智能扫地机器人发展历程及未来趋势
2020-08-26张悦湘
张悦湘
(湖南农业大学机电工程学院,湖南 长沙 410128)
0 引言
从20世纪90年代末到21世纪初,由于计算机技术的飞速发展[1],各种新型的设备不断涌现,将中央处理器与各部件进行结合成为主流趋势,智能扫地机器人也随之兴起。日韩、欧洲、美国等发达国家和地区率先发现该产品的潜在市场,产品研发已取得不少进展。智能扫地机器人目前已经成为现代智能化家居中的重要组成部分。
1 智能扫地机器人发展历程
世界上第一款量产的智能扫地机器人家由电巨头莱克斯[2]于2001年推出,并将其命名为“三叶虫”(图1),设计者希望这款产品能如世界最古老的节肢动物一样爬过世界的每一寸土地。
图1 三叶虫智能扫地机器人[3]
三叶虫智能扫地机器人以单片机为核心,塑料材质的圆形外观。机器人利用底部的车轮实现行走,采用真空泵与滚筒刷相结合的方式进行扫地作业。为实现机器人的自主避障功能,机身配备有反射式超声波传感器。同时当内置电池电量不足或清洁任务完成时,机器人会自动返回充电桩。为防止机器人在使用期间跌落楼梯或驶出清洁区域,清扫的房间设有磁条,以此来限制机器人的活动范围。
美国机器人专家IRobot公司[4]自2002至今一直致力于Roomba系列扫地机器人的研发。该系列发展至今,除了节能、尺寸、外观和噪音等方面取得了显著优化外,最大的技术革新是机器人处理器中嵌入的“优化算法”。得益于“优化算法”的Roomba700系列相较于早期的Roomba500系列能够实现更智能的清扫轨迹。Roomba700在整个清扫区域中以一个递增的弧形[5]轨迹所移动,当识别到障碍物后,改变圆弧的方向,继续以递增弧形所移动。
韩国的Ottoro[7]视觉机器人(图2),配备了多个超声波探测器和2个摄像头。安装在充电桩上的激光投影[8]将导航图投射至天花板上,机器人依照导航图确定自身位置。机器人会根据探测器所收集到的信息进行自动避障。除此之外,Ottoro装配了一个强大的真空吸尘器以完成房间的清扫。Ottoro的清洁效率是同时期Roomba系列的2倍。这项产品在硬件、软件上都有极高的要求,以至于一台Ottoro的价格是Roomba的10倍。

图2 Ottoro扫地机器人
世界上第一个采用智能激光制导系统的智能扫地机器人由美国的Neato[9]公司所研发。机器人利用其顶部的激光雷达扫描房间,将房间布局转换成三维数字地图。并在此基础上采用“S”形路径规划[10]方式进行作业,单次清扫的覆盖率达到90%以上,即使在难以到达的角落区域,其独特的“D”形吸尘头也能进行高效清扫。
国内在智能扫地机器人领域的起步较晚,但近年也取得了显著的研究进展。苏州益节科技的地贝、苏州怡凯电器旗下的科沃斯、深圳智宝科技等已经达到与Roomba水品相近的程度[11],其产品线包含了超声波式、非接触式、磁铁、遥控器、阻挡器、红外式等关键技术。
2 关键技术分析
