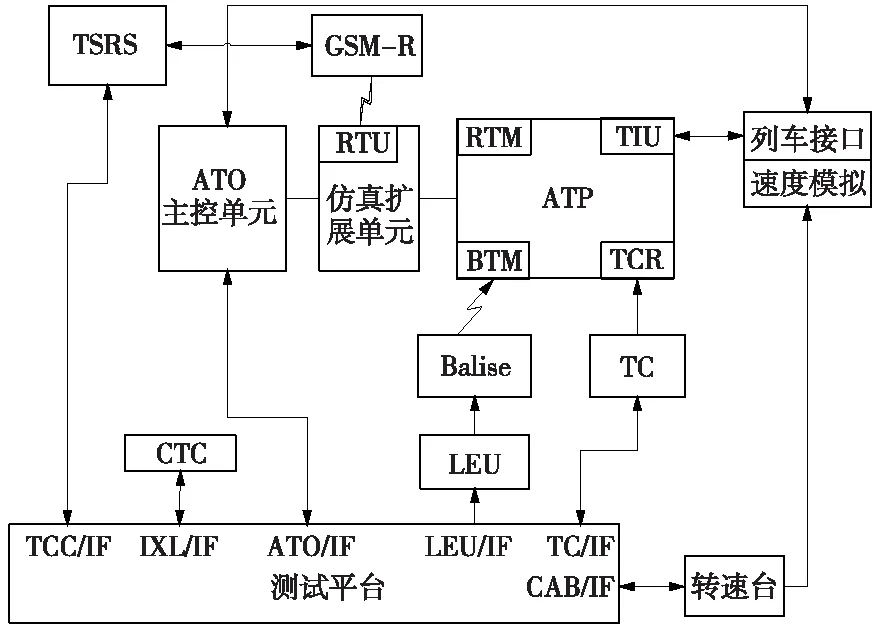
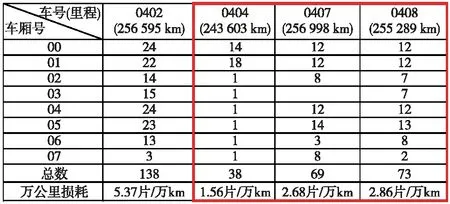
|Lerr|=0.20 m 0 km/h |Lerr|=1.1×10-3V+0.15 m 40 km/h≤V≤500 km/h 为实现站内精确定位停车,地面站内设置定位应答器,应答器布置如图7所示。列车进站后需要BTM提供精确的列车定位信息,实现精确停车功能。为满足精确定位功能需求,BTM设备使用了多种先进的技术,用于提高定位功能的精确度。 (1)通过采用先进的数字解调、模拟滤波和数字滤波技术,有效地滤除外界的干扰信号,提高BTM设备应答器模拟信号的接收可靠性和信号对称性。 (2)结合应答器模拟信号工作特点,设计的同步解调译码算法,已确保BTM实地准确地处理应答器模拟信号,为后级应答器定位运算模块提供了高实时性的定位数据。 (3)通过采用先进的数字处理技术,以及软硬件联合优化,降低BTM的应答器定位运算模块处理时延,确保模块能够在毫秒级的时延内完成应答器定位信息的准确估算,并将定位信息发送至ATP/ATO,从而实现BTM应答器精确定位功能。 图7 定位应答器布置(单位:m) 高速铁路地面新增通信控制服务器CCS,实现站台门控制和运行计划转发。车载设备增加移动终端MT,实现车地信息的双向通信。车载和地面设备采用GSM-R公开网络交换数据,通过加密,以保证数据安全。高速铁路车载无线功能结构如图8所示。 图8 系统结构与边界接口 车地无线通信软件结构及模块划分如图9所示。 图9 车地通信软件结构 (1)安全层对上处理与应用层接口,对下处理与传输层接口。软件模块3仅是安全层的一部分,模块2,3,4共同构成安全层。 (2)传输层设计为与网络层和数据链路层一起在非安全的ISDN-S或RTU上实现,传输层承担CFM的对外接口(主要是对安全层的接口),同时传输层处理对网络层的接口。模块7,8,11共同构成传输层。 (3)安全层和传输层之间要通过传输层原语进行交互,原语的形式和内容是安全层和传输层的核心,而P帧中的帧头和帧尾与服务原语无关,它们由模块5和模块6处理,而原语帧则由模块4和模块7处理。 (4)模块1实现了安全层与应用层的衔接。 (5)模块2,3,4组成了安全层,模块3实现了内部处理,模块2和模块4则完成了和系统的衔接,内部处理逻辑遵守SL层协议相对稳定,而系统结构和需求则易变化,分出模块2和模块4更灵活。 (6)模块7,8,11构成了传输层,模块8使传输层与系统衔接更灵活,模块11完成传输层中与网络层的衔接。 (7)模块9实现了传输层和网络层及链路层的衔接,是否需要模块9,由集成系统本身情况决定。 (8)模块10实现了网络层和链路层。 (9)应用层实现车地信息的交互,交互信息见表1、表2。 表1 车到地消息 表2 地到车消息 车门/站台门联动控制由车载ATO系统自动触发或司机手动触发,车载ATP设备负责车地通信和开关门信息转发,其控制流程如图10所示,具体步骤如下[5]。 图10 车门/屏蔽门的联动控制流程 (1)车载ATP列车停稳且停准时,分别给DMI显示器和ATO系统输出门允许后,司机手动按压开门按钮,或车载ATO系统自动输出开/门关门指令。 (2)车载ATP在判断列车停稳且停准时,输出门允许指令,并将司机/车载ATO输出的开门指令通过无线通信系统转发到地面设备。 (3)地面CCS设备在确认对应股道列车停准且停稳后,依据列车类型和地面站台门设置情况,向对应的站台门控制系统发送开门命令,由站台门控制系统实施对站台门开启动作。 (4)ATO发车倒计时结束后,司机/车载ATO输出关门指令时,车载ATP将关门命令通过无线通信系统转发发送给地面设备。地面设备向对应的站台门控制系统发送关门命令,由站台门控制系统实施对站台门关闭动作。 (5)当车地通信故障、停准失败等异常情况,车门/站台门不能正常联动时,车门的开/关由司机人工操作,站台门开/关由地面人员通过站台门操作终端进行人工操作。 针对CTCS-2级高铁铁路列控车载ATP/ATO设备主要进行以下仿真测试。 (1)利用CTCS2+ATO测试平台和仿真扩展单元软件搭建测试环境,对车载ATP/ATO车载设备进行测试,基于测试平台搭建的测试环境如图11所示。 图11 基于测试平台搭建的测试环境 测试平台是实验室用于ATP/ATO设备的系统集成和测试系统,通过执行根据业务场景编制的测试脚本实现对列车运行地面环境的模拟仿真,利用在线监测软件记录并分析车载设备的运行状态。在该测试环境中,测试平台负责模拟发送BTM报文、控制转速平台模拟列车速度、控制发码器发送轨道电路信息、接收地面CTC、临时限速服务器的ATO信息并给系统提供各种测试数据。 (2)利用珠三角莞惠城际试验段中四站三区间的数据搭建仿真测试环境,对ATP设备(含仿真扩展单元)、ATO设备、TSRS设备、无线通信系统等设备进行系统功能测试。 结果表明:既有CTCS2+ATO列控车载ATP/ATO设备能够满足既有CTCS-2级高速铁路自动驾驶的需要。该方案对既有ATP设备的改动较小,在确保列车行车安全性的条件下,实现既有CTCS-2级高速铁路车载设备的功能需求。 珠三角城际铁路C2+ATO系统自2016年投入商业运营以来,已经稳定运行3年多的时间,系统功能满足城际铁路的运营要求且性能稳定,ATO停准率(±35 cm)100%,ATO准点率(偏差60s内)100%,获得了用户单位的好评。统计列车关键部件闸片更换情况,以2016年1月26日至2017年4月23日为例,各动车组更换闸片数据统计表明,装配ATO动车组极大减少列车行车制动时间(0402为非装配ATO动车组,其他为装配ATO动车组),如图12所示。 图12 动车组更换闸片数据统计 高速铁路动车组自动驾驶系统ATO是结合国铁CTCS-2级列控系统和城市轨道交通自动驾驶系统技术,实现了系统集成创新。2016年首次实现时速200 km城际铁路动车组自动驾驶并投入批量运用,处于世界领先水平。系统的推广应用将为国家节约大量人力成本,减轻机务劳动强度,提高乘客舒适度和列车准点率;售前、售后服务本地化,既有利于提高服务质量,又可降低服务成本,创造了良好的经济效益和社会效益。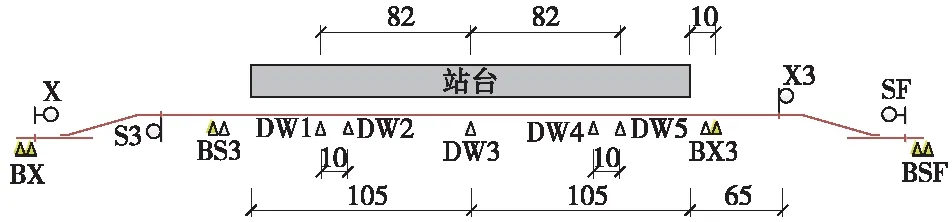
3.6 车地通信系统
3.7 无线通信软件结构设计


3.8 车门/站台门联控技术

4 系统测试
5 应用情况
6 结语
