TBO模式下终端区进场交通流优化模型与仿真分析
2020-07-30张洪海汤一文许炎
张洪海,汤一文,许炎
1. 南京航空航天大学 民航学院,南京 211106 2. 克兰菲尔德大学 航空中心,贝德福德郡 MK430AL
繁忙机场终端区是当前空中交通管理的一个重要瓶颈,其原因来自物理和运行层面。在物理层面上,终端区地侧有限的登机口、跑道数量和机场布局以及空侧的进离场航线网络构型等在一定程度上形成了限制[1];对于运行层面,终端区涉及众多的参与方,如塔台、场面管制、航空公司(运控及机组)等,各参与方之间缺乏高效的协调机制以及在此机制上的综合控制技术和决策辅助工具。
为应对上述运行层面的问题,机场协同决策机制率先被国外学者提出[2-3],并在成功实践的基础上,将该机制逐步衍生为更普适的基于航迹运行(Trajectory-Based Operation,TBO)的概念[4-5],涉及的管理范围从机场终端区拓展至“门到门”的整个飞行历程,作用的时间尺度也从实时阶段扩大到数日(甚至数月)前的计划阶段。总体而言,TBO的核心理念在于从当前以航班计划及航空器位置为基准的粗放管控方式,转变为以实时更新的四维飞行航迹预测及航空器精确控制过点时间为基准的精细化管理模式,并在该过程中围绕四维航迹,实现各方之间的协同。
国内外学者针对这一领域已展开了积极探索,四维航迹的研用奠定了TBO模式的基础[6-8]。文献[9]对TBO长期发展规划进行了梳理和总结。文献[10-11]通过比较随机性和确定性排队模型的延误预测,揭示了TBO在航迹准确性方面的优势。文献[12]总结了NextGen飞行管理系统运行概念及体系结构,建立了用于该系统生成并优化四维航迹的数学模型。文献[13]提出了TBO模式下协同流量管理方法并进一步与动态空域规划相结合。
此外,部分研究虽未直接着眼于TBO模式,其成果依然可以为之借鉴,如文献[14]发掘了空中交通流的5个演变相态,分析了交通流相变规律。文献[15]建立了终端区交通流微观模型及诱导规则,引导航空器自主选择路径进场。类似地,文献[16]结合航空器性能及航路节点繁忙程度引导航空器直飞。文献[17-18]建立了多排序边融合点进场模型,提高了繁忙机场终端区的进场交通流运行效率。文献[19]利用整数规划提出了控制滑行路径点的场面滑行优化方法。