智能扫地机器人是一种具有先进定位技术和GPS导航技术的无线机器人。它可以通过遥控或自动控制面板来操控。充电后,自动完成清洗。通过红外传感器、光电传感器、距离传感器完成自动避障。采用PWM[12]技术结合编码器动态控制电机的旋转方向和速度。采用单片机编程技术实现机器人的移动、扫地、绕障、精确停机控制及检测数据的存储、显示(图3)。扫地机器人的感知系统是传感器系统,负责收集自身信息和环境信息。控制系统根据所收集的数据进行反馈,实现智能操作[13]。驱动系统采用直流电动机,通过脉宽调制控制电机电枢电压。一些单片机系统还需要在断电的时刻能够保存重要的数据,因此还配备有看门狗电路组成的复位系统[14]。利用功率传感器及红外传感器了实现扫地机器人自动充电功能。目前支撑扫地机器人的关键技术有4项,分别是传感器技术、室内定位技术、路径规划技术和扫地技术。
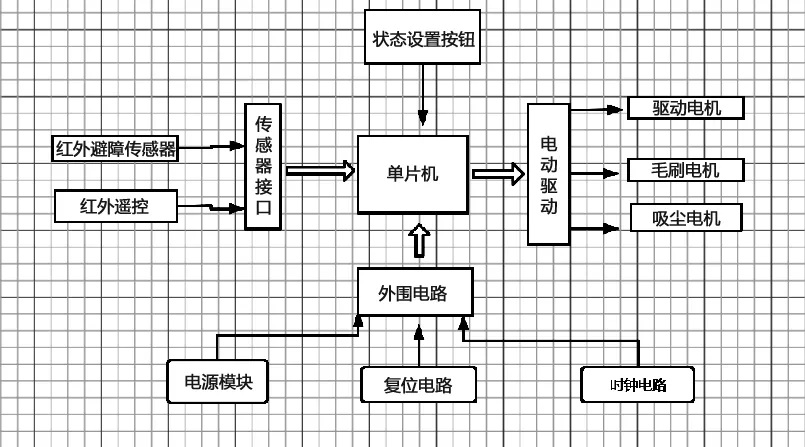
图3 智能扫地机器人功能简图
2.1 传感器技术
自主完成扫地任务是该机器人的主要功能。在室内环境中,机器人需要避开障碍物,检测污染物,以及根据自身位置建立环境模型[15],甚至有的还需要检测环境温度和PM2.5的含量。机器人需要将防跌落传感器、重量传感器和自身定位传感器等多项传感器进行集成。红外传感器与超声传感器是扫地机器人上使用最多的传感技术[16]。红外传感器的特点是测量精度高、方向性强,主要缺点是较难识别微小障碍物、深色的物体或透明物体。超声传感器与光学传感器相比具有环境适应性强的优点,能够测量真实距离,并获得声波方向上的三维数据。但声波传感器存在识别范围小,会受环境噪音污染等问题。在实际应用中,通常将超声传感器与红外传感器搭配使用。目前,传感器除了精度上有了明显改善外,也正朝着多样化、微型化的趋势发展。
2.2 室内定位技术
室内定位技术一般可根据环境感知传感器和本体感知传感器分为2大类。基于环境感知传感器的定位是指利用导航信标、主动或被动标志或卫星导航[17]进行定位,一般用于信标或GPS信号覆盖的户外区域。另一种根据本体传感器的定位是基于初始位置与目前位置的相对距离和方向来确定目前位置的定位坐标,这种方法也被称为航迹推算法[18]。近年来兴起的一种新型定位技术手段是视觉定位,它依靠摄像头拍摄图像,并根据图像中的环境特征进行定位,图像能提供的环境信息是极为丰富的。
2.3 路径规划技术
路径规划是扫地机器人最重要的技术环节之一,该技术的主要功能是根据算法对路径进行规划,实现扫地区域路径的科学化梳理。目前路径规划主要依赖的工具是视觉系统以及视觉信号处理软件[19]。视觉系统主要是为了监测和观察周围的环境以及物体位置的确定,在路径规划的计算中,算法软件会自动规避障碍物所在位置的路径,寻找扫地路径最为优化的路线。在缺乏环境建模的情况下,机器人往往采用随机移动的方式,当识别到障碍物时更改行进方向,通过大量的随机行进以增加覆盖面积。第二种情况是基于环境地图,使用“S”形方法进行反复扫描。采用“S”型路径规划的清洁面积达到90%以上。
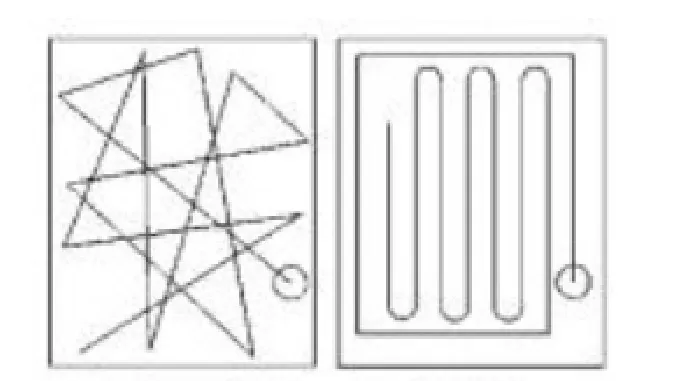
图4 1.随机规划;2.s型规划
