基于神经网络的目标分群及目标运动状态预测
2020-08-26张永利刘楠楠王兆伟
张永利,刘楠楠,王兆伟
(中国电子科技集团公司电子科学研究院,北京 100041)
0 引 言
态势估计是对战场上敌、我、友军及战场环境的综合情况和事件的定量或定性描述,以及对未来战场情况或事件的预测。复杂战场环境中,解决战场态势感知问题,对于最终运用多种手段综合分析目标威胁程度、实施精确火力打击具有关键的作用[1-5],是实现智能化辅助决策的重要问题。
态势估计是对动态变化的对象感知并对提取的态势要素进行觉察、理解和预测的处理过程。态势觉察对获取的平台数据完成简单处理、相关、变换和动态信息的实时更新,在提取态势要素的基础上,完成目标分群或聚类,是态势估计需要实现的一个重要功能,是一级融合的延伸和高级融合阶段的切入点。态势觉察阶段对目标分群的处理方法,主要是根据敌方各实体的属性信息进行的。本文以目标运动状态特征为依据,提出利用自组织竞争神经网络,解决目标分群的问题。
态势预测是态势感知的第3个阶段,基于态势理解的评估结果,依据假定的蓝军和红军军事行动,使用自动化辅助管理预测实时、近实时和非实时的军事行动态势。由于战场情况瞬息万变,空中目标的运动特征具有明显的时变性和不确定性,要求神经网络具有可反应系统随时间变化的动态特性及存储信息的能力。动态递归神经网络——Elman神经网络可以任意逼近非线性函数及通过学习历史数据建模,既可以学习时域模式,也可以学习空域模式。利用Elman神经网络对数据库中累积目标的运动特征进行网络训练,为实现目标运动状态的预测以及航迹接续提供一种借鉴[6-8]。
