轴向预压缩双晶片动力学模型与特性分析*
2020-08-06刘士祥
陈 恒, 陈 超, 刘士祥, 程 罡
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
引 言
压电双晶片具有结构简单、质量轻、带宽高等优点,但由于压电陶瓷本身的激励应变小[1],一般只有几百个微应变,因此压电双晶片存在输出位移小的缺点。传统上需要设计机械式的位移放大机构放大双晶片的输出位移,但这却在一定程度上降低了双晶片的输出力[2-4]。针对这一问题,Lesieutre等[5]提出了后屈曲预压缩(post-buckled pre-compressed,缩写为PBP)的概念,通过理论分析及实验得出的结论表明,对双晶片施加轴向预压力能够同时提高其力与位移输出能力,显著提高双晶片的机电转换效率。理论上当轴向预压力达到双晶片的一阶屈曲临界载荷时,双晶片的机电耦合系数将达到1[6]。基于这一原理,国外的学者们将预压缩双晶片应用于多种飞行器舵机的设计与应用中,并取得了一系列的成果[7-11]。
为了分析双晶片在轴向压力下的静、动态特性,Giannopoulos等[12-13]利用非线性力学的方法建立双晶片的理论模型,并进行了双晶片在不同轴向力下的静变形实验。Giannopoulos由经典层合板理论给出轴向受压双晶片的平衡方程,将双晶片的挠度展开为傅里叶级数的形式(即假设挠度为各阶屈曲模态的线性叠加),给出双晶片的总势能,利用最小势能原理及拉格朗日乘子法求解出特定边界条件下傅里叶级数中的各阶未知系数,从而得到双晶片在轴向力及电压作用下的静挠度表达式,并通过实验和ANSYS软件验证了分析模型的正确性。
基于PBP概念的压电双晶片作为飞行器舵机的驱动部件,其性能对舵机性能有着至关重要的影响。因此,有必要确切地描述双晶片在轴向预压力下的静、动态性能。2005年,Ron Barrett团队将PBP作动器应用于自主式飞行器时,通过将压电产生的效应等效为简支梁两端的弯矩建立了双晶片的静力学模型,该模型得到了双晶片发生静变形的解析表达式[9]。