路径规划的算法有许多种,应用最为广泛的算法有:Dijkstra算法、神经网络算法、栅格法等。栅格法是机器人领域使用最广泛的一个算法,其主要的工作原理就是将扫地机器人的工作场景划分为大小相等的正方形方块表示,方块的面积越小所能创建的环境地图就越清晰和精确,这也是扫地机器人路径规划先进与否的重要标志。方块的面积越小就代表每个方格所储存的清晰度越高,但这会造成储存的数据过大,在实际应用中会需要更长的规划时间。如果方块的面积太大,那每个方块存储的信息就会越多,清晰度也就会越低,存储的数据量降低,路径规划所需要的清晰度就不能满足。对于扫地机器人来说,选择合适的单元格大小至关重要。
2.4 扫地功能
机器人底部一般配备3个扫地刷,与滚筒刷一同作业[20]使用。真空吸尘是常用的作业方式,通过高速旋转的扇叶形成气流,气流经过细小网口的滤网[21],细小灰尘将附着在过滤网上,颗粒较大的污染物则会掉入存储盒内。为保障气流的顺利流通,需要经常清理吸尘装置的过滤网和存储盒。英国的戴森[22]公司利用其所开发的多圆锥气旋技术很好地解决了这个问题。多圆锥气旋技术是通过旋转的气流将粉尘和大颗粒污染物卷起,大颗粒由于自身重量被甩入收纳盒内,粉尘则进入更小的气旋内。该技术很好地解决了需要频繁更换收纳盒和过滤网的问题,同时也保证了清洁效果。
3 现有问题及改进措施
(1)目前扫地机器人普遍使用镍氢电池,充电时间长,使用寿命短。如Irobot系列的扫地机器人当作业于大面积环境清扫时,虽然可以自动充电,但需要充电3h才能满足2h作业的需求,极长的充电时间使其使用非常有限,且该机器人所使用的电池寿命只能维持2年左右。
增大电池容量是最直接延长续航的手段,但大容量的电池往往会占据更大的空间,使得空间本就局限的扫地机器人无法满足实际需求。因此开发新型材料电池是提高扫地机器人续航能力的关键,除此之外更小巧的电池体积可以减小机器人整体体积及重量,更能满足日常使用的需要。
(2)机器人作业时的避障分为完全避障和缓冲避障。如果使用超声波仿生技术则可以实现完全避障,但是该技术成本非常高,所以应用并不广泛,而红外传感技术是绝大部分扫地机器人所应用的技术,当碰到圆柱形或者不规则物体时,由于红外传感器对这类物体无法有效识别,会与障碍物表面发生接触,最终会对障碍物以及机器人表面造成一定损伤。
为降低机器人在作业过程中发生的碰撞所带来的损伤,可以选择优化传感器性能,或将高性能传感器产业化生产,以降低高性能传感器的使用价格。除此之外可以利用半包裹的软橡胶外壳或软冲击式防撞板,以物理式的缓冲减小损伤。
(3)智能扫地机器人吸尘口径偏小且配备有螺旋状滚筒刷,对于细小灰尘等能有较强的清洁效果,但是大颗粒污染物便无法处理,影响整体清洁度。
机器人吸尘口径小,齿轮密度大,导致大颗粒物体不能被有效清理。可以考虑将机器人底部配备一个大口径吸尘口,当遇到大颗粒污染物时,可以直接通过大吸尘口进入储存盒,而不经过螺旋刷。
4 结语
虽然扫地机器人的部分关键技术还有待完善,但随着传感器微型化、集成化以及软件算法的不断优化,扫地机器人将会得到长足的发展。人们对于扫地机器人的认识不断加深,也将进一步扩大该产品的市场需求。