1 基于自组织竞争神经网络的目标分群技术
1.1 目标分群
态势觉察包括战场信息的捕获和输入,所获取的信息包括图形、图像、数据和报告。对平台数据完成简单处理、相关、变换和动态信息的实时更新,为态势推理做准备,主要内容包括:态势要素提取和目标分群。在提取态势要素的基础上,完成目标分群或聚类,是态势估计需要实现的一个重要功能,是一级融合的延伸和高级融合阶段的切入点。态势觉察阶段对目标分群的处理方法,主要是根据敌方各实体的属性信息进行的。下面研究利用自组织竞争神经网络实现目标分群。
1.2 自组织竞争神经网络结构
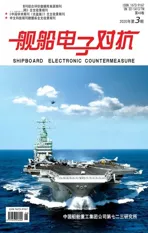
自组织神经网络采用无导师学习方式,通过自动寻找样本中的内在规律和本质属性,自组织、自适应地改变网络参数与结构。自组织网络结构属于层次型网络,有多种类型,共同特点是都具有竞争层。自组织竞争神经网络为单层神经元网络。自组织竞争神经网络的基本思想是网络的竞争层各神经元竞争获取对于输入模式响应的机会,同一时刻只有一个神经元胜出,这一获胜神经元表示对输入模式的识别。自组织竞争神经网络的典型结构见图1。
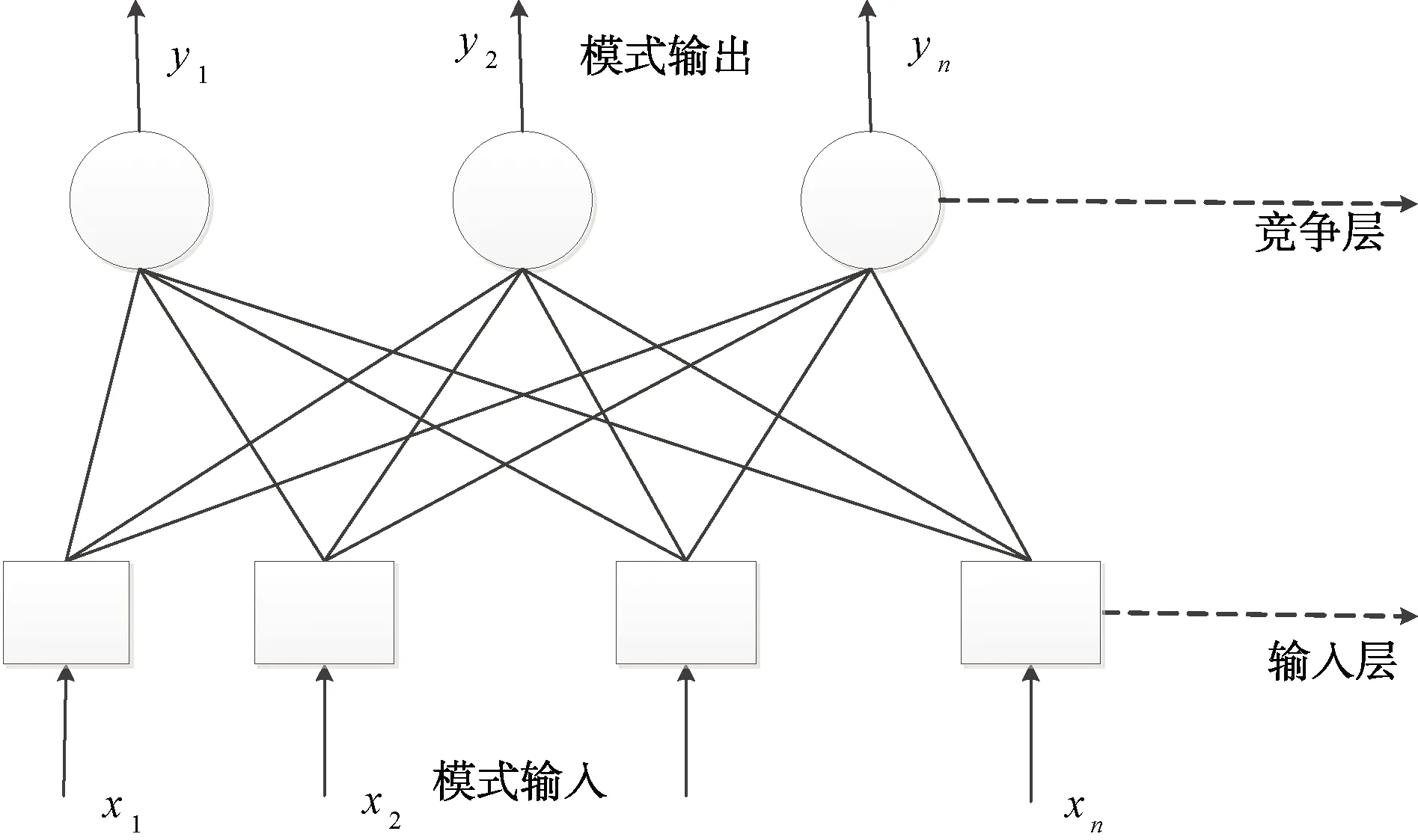
图1 自组织竞争神经网络的典型结构
1.3 自组织竞争神经网络学习规则
(1) 向量归一化

(1)
(2) 寻找获胜神经元
(2)