本文结合TBO模式的相关概念,针对截点直飞进场方式和融合点进场方式分别建立了数学优化模型,揭示了2种进场方式在TBO模式下进一步提高运行效率、确保运行安全的效果,并通过后续仿真实验及优化后的交通流特性分析,验证了2种模型的正确性和有效性。探索了TBO概念在终端区进场空中交通管理方面的应用,为今后繁忙终端区交通流研究及TBO模式在终端区内的实际运行提供了理论基础和方法支持。
1 TBO模式下截点直飞进场优化模型
1.1 模型介绍
在TBO概念中,航空器可以在一定范围内灵活调整航迹[20],以达到提高交通流运行效率及空域利用率的目的。在此基础上,根据法国戴高乐机场终端区实际运行环境以及公布的标准区域导航(RNAV)进场程序、标准仪表进场程序等,构建了TBO模式下截点直飞进场航线结构,如图1所示。
由北侧进场程序起始点(DPE、MOPIL、VEDUS)进入的航空器可以根据当前航路繁忙程度,在与其他航空器无冲突的前提下选择不同的航路截点直飞进场,如图1中各虚线所示,并在雷达引导下经由规定导航点降落在计划跑道27R。同理,由南侧进场程序起始点(KEPER、DJL、TINIL)进入的航空器,根据该侧航路的运行情况选择截点及其对应航路运行,并经由规定导航点后降落跑道26L。
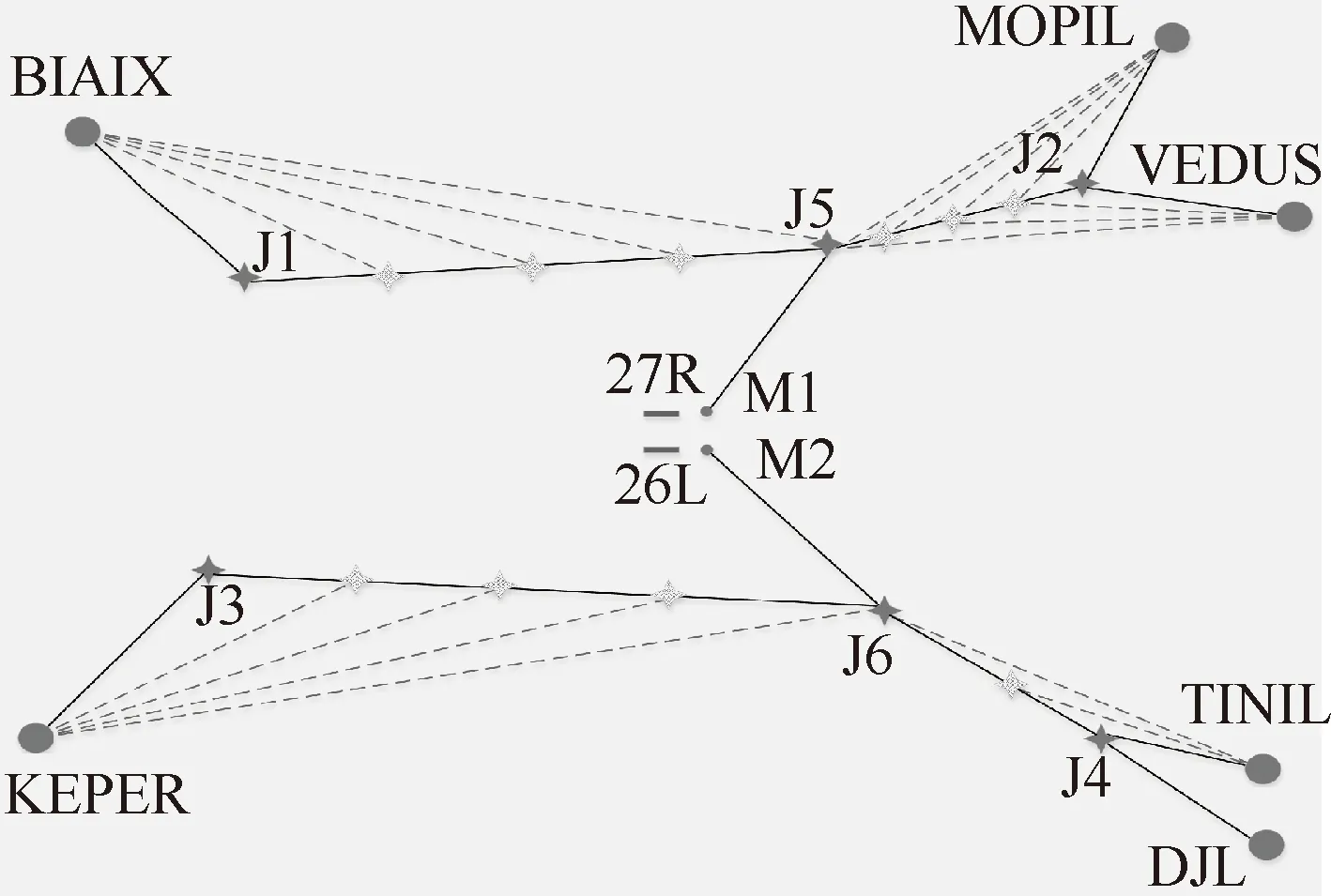
图1 截点直飞方式进场航路构型Fig.1 Route structure of short-cut direct fly arrival model
此外,模型中控制点的选取是基于机场终端区航图中公布的定位点分布,并通过利用航班计划中的常用位置点对这些点进行筛选,最后得到上述一系列关键的进场定位点,从而设定为模型中的控制点。
考虑到实际运行过程中,空中与场面之间并非完全独立,而是存在相当程度上的资源共享,如共用跑道、滑行道等,因此,空中会受到场面上公共资源容量的制约;其次,机场场面部分所产生的延误也会在一定程度上影响进场交通流。为使模型更贴近实际,同时为突出研究重点,本文对涉及的场面运行进行了简化,图2为戴高乐机场场面示意图。一方面,针对场面资源,仅保留基于历史数据筛选出的最常用登机口、滑行道及跑道端等;另一方面,简化场面运行过程,仅考虑进、离场航空器按指定滑行路径在特定停机位至跑道端之间的运行,其中包含跑道穿越。
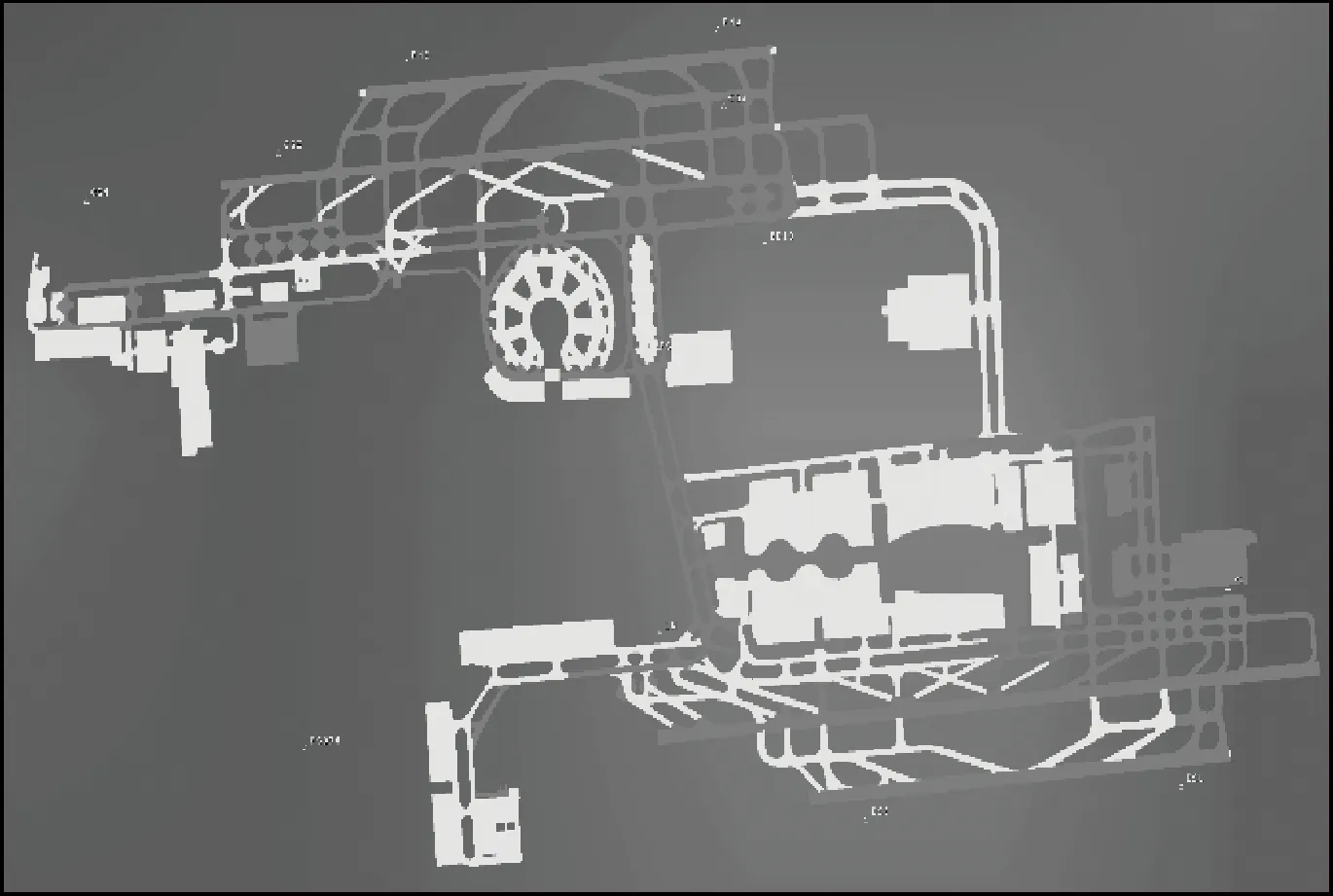
图2 巴黎戴高乐机场场面结构图Fig.2 Surface structure of Charles de Gaulle Airport