2007年,该团队又将双晶片应用于机翼的飞行控制中,同时建立了双晶片的动力学模型。 该模型将双晶片化为单自由度系统,通过假设形状函数,带入动能、势能和功的表达式,利用Lagrange原理得到压电双晶片的模态方程,然后通过系统的等效刚度和质量来求得双晶片的一阶固有频率[11]。这些方法虽然可以得到系统的静、动态特性,但却无法用一个表达式来描述双晶片的所有模态,使双晶片的各阶模态较为直观地显现出来。笔者通过推导双晶片各层的应变能、动能、电势能和外部力的描述,将力和电的作用纳入到统一的框架中,得到系统关于中性层挠度的泛函表达式,再通过Hamilton原理得到轴向预压缩条件下双晶片的动力学方程与特定的边界条件。通过求解偏微分方程不仅得到系统的静变形,同时得到了双晶片关于各阶频率和阵型的解析解表达式,并对系统的动力学特性进行了分析。
1 压电双晶片的机电耦合模型
1.1 动力学方程的建立
舵机用双晶片模型如图1所示。双晶片一端固定铰支,一端可沿轴向滑动,舵片与固定铰支端固连,通过给双晶片施加电压带动舵片旋转。

图1 预压缩双晶片的驱动原理Fig.1 Driving principle of axial pre-compressed piezoelectric bimorph
Hamilton原理是以变分为基础的建模方法,常用来建立连续质量分布和连续刚体分布系统(弹性系统)的动力学模型。压电双晶片可以简化为一个3层的压电层合板,具有力和电场的耦合作用,对于这样无限自由度的机电耦合系统应采用能量法较为简便。因为双晶片的变形量较小,基于欧拉梁的假设,忽略微元转动的基体动能[14]
(1)

同理,压电陶瓷层的动能为
(2)
其中:下标p表示压电陶瓷。
基体的纯弯曲应变能为
(3)
其中:Es为基体的弹性模量;Is为基体的截面惯性矩;w″为中性层挠度对坐标轴x的二阶导数。
压电陶瓷层的应变能为
(4)
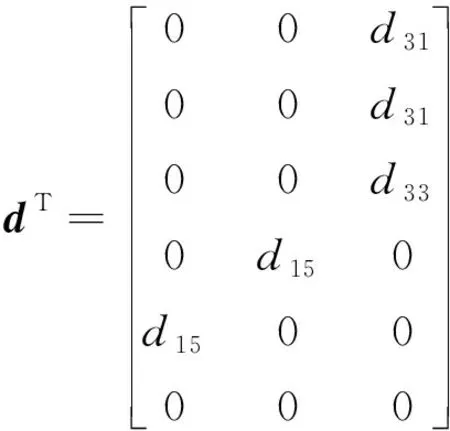