(3) 网络输出与权调整
获胜神经元输出为1,其余为0,则:
(3)
获胜神经元有权调整权向量Wj*,其权向量学习调整为:
(4)
式中:α为学习率,0<α≤1。
(4) 重新归一化
归一化的权向量经过调整后,不再是单位向量,需要重新归一化。
1.4 自组织竞争神经网络仿真
各种机型的飞机战斗能力是不一样的,包括预警机、战斗机、轰炸机、直升机、舰载机等。在态势估计系统中,针对完成的不同任务,有不同的态势,包含不同的战机。传感器在某一时间段内对同一目标测量的数据相距较近,对不同目标的量测数据相距较远,在整个空间对同一个目标的量测数据进行聚类,从而将不同的目标进行分类,实现目标分群;并通过神经网络学习,识别出待定目标。下面利用自组织神经网络,对表1提供的4类机型飞行动态数据进行分类。

表1 4类机型飞行动态数据
将上述数据载入并进行仿真,仿真结果见图2。

图2 自组织竞争神经网络仿真
结果表明,应用自组织竞争神经网络能很好地实现对目标的分类,结果合理。采用训练样本以外的数据对网络进行测试,自组织竞争神经网络仿真结果表明,该数据属于舰载机,成功地识别了该组数据。
2 基于Elman神经网络的目标运动状态预测
2.1 Elman神经网络结构
动态神经网络也称为回归神经网络,源于信号的延迟递归使得网络在某一时刻k的输出状态不仅与k时刻的输入状态有关,还与k时刻以前的递归信号有关,能够直接生动地反映系统随时间变化的动态特性及存储信息的能力。Elman神经网络是动态神经网络的一种典型代表,既可以学习时域模式,也可以学习空域模式,具有适时应变的能力[9-13]。