1.2 数学建模
1.2.1 决策变量


表1 航空器到达状态2种定义方式的区别
1.2.2 优化模型
模型的目标函数及约束条件如式(1)~式(14)所示:
min(Arrcost+λDepcost)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)

式(6)规定了航空器在终端区内航迹的选择有且只有一条,Kf表示特定航班的可选路径集合。



(xn-xn-1)+(xn-1-xn-2)+…(x2-x1)=
xn-xn-1
可以看出,相比于“t时刻恰好到达”,该定义方法可显著压缩模型的大小,有利于提高求解效率。表2进一步直观说明了该约束条件的作用原理。式(13)和式(14)对模型中决策变量的取值范围进行了阐述,并声明服从0-1变量。
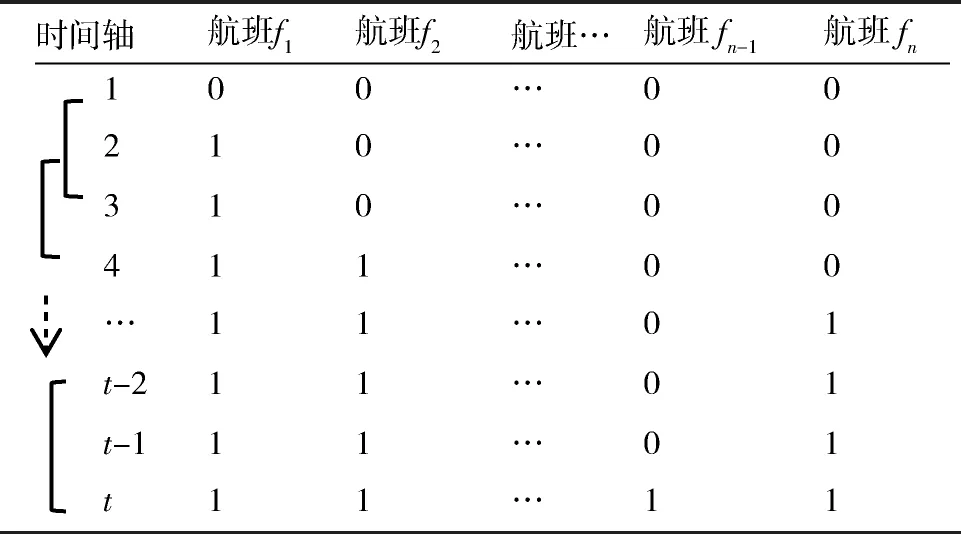
表2 决策变量取值与约束条件之间的联系
2 TBO模式下融合点进场优化模型
2.1 模型介绍
根据融合点进场方式基本规则[21]及戴高乐机场终端区实际运行环境和公布的标准RNAV进场程序、标准仪表进场程序等,构建了TBO模式下融合点方式进场交通流优化模型。融合点为终端区内的定位点,一般情况下位于最后进近定位点附近,具有汇聚多方向进场交通流的作用。
进场航空器脱离排序边后直飞融合点,并在通过该点之后按顺序沿规定路径进近后着陆。排序边是终端区内的一条弧形航路,一般情况下该航路上任意一点到融合点间的距离近似相等,基本进场构型如图3所示。排序边具有整合上游进场交通流,延伸或缩短航空器飞行及等待航段长度等作用,其数量由交通流量及空域内航空器尾流类型确定,如图4所示。
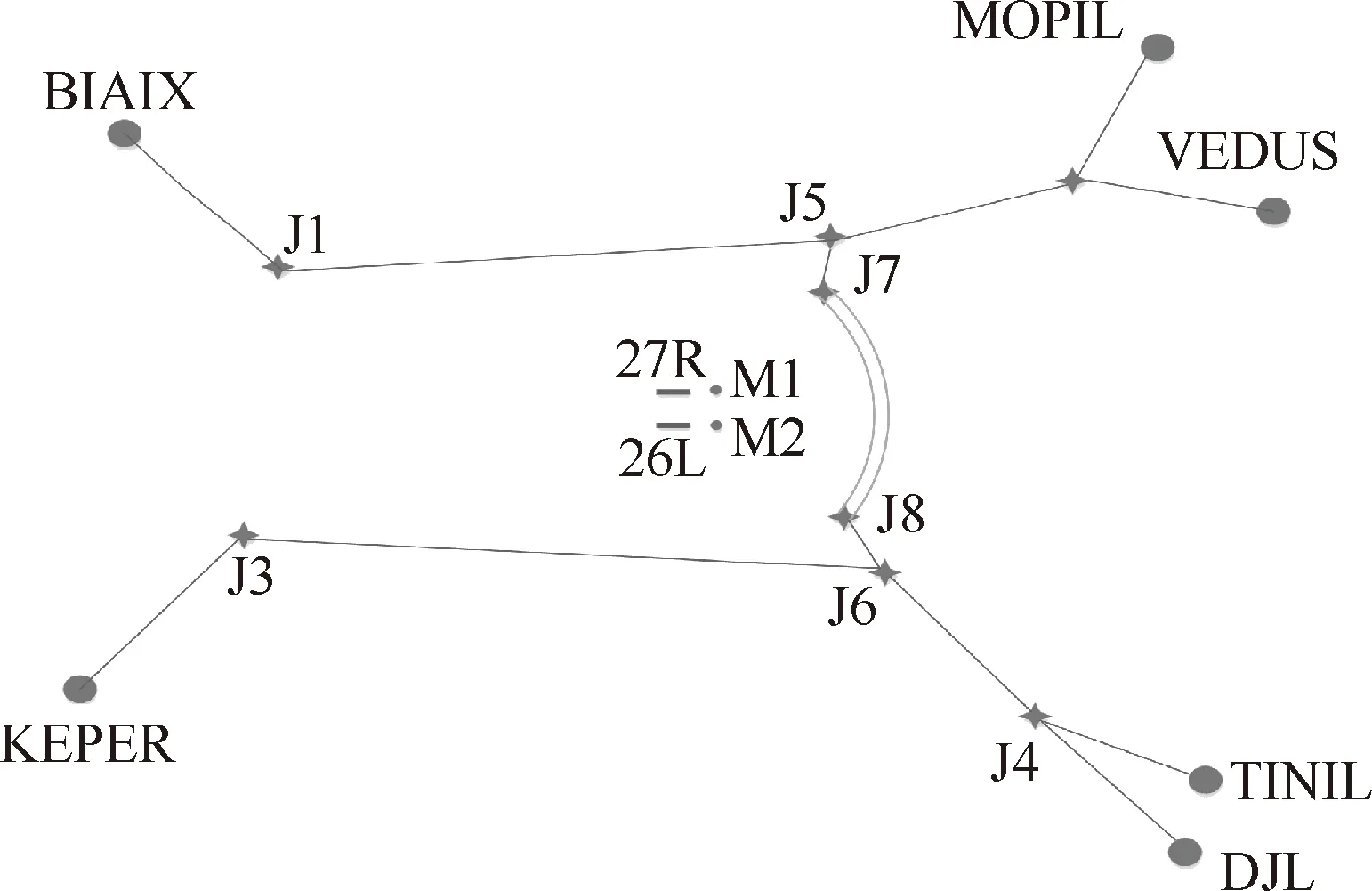
图3 融合点方式进场航路构型Fig.3 Route structure of point-merge arrival model
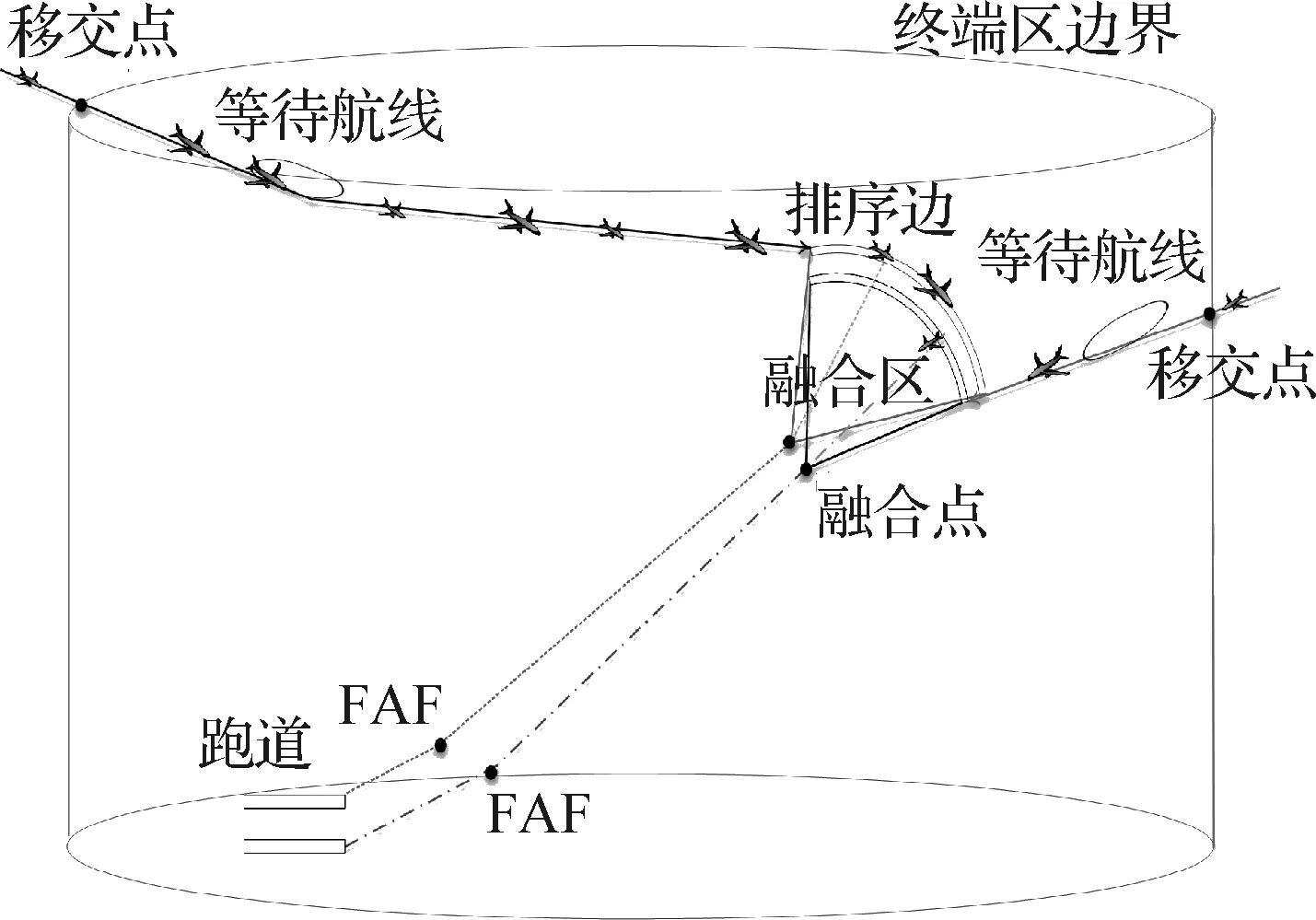
图4 融合点方式进场排序边示意图Fig.4 Sequence leg structure of point-merge arrival model
航空器在加入排序边后,依照管制指令适时脱离排序边并直飞至融合点。融合区作为由融合点及排序边组成的进场交通流运行区域,一般情况下其大小根据排序边长度及高度确定。在融合区内运行的航空器之间保持一定的安全距离,依次直飞至融合点。