为了得到压电陶瓷片应变能关于双晶片中性层挠度的表达式,可由压电方程得到压电层应力、应变及外部电场强度的关系,并通过梁的几何方程得到应变与梁的弯曲曲率之间的关系,而由小变形假设可以将曲率近似为挠度对x轴的二阶导数,由此可得以挠度为自变量的压电陶瓷层应变能泛函。已知d型压电本构方程为
s=SET+dTE
(5)
D=dT+εTE
(6)
其中:s为应变向量;SE为柔度矩阵;d为压电常数矩阵;E为外加电场向量;D为电位移向量;T为应力向量;εT为介电常数矩阵。
由欧拉梁的基本假设,忽略剪切变形,双晶片外部电场只有E3≠0。因此有
(7a)

(7b)

(7c)
由于在欧拉梁假设下的正应力仅σx≠0,并由式(5)、式(7)可得压电梁压电陶瓷层的应变向量


(8)
由式(8)得到压电陶瓷层x向正应变为
sx=S11σx+E3d31
(9)
然后得到x向正应力为
(10)
其中:Ep为压电陶瓷在1方向的弹性模量,大小为柔度S11系数的倒数。
每片压电陶瓷的弯曲应变能为
(11)
其中:h为厚度;b为双晶片的宽度。
将式(10)代入式(11)可得

(12)
已知梁弯曲的小变形几何方程为
sx=-zw″
(13)
将式(13)代入式(12),得到关于中性层挠度的压电陶瓷层应变能表达式为
(14)
由式(14)及式(3)可以得到压电陶瓷层的截面惯性矩为
(15)
为了得到压电陶瓷层关于挠度的电势能泛函
(16)
由式(6)、式(7)、式(10)和式(13)可得
(17)
积分后可得
(18)
其中:E3为z向电场强度。
E3与压电陶瓷层的外加电压伏值V之间的关系为
E3=V/hp
(19)
F为轴向压力,假设其方向沿x轴负方向,小变形假设下近似为
(20)
整个双晶片的动能、势能以及外部作用为
(21)
其中:下标bi表示压电双晶片。
由哈密顿原理,通过求泛函的驻值
(22)
得到关于中性层挠度的偏微分方程。可以看出,双晶片的动力学方程与普通均质梁具有同样的形式,逆压电效应没有体现在方程中而是在边界条件里
(23)
可得到简支边界条件为
(24)