Elman网络结构一般分为4层:输入层、隐含层、承接层、输出层。其网络结构如图3所示。输入层单元仅起到信号传输的作用。输出层单元起到线性加权的作用。隐含层单元的传递函数可以采用线性或非线性函数。而承接层单元用来记忆隐含层单元前一时刻的输出值。
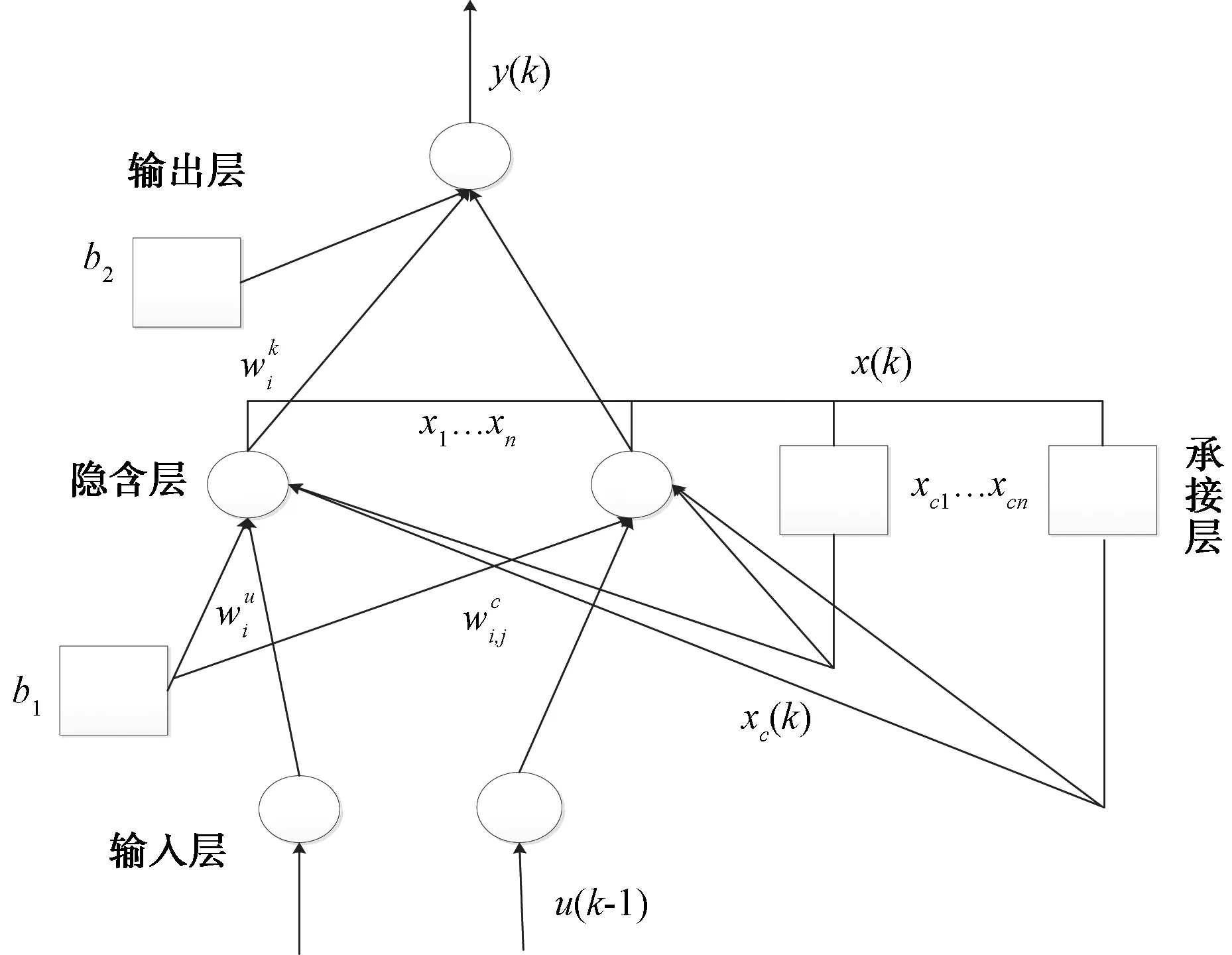
图3 Elman神经网络结构
具体来说,在Elman神经网络的模型中,在隐含层第k-1时刻的输出加上其在第k-1时刻输出的a倍就等于结构单元在k时刻的输出,即:
xC,l(k)=αxC,l(k-1)+xl(k-1)
(5)
式中:xC,l(k)表示第l个结构单元的输出,l=1,2,…,n;xl(k)则表示第l个隐含层单元的输出;a为自连接反馈增益因子。
Elman网络的数学模型为:
x(k)=f(ω1xC(k)+ω2u(k-1))
(6)
xC(k)=αxC(k-1)+x(k-1)
(7)
yk(k)=g(ω3x(k))
(8)
f(x)一般取为sigmoid函数,即:
峰值荷载后在CD段卸载时,以K56为卸载刚度,沿56进行卸载,若卸载后反向加载未过峰值点,则沿路径6C′D′进行加载,若反向加载超过峰值点,则沿路径65′D′进行加载;在C′D′段的卸载情况与CD段相似。
(9)
g(x)一般取为线性函数,即:
yk(k)=ω3x(k)
(10)
2.2 Elman神经网络学习算法流程