综上所述,航空器经由进场程序起始点进入终端区后,沿进场航线飞至排序边起点;加入排序边后,航空器自主沿排序边飞行并与前后机保持安全间隔,并根据下游航路交通情况适时脱离排序边并直飞至融合点;航空器在融合区内飞行时保持一定的下降坡度连续下降,并与其他航空器保持安全间隔。现代航空器的机载飞行管理系统(FMS)可对融合点程序进行预编码,有利于在排序边上运行的航空器快速调整飞行姿态等,管制员从而仅需向航空器发出“转弯”“直飞”及必要的管制指令,从一定程度上降低了管制员工作负荷。
2.2 数学建模
2.2.1 决策变量
定义qf为各进场航班f在排序边上的飞行等待时长。
2.2.2 优化模型
模型的目标函数及约束条件如式(15)~式(32) 所示。
min(Arrcost+λDepcost)
(15)
(16)
(17)
(18)
(19)
(20)
Jf,j′=j+1
(21)
∀(j,j′)∈Jf,j′=j+1
(22)
∀(f,f′)∈Fj,f≠f′
(23)
(24)
(25)
(26)

(27)
(28)

(29)
(30)
(31)
qf∈[0,n],∀f∈Farr
(32)

最后,决策变量的范围及0-1变量的声明在式(29)和式(32)中明确。
3 仿真实验及结果分析
3.1 仿真实验
3.1.1 实验设计
为验证上述2种模型的有效性,本文设计如下仿真实验,总体框架与流程如图5所示。实验主要包含4项基本步骤,分别为实验数据、数学建模、优化求解与结果分析。首先,通过处理原始飞行计划与雷达轨迹数据,得到各进场航班在终端区入口处的计划过点时间,各离场航班的计划起飞时间,以及场面滑行的主要路径等,之后经由BlueSky仿真平台模拟生成TBO模式下各航班的飞行计划;接着,将该飞行计划作为模型的输入,利用GAMS工具进行优化建模,将数学模型转化成线性优化矩阵;然后,调用线性优化求解器Gurobi对矩阵进行求解,即在飞行计划中预计过点时间的基础上,生成优化后的控制过点时间;最后,将调整后的飞行计划重新输入BlueSky仿真平台,将时间离散的过点约束条件转换成近似连续的实时运行参数,从而便于收集飞行状态数据,用于后续交通流时空特性分析。
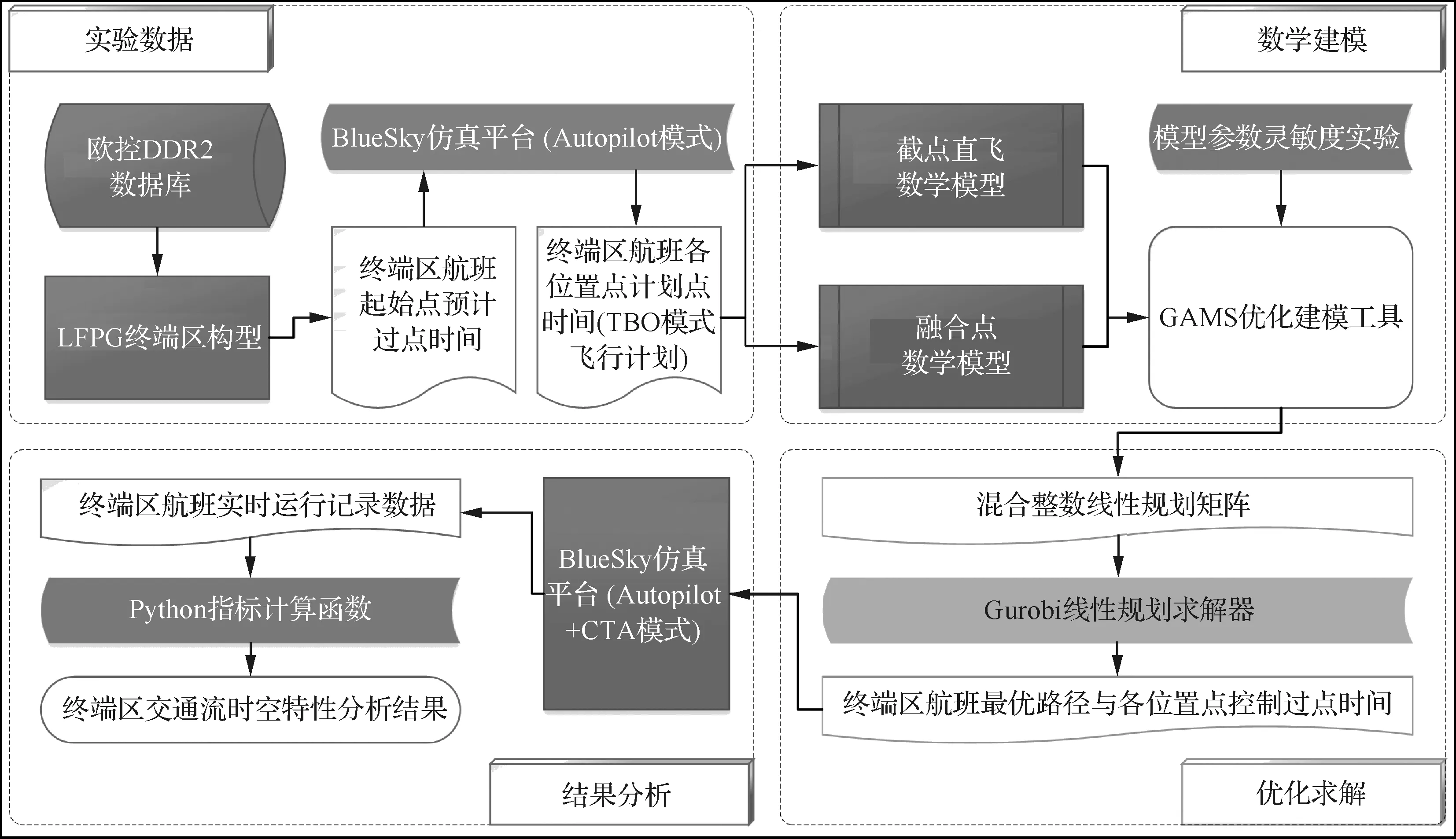
图5 仿真实验总体框架与流程Fig.5 Overall frameworks and processes of simulation experiment
