交互多模型在高动态导航定位中的应用
2020-08-31范广伟刘岗风
王 刚,刘 峰,范广伟,刘岗风
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;3.中国人民解放军92941部队,辽宁 葫芦岛 125001;4.中国人民解放军63771部队,陕西 渭南 714000)
0 引言
高动态目标的导航定位一直以来都是航空航天和现代军事应用领域的研究热点[1-2],传统的最小二乘拟合定位[3]和卡尔曼滤波的导航定位方法[4]无法满足高动态条件下导航定位的需求,交互多模型[5]由于可以在目标运动过程中对目标的运动状态进行预测,从而自适应的改变定位的匹配模型,因此在高动态导航定位中有较好的应用前景。
交互多模型最初是应用在雷达的多目标跟踪中,很多专家学者基于交互多模型提出了很多目标跟踪定位的算法,Wang R等[6]将交互多模型应用在城市交通中的事故检测与预报中,王磊等[7]将交互多模型应用在机器人的导航定位中,张红旗等[8]将交互多模型应用在低空目标的跟踪和预测中,Xiong K等[9]对交互多模型在航天领域的应用进行了研究,Hwang I等[10]对交互多模型的稳定性进行了分析与研究,但是在卫星导航定位中交互多模型的应用目前还较少。
本文借鉴多目标跟踪中交互模型的跟踪定位算法[11-13],并应用到卫星导航定位中,解决高动态条件下的导航定位问题,简要介绍了算法的实现流程,并通过仿真验证了算法的正确性。
1 高动态条件下的目标模型
分析高动态目标的运动形式和定位需求,将高动态目标的运动状态分为三种模型的组合,分别是:匀速、匀加速运动模型、转弯模型等基本模型[14]。
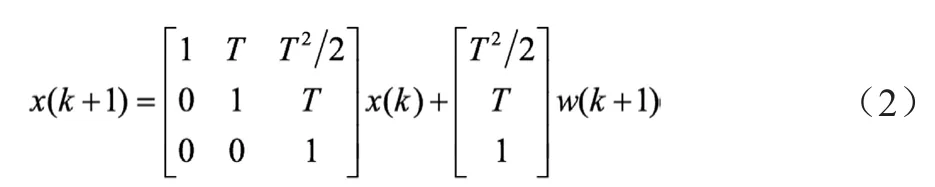
目标做匀速直线运动的模型可用CA模型表示,该模型的公式可表示为

当目标匀加速运动时,目标的运动状态为
导弹的转弯运动可用不同半径的圆周运动拟合,假设目标的转弯速率为ω,则转弯运动的模型可描述为:
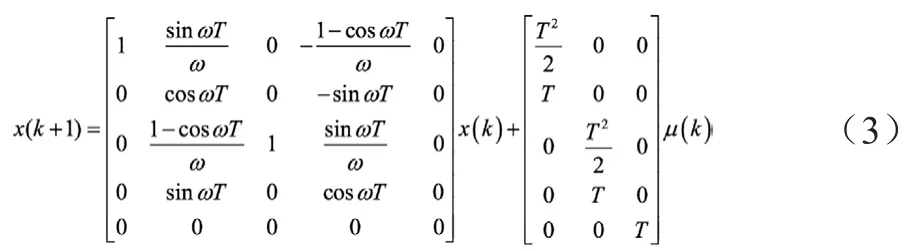
式中,k为滤波时刻;T为两次定位的时间间隔,可调整上述公式的转弯速率实现各种形态转弯的模拟。
2 基于交互多模型的导航定位算法
传统的导航定位方法是采用最小二乘或卡尔曼滤波的方法进行最后的定位处理,最小二乘的方法不需要任何先验知识,且结构简单,应用较为广泛,但是该方法动态性能较差,在高动态条件下定位精度不高;卡尔曼滤波需要建立状态模型,只能够拟合其中的一种运动状态,针对种高动态目标的定位在运动状态发生改变后无法收敛。
交互多模型采用多个模型交互融合,依靠模型的动态切换解决滤波模型与当前状态不匹配造成的导航定位误差。装有卫星导航定位模块的高动态目标一般都有惯导和其他的姿态测量设备,可以作为模型切换的先验知识,这些先验知识结合算法滤波过程中的一些信息提供给马尔科夫概率转移矩阵自适应调整模型,整个过程包括:输入交互、动态滤波、传感器辅助、概率更新和交互输出等步骤,其流程如图1所示:
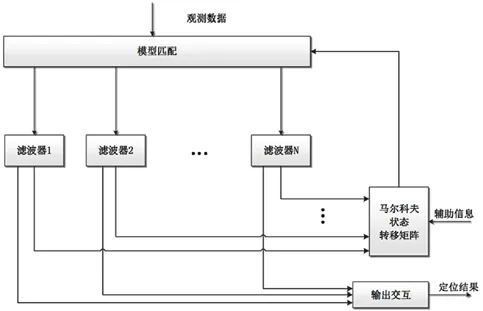
图1 交互多模型定位算法示意图
交互多模型的递推实现过程如下所示:
首先是输入的模型匹配,假设滤波器的初始状态为