Elman神经网络学习算法流程图如图4所示。
图4 Elman神经网络流程图
2.3 基于Elman神经网络的目标运动状态预测仿真
2.3.1 问题背景
空中目标状态预测可被看作一个复杂的非线性系统。传统的时间序列预测技术难以揭示其内在的规律,必须借助具有非线性映射能力的系统。应用基于Elman神经网络及优化算法对空中目标运动状态进行预测,是一种性能较好的方法。Elman神经网络由于增加了连接层这个结构,所以能够对过去的状态进行记忆,基于这个特点,Elman神经网络一般用于处理时间序列相关的一些问题。在本文所构建的空中目标运动状态预测的数学模型中,采用若干个时间点的空中目标经度、纬度、高度、航向、航向变化率、速度变化率7个指标,预测下一个时间点的目标经度、纬度、高度、航向、航向变化率、速度变化率,从而是一个时间序列问题,因此可以用Elman神经网络进行求解。假设取前N个时间点空中目标经度、纬度、高度、航向、航向变化率、速度变化率数据,预测第N+1个时间点的运动状态指标,映射函数表示为:
xn=f(xn-1,xn-2,…,xn-N)
(11)
对于给定时间点的目标经度、纬度、高度、航向、航向变化率、速度变化率的数据,首先将这些数据分成训练样本和测试样本。以训练样本为例,抽取x1~xN组成第1个样本,其中(x1,x2,…xN-1)为自变量,xN为目标函数值;抽取x2~xN+1组成第2个样本,其中(x2,x3,…xN)为自变量,xN+1为目标函数值,依此类推,最终形成以下训练矩阵:
(12)