此外,本文还考虑了针对传统运行模式进行的仿真实验,并将其与提出的TBO模式下的优化模型进行对比。该传统模式是在保持本文现有模型建模思路的前提下,尽可能模拟实际运行中的传统空中交通管理方式。即以控制过点时间作为间隔管理的手段,航空器沿原计划航迹飞行,且仅能在特定等待位置点或航段进行空中等待或雷达引导,也就是近似传统运行的进场方式。
3.1.2 数据来源
实验飞行计划数据来源于欧洲Eurocontrol公布的DDR2(Demand Data Repository Version 2)数据库。选取2017年2月20日戴高乐机场终端区繁忙时段(上午6时至中午12时)历史飞行计划,进场交通流示意图如图6(a)所示。6 h内包含进场航班229架次,离场航班233架次。对于机场场面运行,图6(b)显示当日戴高乐机场完整雷达记录航班轨迹数据(仅场面部分),蓝色和绿色点迹分别代表进场和离场轨迹。由上文可知,考虑到本文研究重点,对场面上进离场航班运行简化后得到流量较大的4条滑行路径,即图6(b)中红色和黄色标记的路径,其中各包含对应跑道穿越处的潜在冲突位置点。
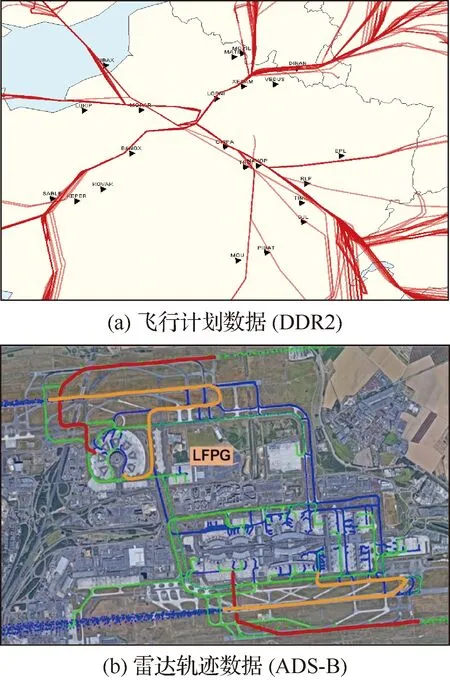
图6 仿真实验原始数据示意图Fig.6 Source of raw data for simulation experiment
经统计,上述462架次航班中,约75%为中型机,25%为重型机,没有轻型机。由于融合点模型需考虑不同尾流类型航空器之间的动态间隔及进离场航空器跑道穿越的动态间隔,结合TBO概念中的基于时间的管理,将距离间隔通过航空器进场平均速度转化为时间间隔,如表3所示。
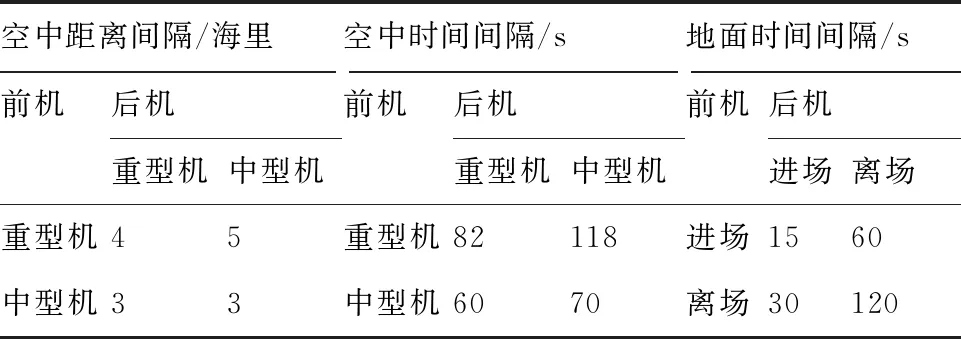
表3 航空器动态时间间隔
3.1.3 实验假设
实验对2种模型所涉及的一般性参数分别进行了假设,包括目标函数中的延误成本、额外燃油成本、进离场偏好比例等,还包括约束条件中的最大延误时间、不同类型位置点时间间隔标准等,如表4所示。除表中基本参数设置外,由于原始计划中航空器运行不受到管制干预及最低安全间隔限制,因此本文假设原始计划中的航空器飞行速度为最快进场速度,模型将不允许航空器以超过原计划速度进场。此外,2种优化模型允许航空器在除起始进近定位点至跑道端口着陆点之外的航段上以调速的方式吸收空中延误及化解航空器冲突。