方差预测为

第二步为滤波模型,将第一步得到的(k-1|k-1)和P0j(k-1|k-1)作为对应模型j的输入,采用每个模型对应的滤波器进行滤波,得到的滤波输出记为Pj(k|k)。
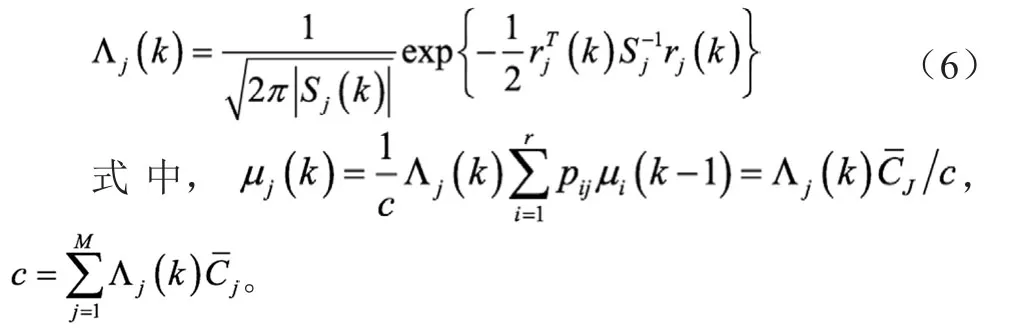
根据第二步得到的滤波传输系数得到模型j的滤波信息rj(k),相应的信息协方差矩阵为Sj(k),若服从高斯分布,则模型j的可能函数为
最后一步就是输出的混合
从而完成交互多模型的数据处理流程。
3 计算机模拟与数学仿真
为了验证本文提出算法的有效性,模拟高动态条件下的多模型的组合导航定位,设定高动态目标的3个运动状态的场景,验证在场景切换的条件下, 算法的定位性能。仿真高动态目标在做匀速运动、匀加速运动和S形运动,对比最小二乘定位、卡尔曼滤波定位和本文提出的交互多模型的定位算法性能。
假设高动态目标开始做初始速度为(5,5,3)m/s的匀速直线运动,1 s做一次定位的采样处理,设匀速运动300 s后开始做S形爬坡运动,再过300 s开始做匀加速运动,加速度为(0.1,0.6,0.8),共计采集700 s的定位数据,每隔1 s接收机出一次定位结果,三种算法的定位性能仿真如图2所示:
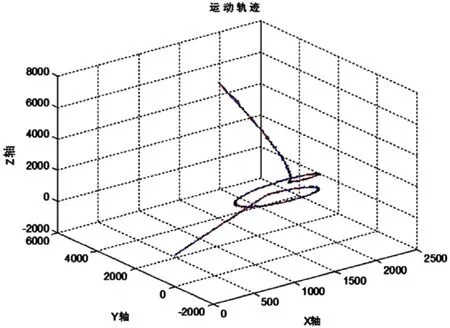
图2 三种算法的运动轨迹图
从图2可以看出,三种算法都能够在高度动态条件下实现定位解算,运动轨迹均符合目标的运动状态。为了更为直观的验证性能,给出三种算法在 轴上的定位误差对比,如图3所示。
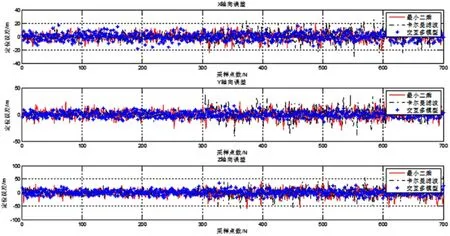
图3 三种算法定位误差对比
通过对比可以看出,在匀速运动阶段三种算法的定位性能差别不大,在转弯和加速运动阶段交互多模型的定位方法明显优于最小二乘和卡尔曼滤波的方法。但是,由于卫星导航系统自身设计的原因,高程相较水平有更大的误差,交互多模型的方法虽然对定位在三维坐标系下均有改善,但是由于在高程上由于误差较大,导致采用交互多模型的算法在高程上定位性能较差,但是相比其他两种算法在三个方向上的定位精度,均有所提高。计算三种算法在匀速、转弯和匀加速运动三个阶段的定位均方误差,定义为


表1 三种算法不同阶段的定位性能对比
从表1可以看出:最小二乘的定位方法适用范围比较广,在不同的运动状态下都能够达到一个中等的定位精度;卡尔曼滤波的方法在模型匹配度较好的时候定位精度较高,当模型不匹配的时候,定位性能急剧下降;交互多模型的导航定位方法通过模型的切换实现与当前运动状态的匹配,能够满足高动态导航定位的需求。
4 结束语
本文针对高动态条件下的导航定位问题,分析高动态条件下的卫星导航运动模型,并计算各个模型之间的关系,建立多模型联合定位的交互模型,并采用惯导辅助推算当前的运动状态,实现模型之间的切换。仿真结果表明:该方法在高动态条件下相比最小二乘和卡尔曼滤波有更好的定位性能,卡尔曼滤波只能实现一个模型条件下的匹配, 运动状态发生改变的时候定位性能下降较快。