其中每列为一个样本,最后一行为期望输出。Elman神经网络将训练样本输入Elman网络进行训练,即可得到训练完成的网络[9-13]。
2.3.2 Elman神经网络进行目标状态预测步骤
利用Elman神经网络进行目标状态预测的步骤如图5所示。
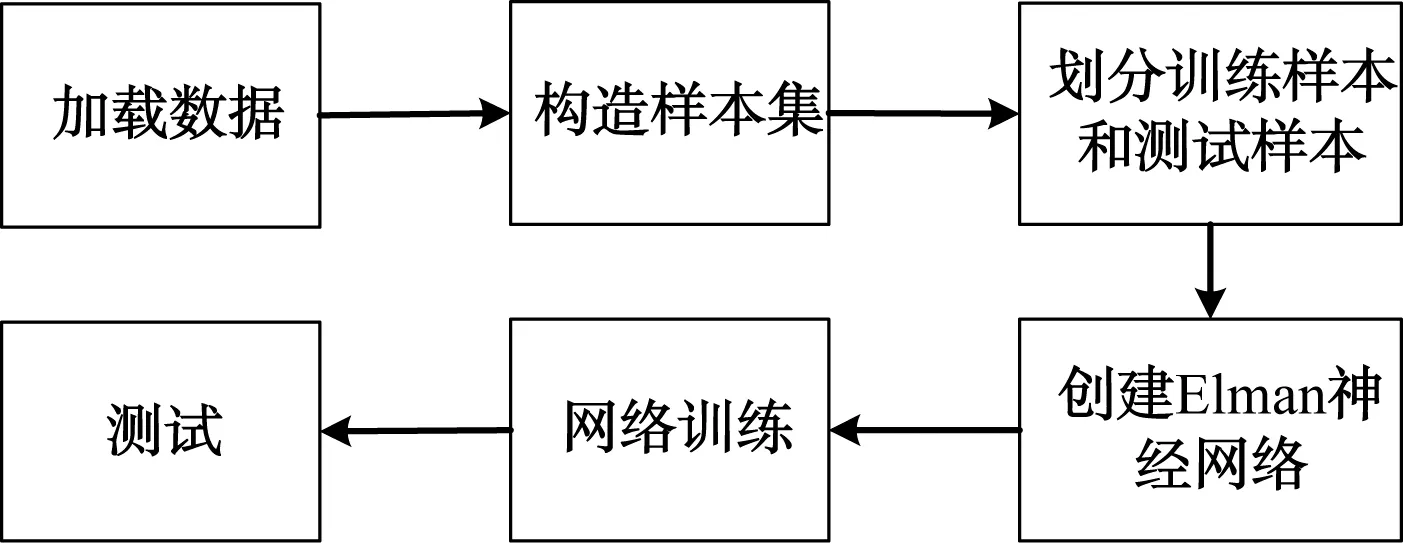
图5 基于Elman神经网络的目标状态预测流程图
其中,“构造样本集”步骤将每个时间点的前N个目标经度、纬度、高度、航向、航向变化率、速度变化率等数据提取出来,构成自变量,将当前时间点的目标经度、纬度、高度、航向、航向变化率、速度变化率作为目标输出。“划分训练样本和测试样本”步骤将前若干时间点的目标经度、纬度、高度、航向、航向变化率、速度变化率数据作为训练样本,剩下的数据作为测试样本,使得测试样本在时间上晚于训练样本,与目标经度、纬度、高度、航向、航向变化率、速度变化率的产生顺序相吻合。对同一样本多次训练并测试,取得最终结果的平均值作为预测值。
对基于Elman神经网络的空中目标运动状态预测按以下步骤实施:
步驟1:加载数据。在网络输入端输入所有的输入序列。
步驟2:对于给定的空战实测数据,首先利用目标规矩数据构建训练样本和测试样本。抽取x1~xN组成第一个样本,其中(x1,x2,…xN-1)为自变量,xN为目标函数值,依此类推。预测第48周态势值时,利用前43组的数据作为网络的输入样本。经过大量人工试验,得出本文Elman神经网络具体仿真参数设置如下:每7周的态势值作为输入向量,第8周的态势值作为目标向量。