表4 模型基本参数设置Table 4 Basic parameters in the models
对于航空器调速范围的设定,本文首先按照模型输入数据即原始航班计划,查找执飞的机型及其预计过点状态,匹配对应BlueSky航空器性能数据库中的机型及速度变化范围,然后根据该速度范围计算航空器的航段飞行时间变化范围,从而确定截点直飞及融合点模型的航段飞行时间系数,并以此作为约束条件生成优化后的控制过点时间。针对部分无法匹配的机型,本文假设最大调速范围为计划运行时间的1.1倍。
3.1.4 过程控制
在数据处理过程中,实验数据按时段分割将导致各时段连接处的部分航班信息中断。为最大程度上保证解的最优性,并降低优化求解计算复杂度,实验使用滑动时间窗的方法,如图7所示。
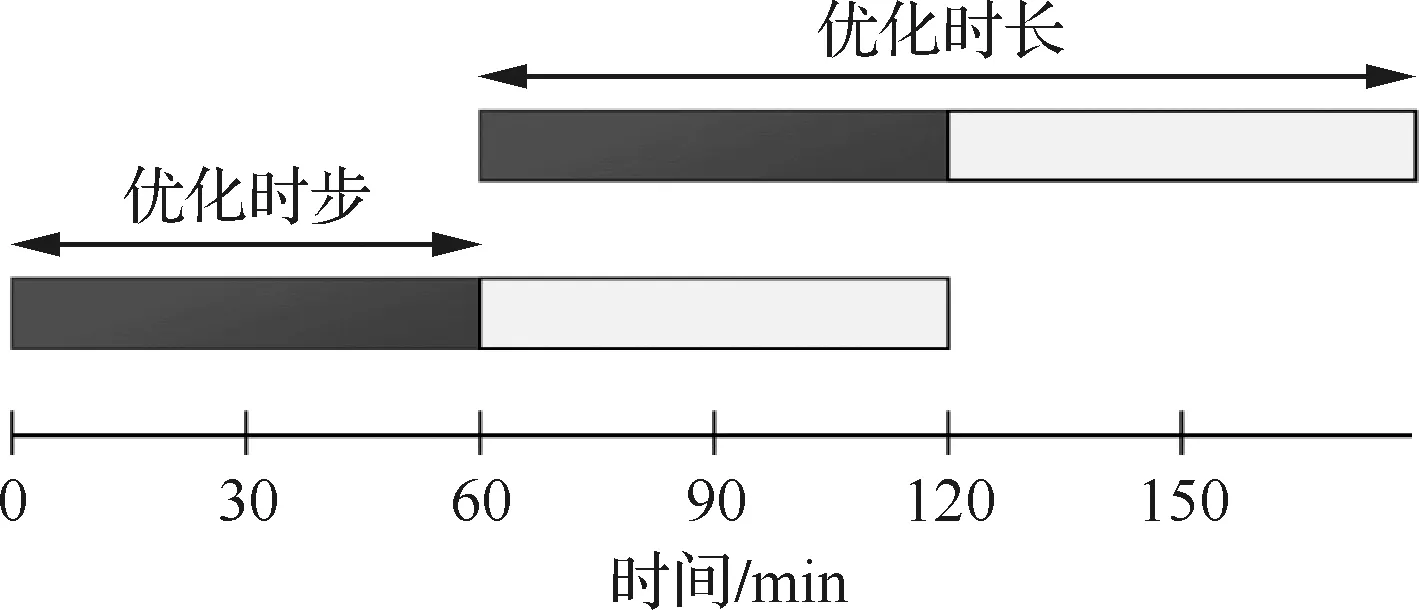
图7 滑动时间窗方法示意图Fig.7 Schematic of sliding window method
将进场航空器计划进入终端区的时间或离场航空器推出停机位的时间分割并设置优化时长为2 h,在每次求得优化结果后将该时间窗后移1 h(优化时步为1 h),迭代计算后最终求得可接受的模型次优解。
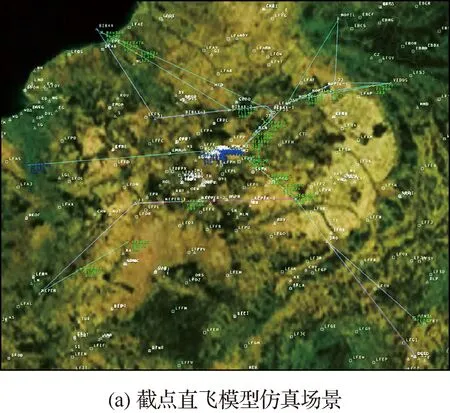
在实验过程中,首先提取DDR2数据中的航班信息。对于进场航空器,提取包括航空器进入终端区的进场程序起始点,到达该起始点的时间、速度、高度以及机型等;对于离场航空器,提取航空器预计撤轮挡时间,并随机分配离场跑道及其对应的场面滑行路径。然后根据图1和图3所示的终端区进场构型,搭建BlueSky仿真运行环境,如图8所示,展示了截点直飞方式与融合点方式在BlueSky中的仿真运行场景。
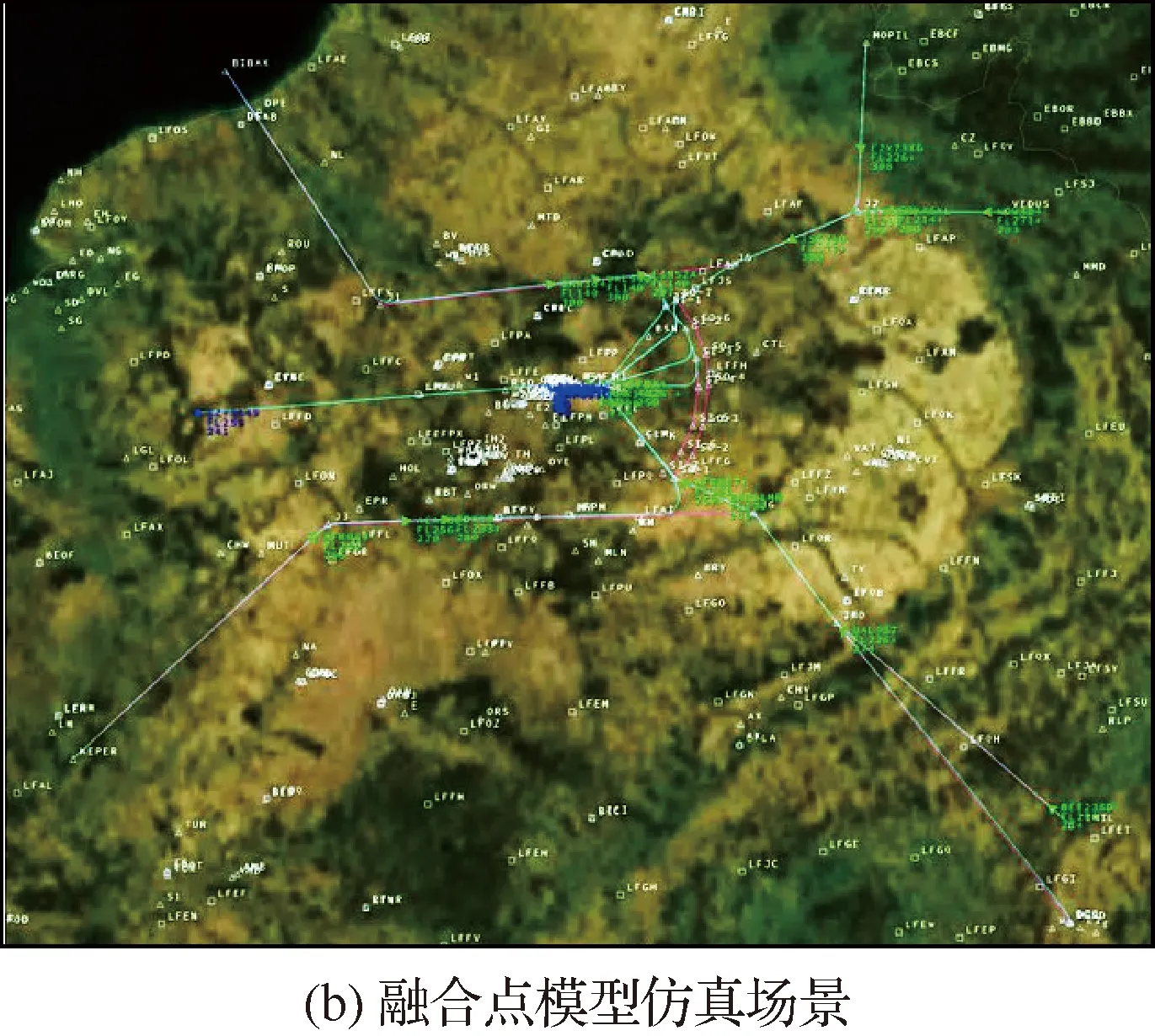
图8 根据模型构建的BlueSky仿真运行场景Fig.8 BlueSky simulation environment built based on the model
通过使用仿真平台的Autopilot模式,利用水平(LNAV)和垂直(VNAV)方向上的自主导航功能,生成航空器在终端区内各位置点的过点时间作为TBO模式下的航班计划。将航班计划带入模型中,通过优化建模工具进行求解。计算平台采用CPU为Intel Core i5-4570 四核3.2 GHz及8 GB内存。