1.2 双晶片驱动器的动力学特性
通过分离变量法可将前面描述驱动器的力学偏微分方程分解为两个常微分方程,由具体的边界条件得到关于频率的线性方程组。令该方程组的系数矩阵行列式为零,可解出驱动器在特定边界条件下的固有频率,并通过求解方程组对应的齐次方程得到系统的固有振型。假设外加电场为简谐激励形式,从上述偏微分方程可求解得到驱动器的稳态响应[15]。利用该方法得到双晶片简支条件下的固有频率与固有振型的解析表达式如下。
固有频率为
(25)
固有振型为
(26)
为了得到双晶片在简谐激励下的响应,令外加电压为
V=vsin(ωt)
(27)
不考虑阻尼,可假设双晶片的响应为
w=φ(x)sin(ωt)
(28)
将式(28)代入式(23)及边界条件(24)中解得
φ(x)=aTb
(29)
其中

(30)
(31)
(32)
(33)
1.3 双晶片驱动器的静态特性
为了得到驱动器的静态特性,只需将动力学方程中的加速度项为零,即可得到描述该机电耦合系统静态特性的微分方程,然后可求解得到双晶片在不同电压、轴向预压力下的静态输出特性。
由式(23)得到静态挠度方程为
EIw(4)+Fw″=0
(34)
其通解为
(35)
由式(24)、式(34)得
(36)
通过求解上述矩阵方程可得到边界条件式(24)下驱动器的静变形为
(37)
简支条件下双晶片输出轴转角,即x=0处转角为
(38)
简支的双晶片滑动端x向位移为
(39)
由式(25)令ω1=0,得到简支双晶片的一阶屈曲临界载荷为
(40)
2 双晶片的有限元分析
通过以上分析建立了描述轴向预压缩双晶片的动力学方程,从其动力学方程及边界条件中得到静挠度、输出转角、固有频率及固有振型等的解析解。
作为比较,利用ANSYS软件对双晶片进行有限元分析,双晶片的几何尺寸及材料属性由表1给出。压电陶瓷的刚度系数矩阵(单位为GPa)如下
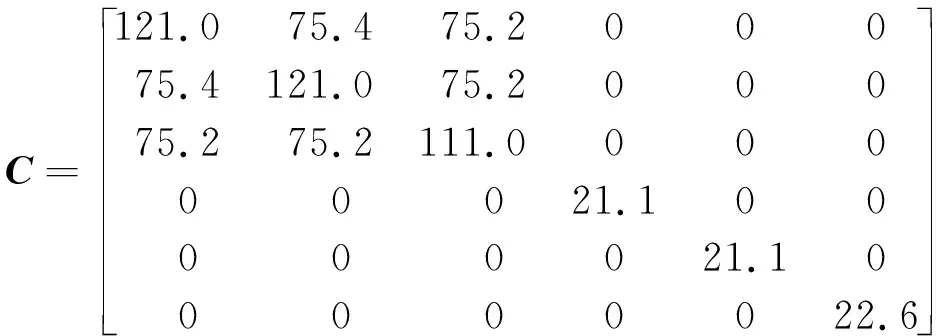
(41)
2.1 驱动器的静态特性