这样可以得到36组训练样本。第44周的数据作为测试样本,用来验证该预测算法的精度。本次仿真设置隐藏层神经元个数分别为7次、11次、14次和18次,预测结果选择最优结果。
步骤3:网络训练。创建好Elman反馈网络以后就要对网络进行训练。训练之前,需要对训练样本和测试样本进行数据归一化处理,保证网络的性能和稳定性。
步骤4:测试。在步骤3确定的网络结构下,再次训练网络模型,并对测试样本的运动状态进行预测,观察预测效果。
2.3.3 基于Elman神经网络的预警机运动状态预测仿真
下面基于预警机仿真实时空情数据,进行预警机运动状态预测仿真。时长412 s,以10 s的时间间隔进行采样。利用前43组预警机动态数据作为网络的训练样本,每7组的运动状态数据作为输入向量,第8组的运动状态数据作为目标向量,这样可以得到36组训练样本。第44组的数据作为网络的测试样本。预警机仿真实时空情数据见表2。
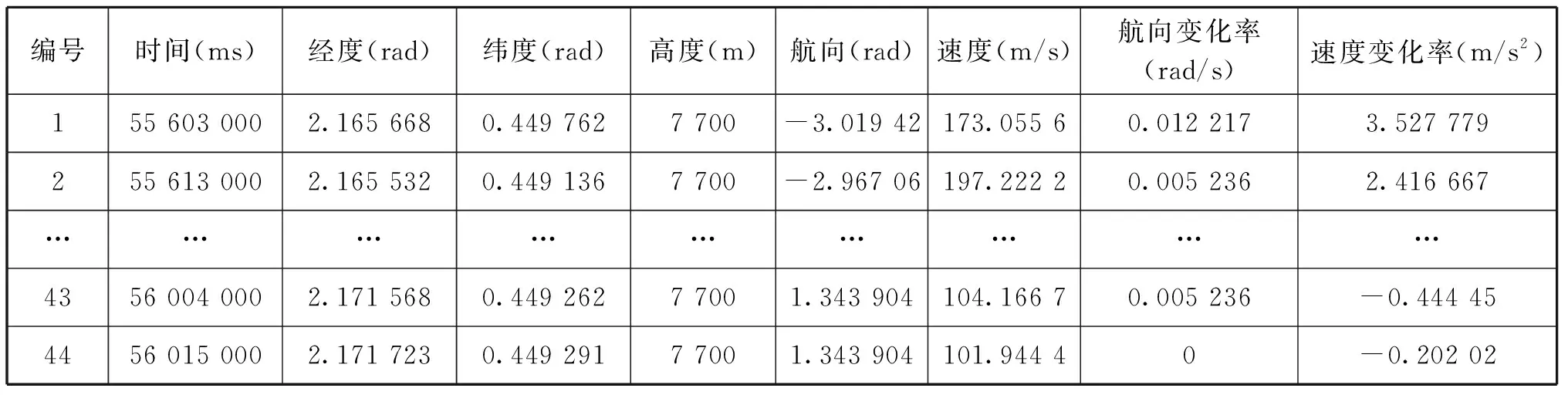
表2 预警机实时空情
由仿真可以看出,预测目标运动状态误差较小,中间神经元为11时,网络预测误差最小,即预测性能最接近,仿真如图6所示。

图6 Elman神经网络预测预警机运动状态误差图
2.3.4 基于Elman神经网络的战斗机运动状态预测仿真