3.2 结果分析
3.2.1 冲突分析
实验统计了终端区进离场航空器按原航班计划模拟运行后共47个位置点的冲突情况,如图9所示,冲突数量按经过同一点的相邻两航空器过点时间差小于特定时间间隔(空中设置90 s,场面30 s)的航空器数量统计。
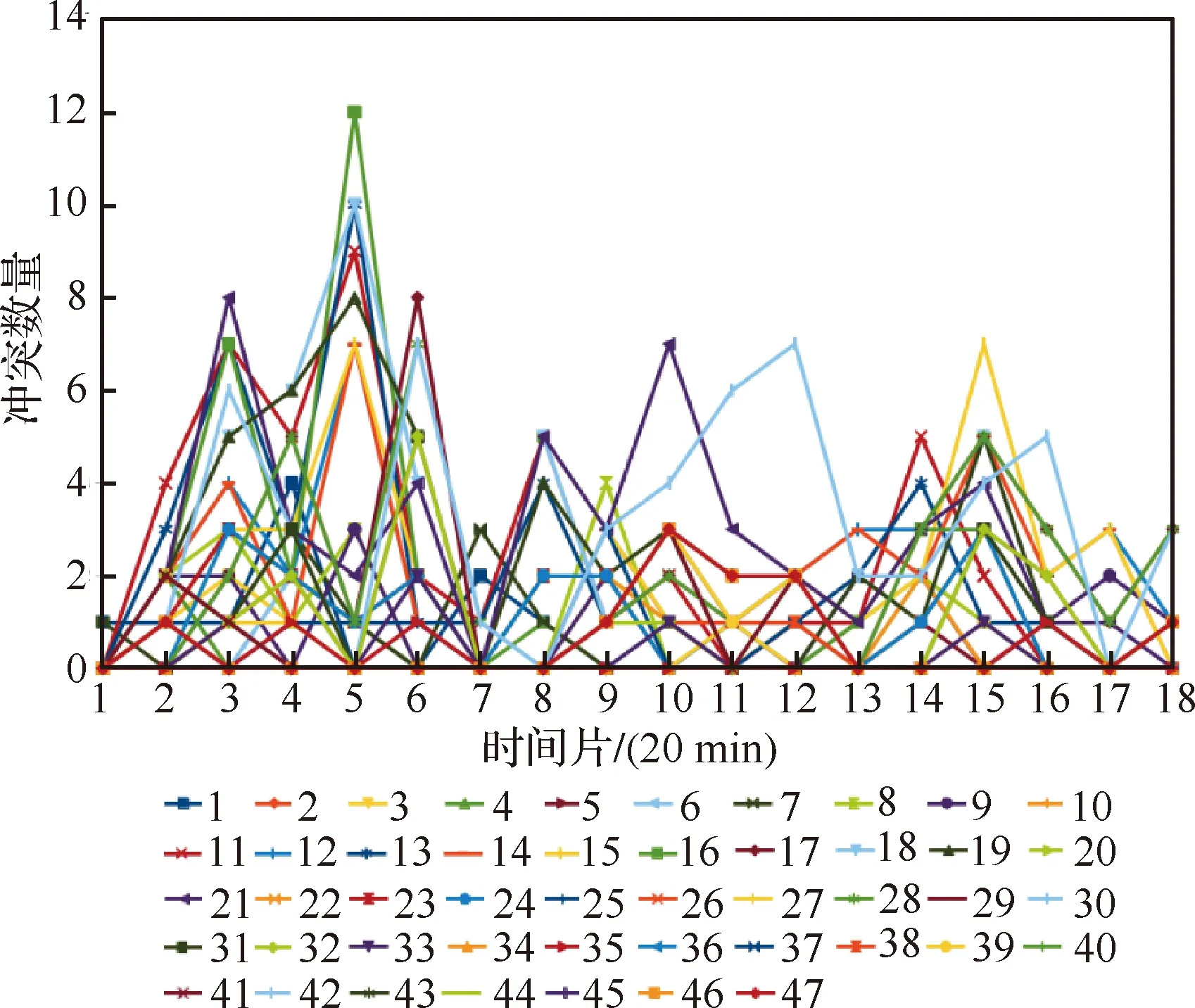
图9 仿真场景中飞行计划在各位置点处的冲突数Fig.9 Conflicts at each waypoint of flight plan scenario in simulation enviroment
根据统计,实验时段内共有855次冲突,且在第3至第6时间片尤为明显,其中最大冲突数出现在第5时间片的16航路点,该位置在20 min内共出现了12次冲突。此外航路点18、21处也存在大量冲突航空器。经过观察,上述位置点均为空中或场面上的交通流汇聚点,当单位时间内通过这些点的交通流量较大时,易造成航空器危险接近。3.2.2~3.2.4节将介绍TBO模式下2种模型的优化结果,通过合理分配延误及进场航迹等方式,为上述所有进离场航班实现了冲突解脱,并保证了关键位置点的交通流运行效率。
3.2.2 间隔分析
从航空器过点间隔分析2种模型的优化效果,同时加入近似传统运行的时隙分配结果进行对比,如图10所示。实验选取原始计划中有严重冲突的航路点及其对应时段进行分析,并挑选出畅通及拥挤交通流下的航空器组分别进行说明(图10中框选出的对象)。
对繁忙空中航路汇聚点进行分析,图10为近似传统运行方式、截点直飞模型及融合点模型优化前后的时隙分配结果,图中上下水平坐标轴分别为所选时段内原计划与模型优化后的航空器过点时间。垂直方向的连接线表示同一航班过点时间的变化,正常航班的连线为蓝色,在原始计划中有冲突的航空器及其连线用红色标亮。向右侧倾斜代表较之原计划有所延误,向左侧倾斜代表提前到达(仅适用于截点直飞模型)。
由图10可知,3种进场方式优化后的航班过点时均无冲突,且过点时间分布均匀。对比3组畅通流(左侧框)状态下的时隙分配结果,近似传统运行方式下90%的航班出现了延误,其主要由于受到上游冲突及延误的传递效应影响。对比2种 优化模型,经过截点直飞模型优化后的大部分航空器均比原计划提前过点,且没有航空器延误。同时,提前过点的航空器为后续航班释放了部分时隙,加速了整体进场交通流。融合点模型保证了大部分航空器按原航班计划时间到达。此外,由于采用动态间隔,其航空器过点间隔较前2种进场方式更小,有利于提高空域资源利用率。