根据表1中的数据,分别对双晶片施加不同的电压和0.05倍~0.85倍屈曲临界载荷的轴向力,并利用上节中的理论分析得到相应的结果。同时利用ANSYS软件进行静力学分析,压电陶瓷层选用solid226单元类型,基体选用solid186单元,在分析设置中打开大变形选项。设压电陶瓷的压电应力系数e33=e15=0,已知d31可从陶瓷层的刚度系数矩阵求出对应的e31=-30.217 2 C/m2。
从模型计算得到双晶片的一阶屈曲临界载荷Fcr=96.97N。对于简支双晶片一般把固定铰支端作为输出轴,通过输出轴的转动驱动舵面偏转。由于ANSYS不能直接计算出双晶片的固定铰支端转角,可从ANSYS计算结果中提取距离固定端1mm处的挠度w,则双晶片的输出转角近似为θ=arctan(1 000w)。式(37)、式(38)得到的结果与ANSYS计算结果如图2、图3所示,横坐标为按屈曲临界载荷归一化的轴向力,纵坐标为双晶片的最大挠度与最大转角。
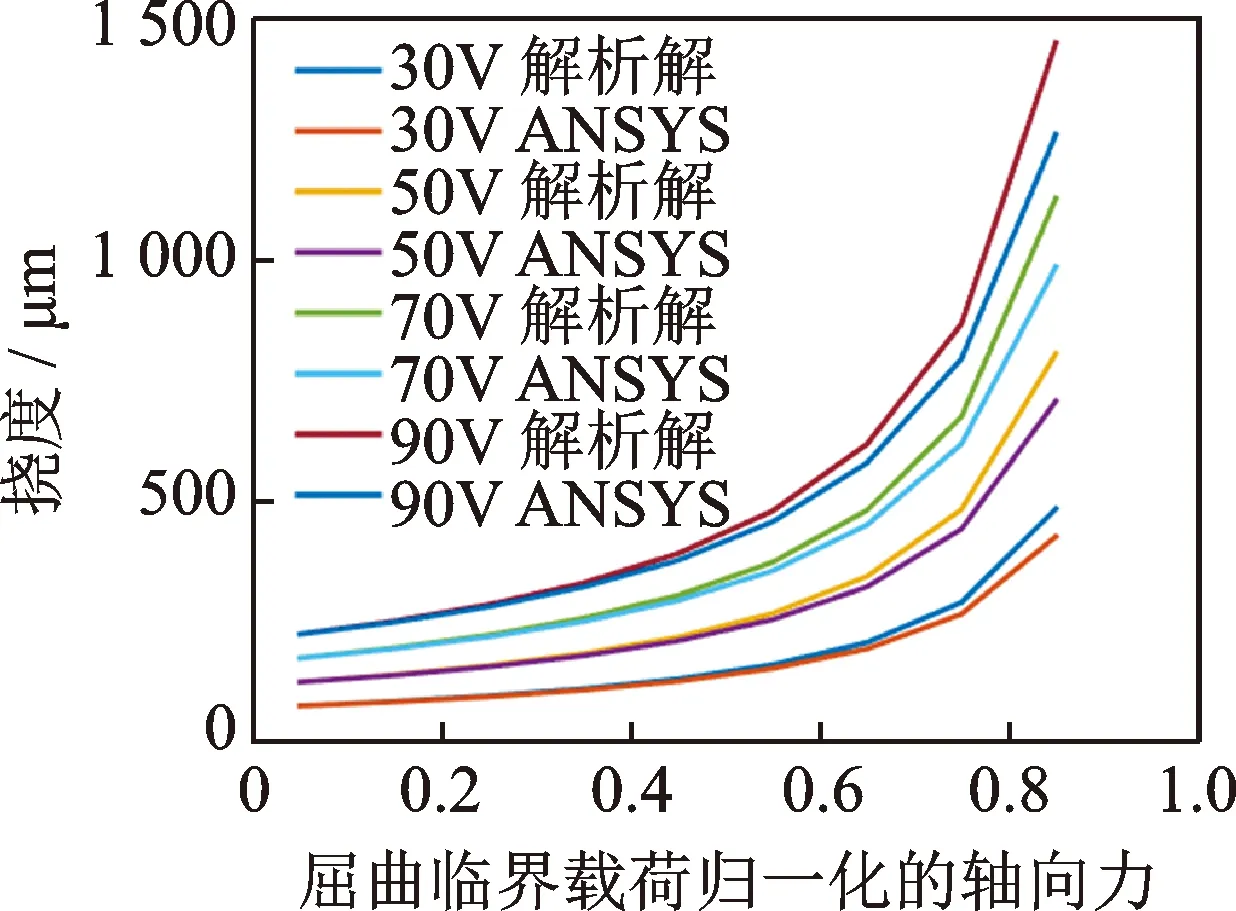
图2 不同电压下轴向力与双晶片最大挠度的关系Fig.2 Relationship between the deflection and the axial force at different voltages
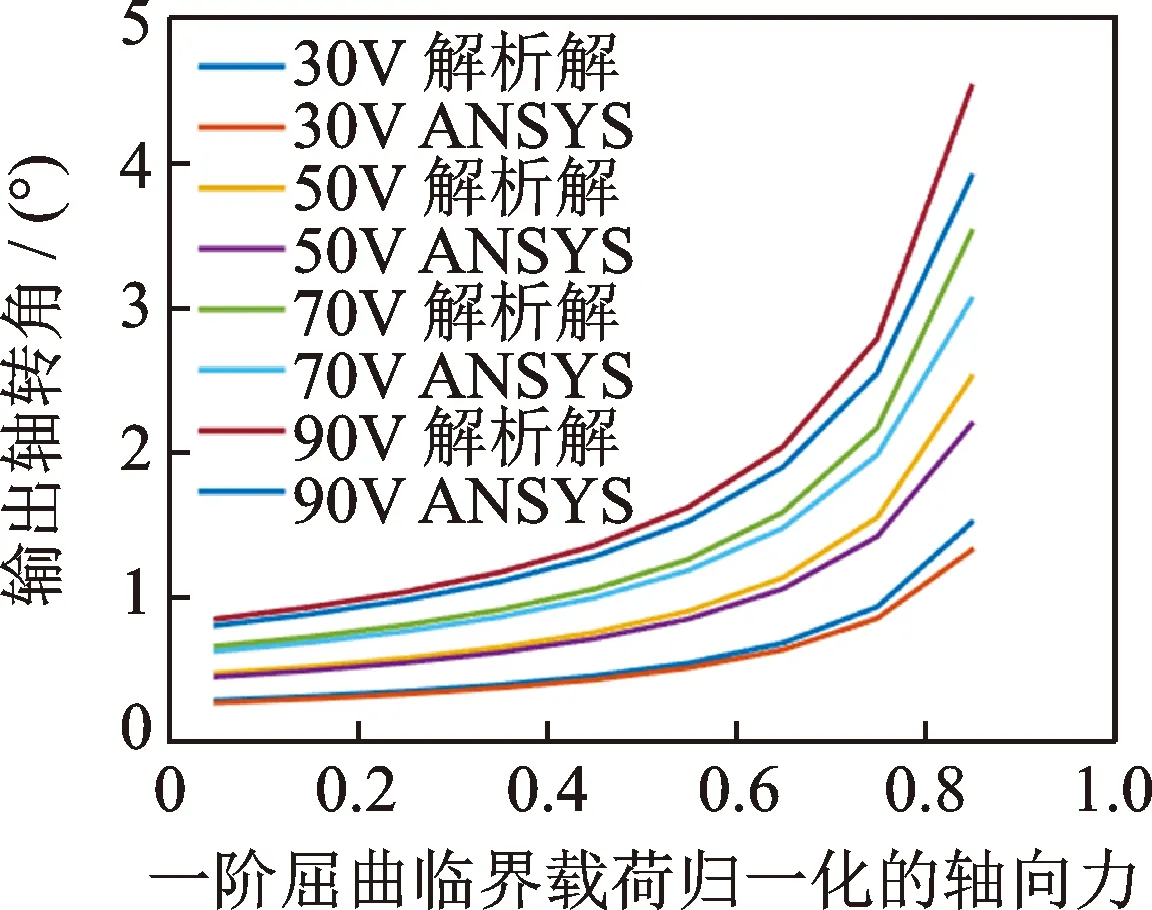
图3 不同电压下轴向力与双晶片输出转角的关系Fig.3 Relationship between the output angle and the axial force at different voltages
从图2、图3中的结果可以看出,ANSYS计算结果模型与解析解计算结果趋势上基本一致。小轴向力下两者相差很小,由于本研究的理论模型采用了小变形假设,随着轴向力的增大计算误差会越来越大,但趋势是一致的。另外,理论模型中近似地认为沿压电陶瓷厚度方向电场强度均匀分布也会引起一定的误差。增大轴向力对双晶片的输出位移有明显的放大作用。为了给预压力施加部分的结构设计提供理论依据,图4给出简支双晶片滑动端x向位移的计算结果。