下面选取战斗机仿真实时空情数据作为样本数据,时长423 s,以10 s的时间间隔进行采样。利用前43组预警机动态数据作为网络的训练样本,每7组的运动状态数据作为输入向量,第8组的运动状态数据作为目标向量,这样可以得到36组训练样本。第44组的数据作为网络的测试样本。战斗机仿真实时空情数据见表3。
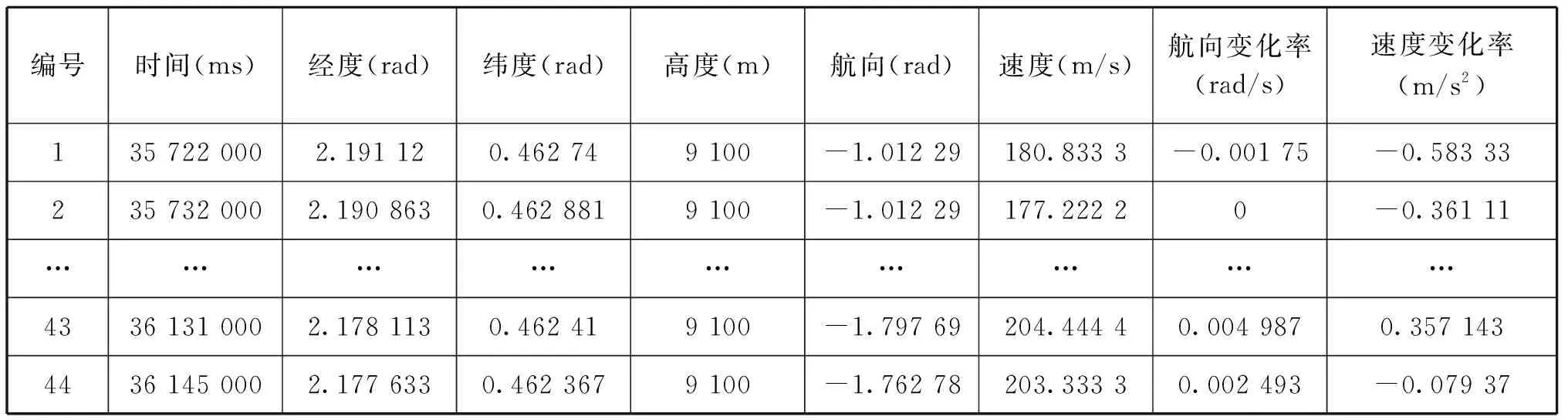
表3 战斗机实时空情
结合目标的运动特征,目标的经纬度、高度、速度、航向、航向变化率、速度变化率,利用Elman神经网络进行分析,仿真如图7所示。
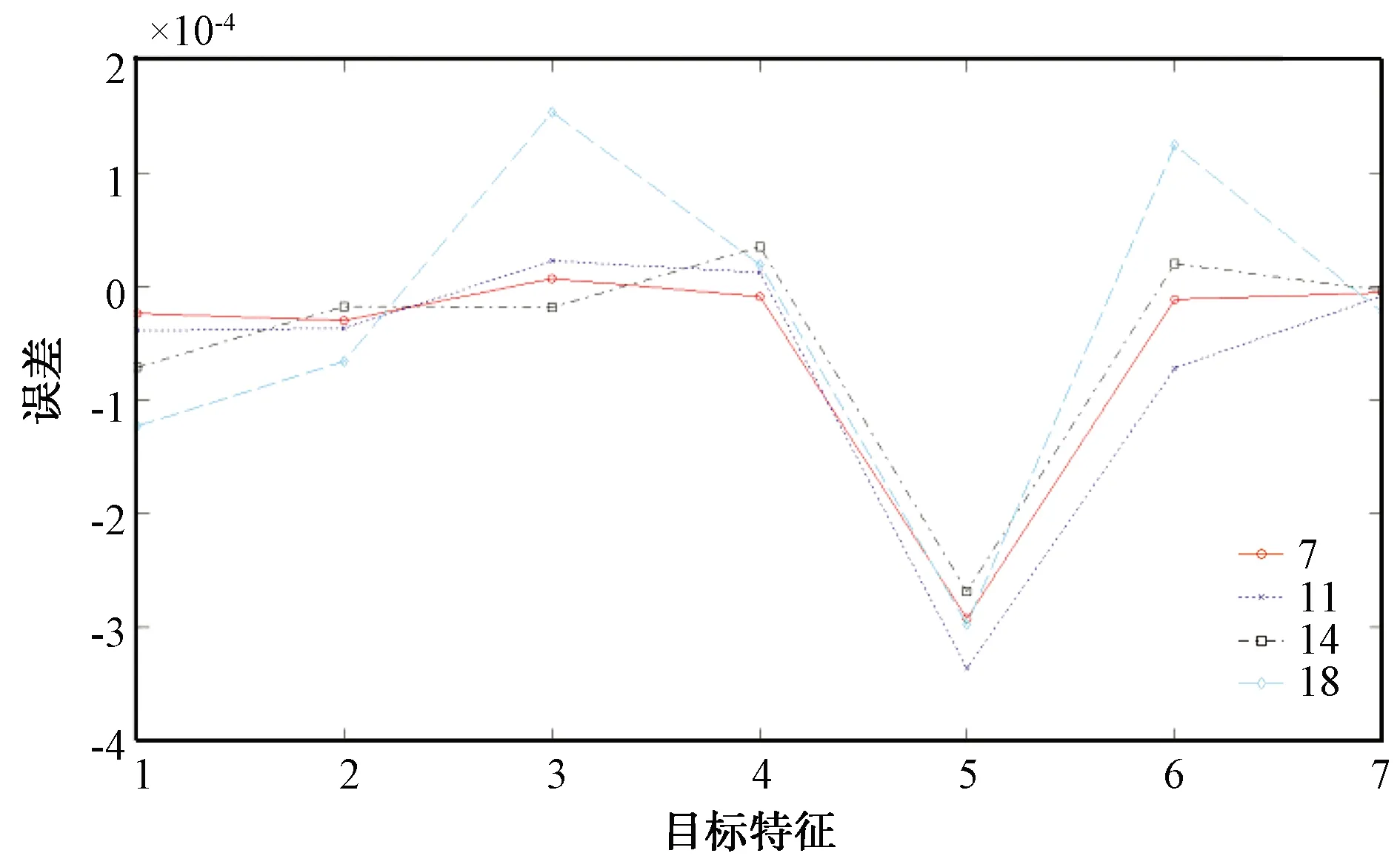
图7 Elman神经网络预测战斗机运动状态误差图
基于战斗机仿真实时空情数据,进行战斗机运动状态预测仿真。由仿真可知,对战斗机运动状态预测误差比较小,Elman网络能合理预测战斗机的运动状态。其中中间神经元为7、11、14时,网络误差相对较小;中间神经元为18时,网络误差相对较大。由图6和图7仿真结果可以看出,预警机的状态预测误差比战斗机状态预测误差大,这是由战斗机较大的机动性决定的。
3 结束语
本文运用自组织竞争神经网络和Elman神经网络2种神经网络的结合,对目标进行分类、识别,对目标运动状态进行预测。利用自组织竞争神经网络实现对目标飞机的分类,并能有效识别2类数据之间的微小偏差。建立基于Elman神经网络的空中目标运动状态预测模型,根据已经探测的空中目标的实时状态指标,对目标下一步运动状态进行预测并进行仿真分析,能够直接生动地反映系统随时间变化的动态特性,为解决多传感器、多目标航迹接续问题提供理论支撑和借鉴。