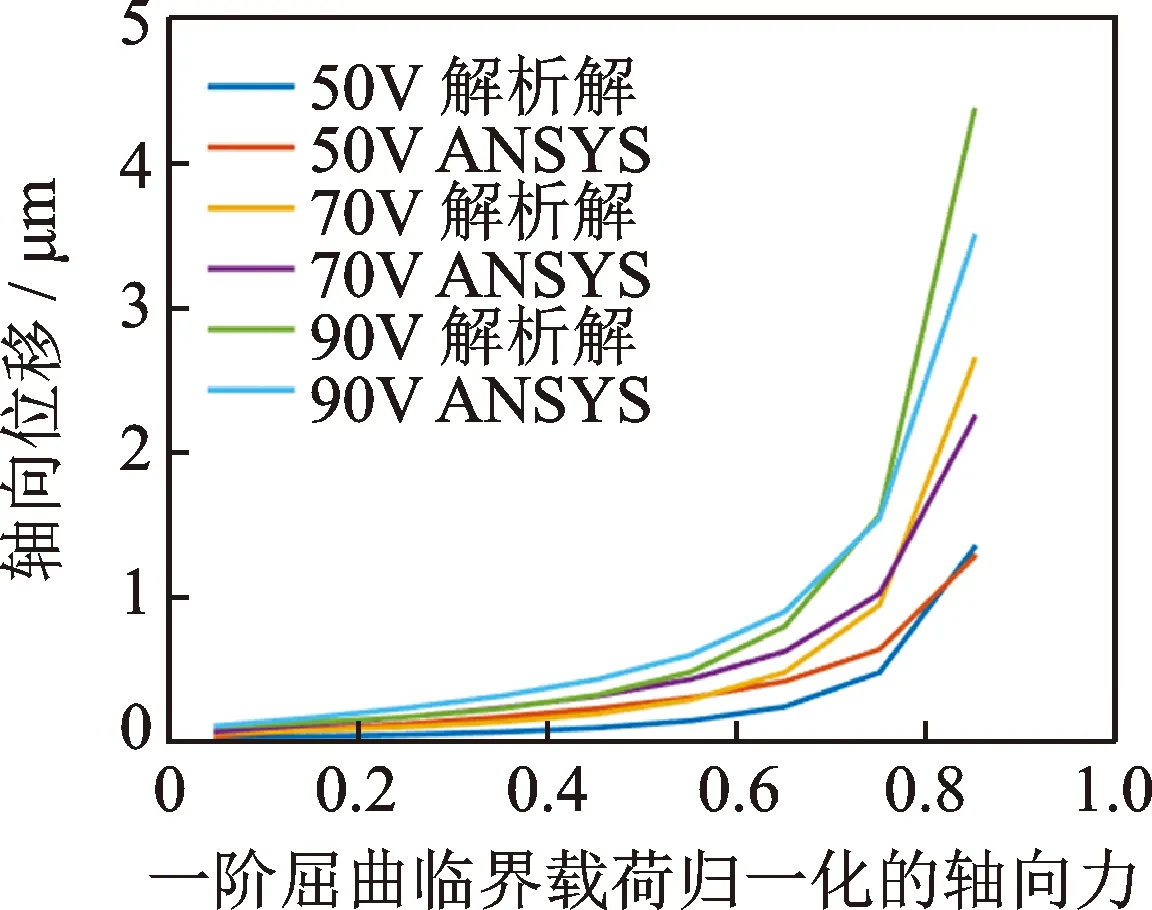
图4 简支双晶片的轴向刚度特性Fig.4 Axial stiffness characteristics of the Bimorph
从图4可以看出,简支双晶片的轴向刚度在0~0.4倍的屈曲临界载荷下基本呈线性,在大轴向力下呈明显的非线性,随着轴向力的增大,双晶片刚度渐软,理论上当轴向力达到屈曲临界载荷时双晶片的轴向刚度将为零。
从上面的仿真结果可以看出,轴向力对双晶片的静态位移输出能力有明显的放大作用,较大轴向力下双晶片的轴向刚度呈现明显的非线性。通过与ANSYS计算结果的比较也证实了本研究的理论分析结果在较小轴向力下是基本正确的,大轴向力下(接近屈曲临界载荷)理论计算结果与ANSYS仿真结果趋势上基本一致。
2.2 驱动器的动力学特性
通过模型的理论分析给出了在轴向力及电压的作用下双晶片的结构动力学特性表达式,得到了简支边界条件下双晶片的固有频率、固有振型及幅频特性的解析表达式。通过式(25)计算出双晶片的固有频率,并与ANSYS预应力模态分析结果放在一起进行比较,在ANSYS软件静力学分析设置中打开大变形选项,结果如图5所示。
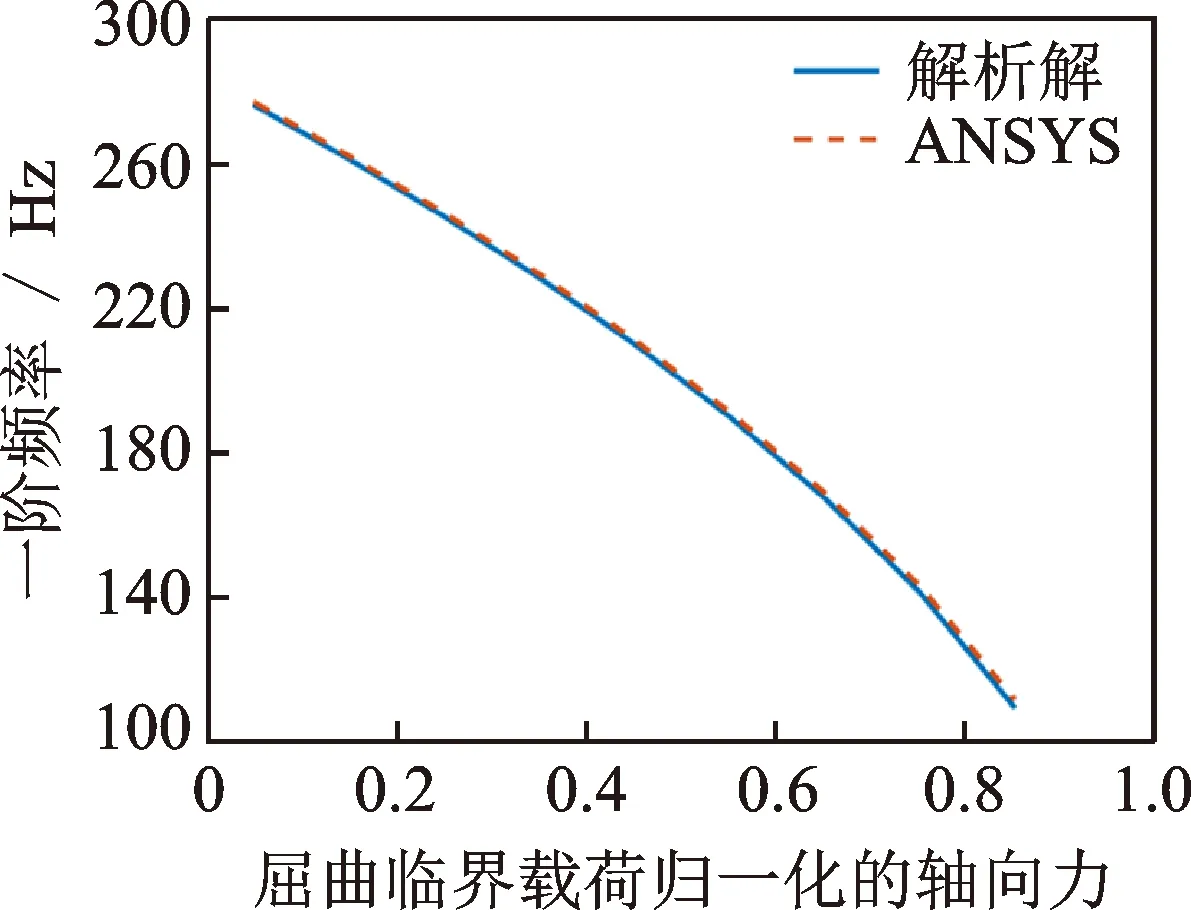
图5 与简支双晶片一阶弯振频率的关系Fig.5 Relationship between 1st bending frequency and the axial force at different voltages
在式(29)~(33)中,令x=L/2,计算出双晶片的稳态响应与ANSYS预应力下谐响应计算结果如图6所示。在ANSYS中进行有预应力的谐响应分析,首先,进行静力学分析计算结构的预应力,添加铰支边界条件,在滑动铰支端对双晶片施加轴向力,分析设置中打开大变形选项;其次,将静力学分析的结果导入模态分析,通过模态叠加法进行谐响应分析。谐响应分析中,在双晶片两端施加等效弯矩(相当于施加1V电压引起的弯矩),计算得到简支双晶片在不同轴向力作用下的幅频特性曲线。
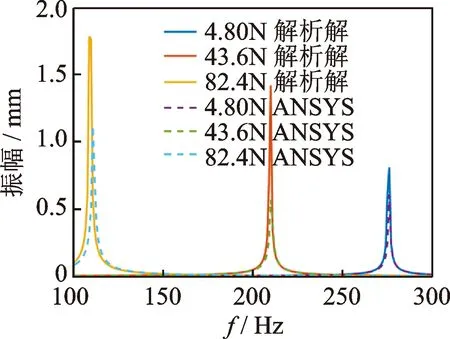
图6 简支双晶片1V电压下的幅频特性Fig.6 Amplitude-frequency characteristics of bimorph under 1V voltage
3 可调轴向预紧力的双晶片实验研究
3.1 双晶片的静态实验
为了测试舵机用双晶片的静态特性,设计并制作出实验装置如图7所示。双晶片左侧嵌入到固定铰支端即输出轴上,右侧嵌入到滑动铰支端,滑动端与底座上的导轨相连,通过砝码给双晶片施加轴向力,利用激光位移传感器测量双晶片中点挠度。通过给双晶片施加直流电来测试双晶片的静态挠度,实验结果与解析解计算结果如图8所示。从图中可以看出,轴向力在一定程度上能够放大双晶片的输出位移,而且双晶片的挠度对电压有较好的线性度。
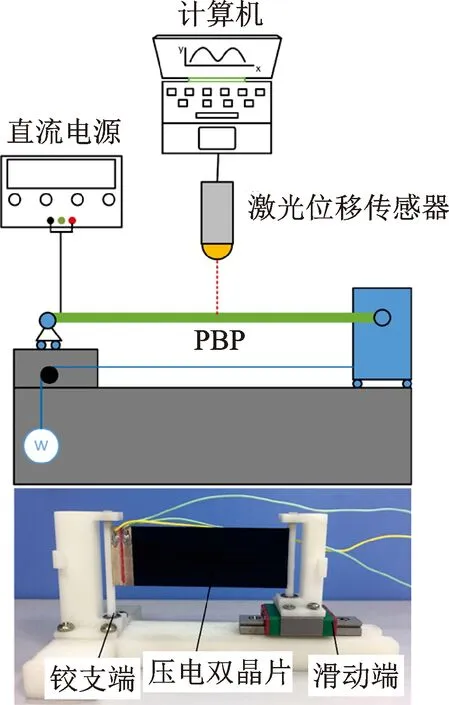
图7 轴向预压缩简支双晶片实验装置Fig.7 Experimental device for axial pre-compressed piezoelectric bimorph
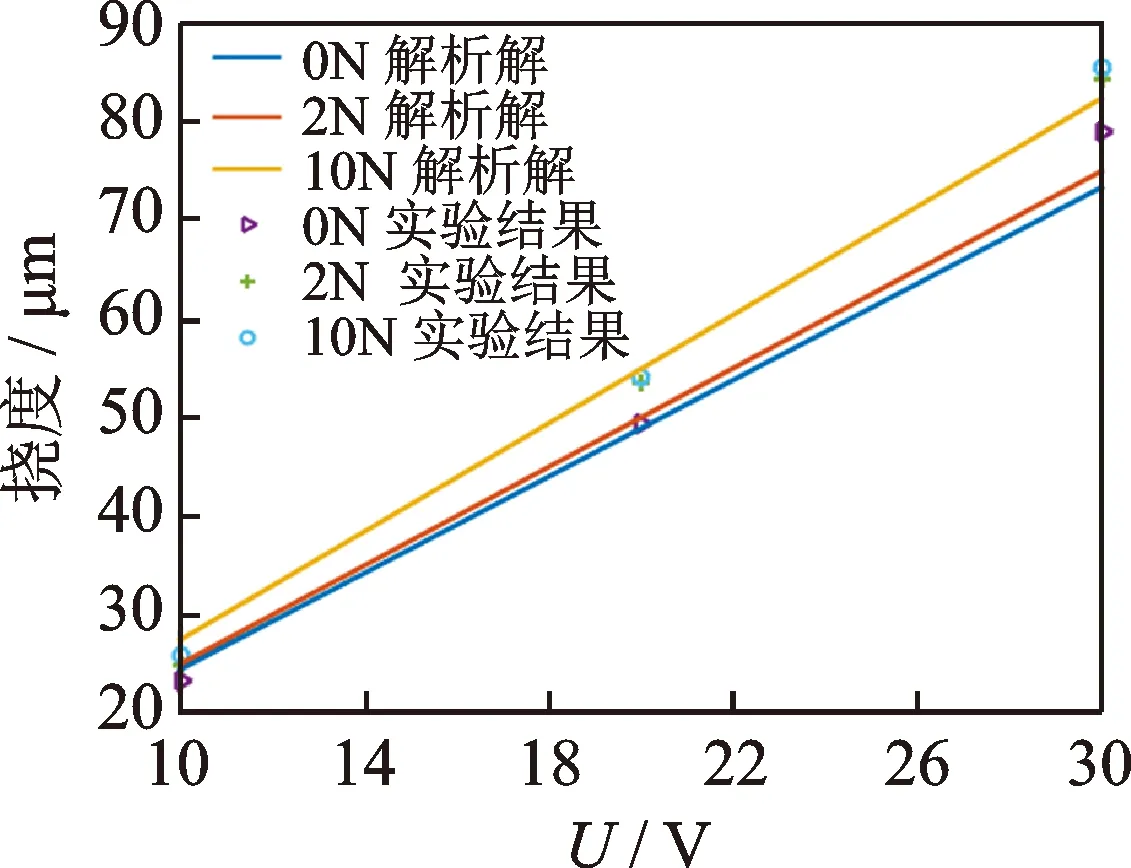
图8 不同轴向力及电压下简支双晶片的最大挠度Fig.8 Maximum deflection under different axial force and voltage
3.2 双晶片的瞬态实验
双晶片的瞬态特性主要指其启动与关断时表现的特性。笔者用双晶片的阶跃响应实验来测试其瞬态特性。给双晶片施加低频(0.2Hz)的方波信号(向上偏置100%),利用激光位移传感器测量其阶跃响应,得到双晶片在启动与关停时响应的时间历程。双晶片应用于舵机要有一定的带宽,否则无法及时响应飞控系统给出的控制信号。因此,进行双晶片的瞬态特性实验具有重要的理论与现实意义。
采用之前给出的双晶片与图7中的实验装置测量简支双晶片的瞬态响应。图9给出双晶片轴向力为零、电压幅值为10V时的阶跃响应,横坐标为时间,纵坐标为激光位移传感器测量得到的位移(绝对值),采样频率为20kHz,激励电压为0.2Hz,占空比为50%。从图中可以看出,双晶片的响应时间非常快(毫秒级),而双晶片在启停时会出现较大的位移峰值。
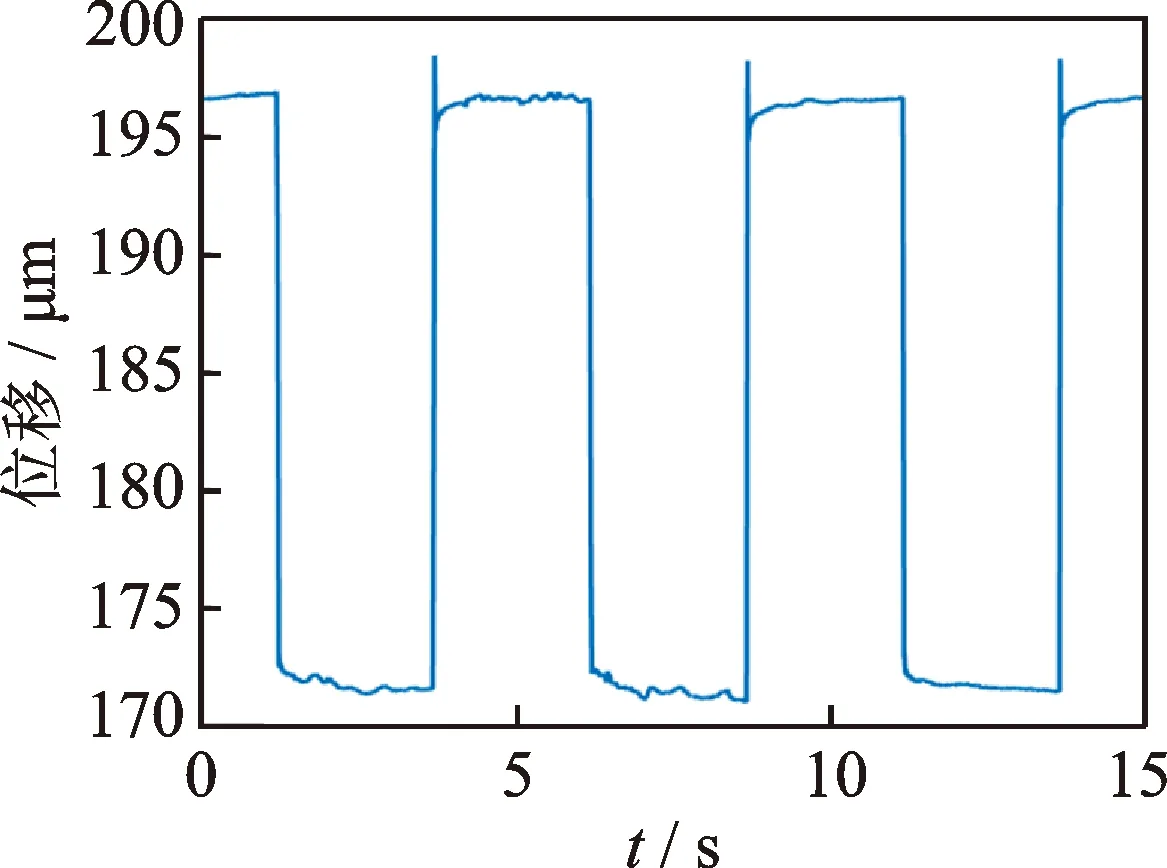
图9 无轴向力下简支双晶片的阶跃响应Fig.9 Step response of bimorph without axial force
作为比较,其他条件相同,测出双晶片在轴向力10N时的阶跃响应,测量结果如图10所示。从实验结果中可以看出,双晶片在大轴向力下仍然有着毫秒级的响应时间,且双晶片在启动时的位移峰值消失。有10N轴向力的情况比无轴向力的情况振幅放大了20%左右。
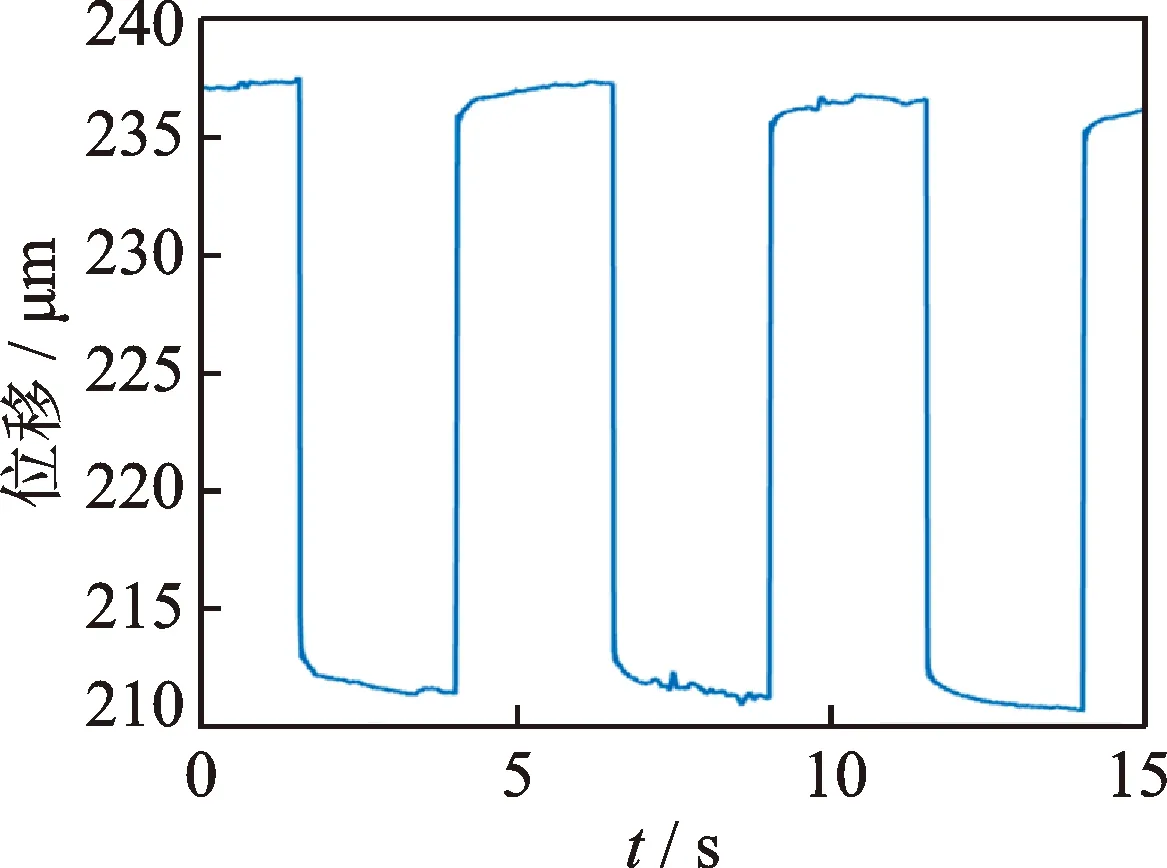
图10 10N轴向力下简支双晶片的阶跃响应Fig.10 Step response of bimorph under 10N axial forces
4 结束语
笔者基于Hamilton原理,由欧拉梁的假设(另外假设压电陶瓷电场沿厚度均匀分布)建立轴向受压双晶片的动力学模型,给出双晶片的动力学方程(可简化为静力学方程)与边界条件。得出轴向预压缩双晶片在简支边界条件下的静态特性(不同轴向力不同电压下的最大挠度)、幅频特性、固有频率、固有振型及屈曲临界载荷的解析解表达式。利用ANSYS软件建立双晶片的简化模型,进行静力学、模态与谐响应分析,将理论计算结果与ANSYS仿真结果进行比较,验证理论分析的正确性,增加理论分析结果的可信度。搭建双晶片实验平台,进行不同轴向力下双晶片的静变形实验与瞬态实验。分析理论计算与实验结果,发现增大轴向力能够明显地放大双晶片的静变形,同时降低双晶片的一阶弯振频率,在大轴向力下双晶片仍然有很高的带宽,响应时间仍然为毫秒级,与传统的电磁伺服系统相比优势明显,具有广阔的应用前景。