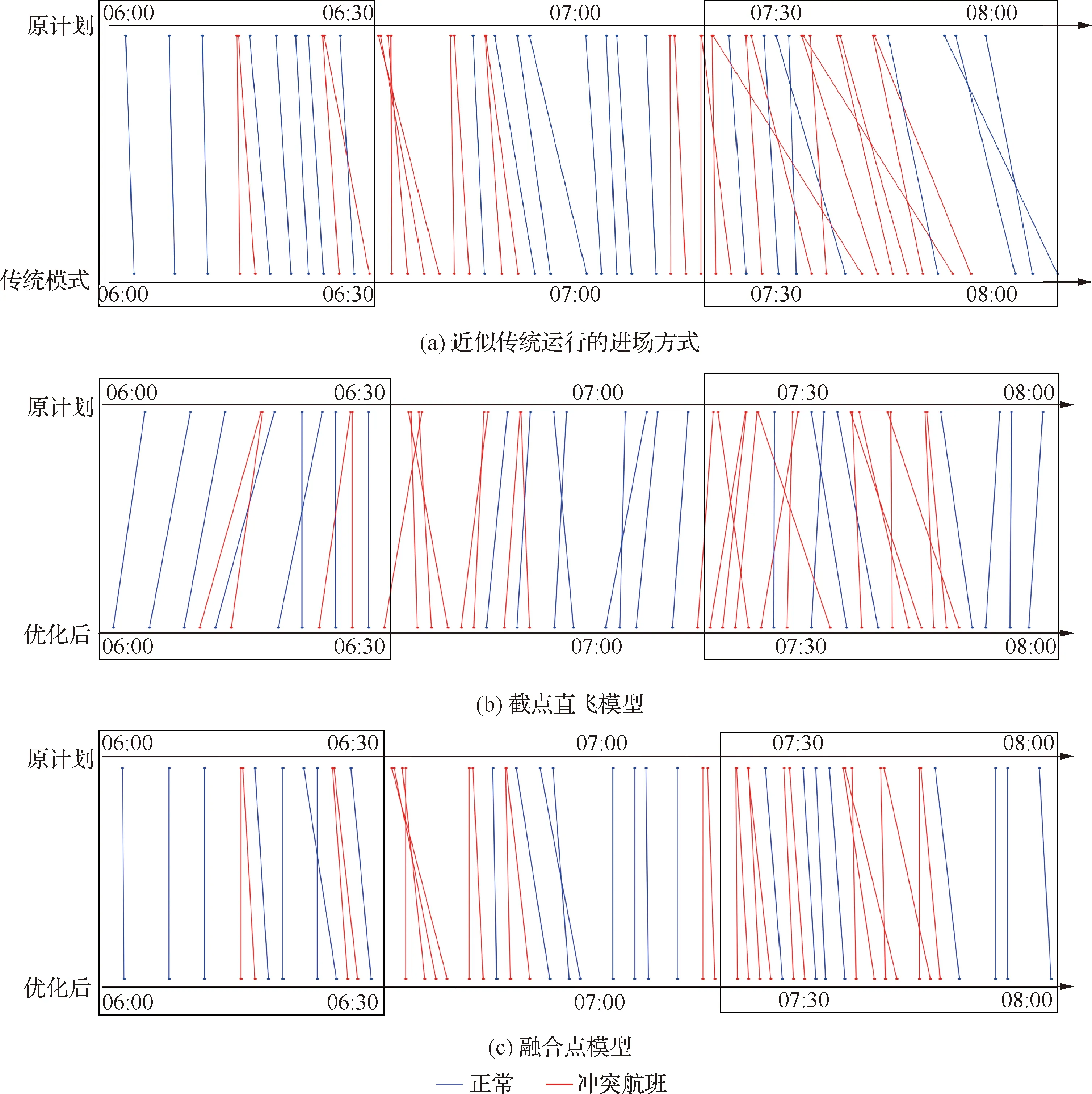
图10 近似传统运行的进场方式及2种模型优化前后的时隙分配结果Fig.10 Time slots rescheduling results of approximately traditional operation and two optimization models
对比3组拥挤流(右侧框)状态下的时隙分配结果,传统模式中全部航班被延误,部分航班延误超过30 min。此外,08∶00前后的无冲突航空器组与前序航空器间出现了较大时隙空隙,造成时隙浪费。对比2种优化模型,截点直飞模型优化后少量航空器被延误,大部分航空器提前过点,时隙利用率高,有效地提升了进场效率。对于融合点模型,其总延误时长最短,且交换航班顺序的次数最少,有效地保证了进场有序性。综上,在不同交通流状态下,截点直飞模型和融合点模型均有利于在保证进场航空器安全的前提下提高交通流运行效率。
3.2.3 延误分析
经过2种模型优化后的进场交通流延误情况及近似传统运行的延误情况如表5所示。表5左侧部分为截点直飞模型的延误结果,其终端区外延误为主要延误,且延误较大,主要是由航空器在进场起始点处的冲突及终端区由内向外传导的延误所致。从延误恢复时长可知,各时段均有大量航空器通过选择截点以较短的航迹进场,且有部分时段中的延误恢复值达到了10 000 s 以上。在直飞截点的作用下,各航班平均飞行时长较飞行计划减少了228 s,平均进场延误缩短为-3 s,体现了截点直飞模型对进场交通流的加速效果。
表5中间部分为融合点模型优化后的延误情况,融合区内的延误占总延误的36%,且部分时段中融合区内延误的比重超过了其他延误,由此可知,该模型可以有效地将部分延误及冲突转移至融合区,以促进全局航空器有序进场,提高空域利用率。此外,融合点模型在跑道穿越点处的动态间隔使航空器可以通过调整其在排序边上的飞行时长及进场顺序减小航班在该处的延误,从而降低总延误成本。
表5右侧部分为近似传统运行方式下的延误结果,其进场航班总量低于2种模型,且延误值较大,进场效率较低。结合3.2.2节中的间隔分析可知,传统模式缺乏高效的空中交通管理方法,因此无法有效削减延误,且易造成下游交通流延误积累并传递至上游,从而导致大面积延误产生,影响空域及时隙利用率。
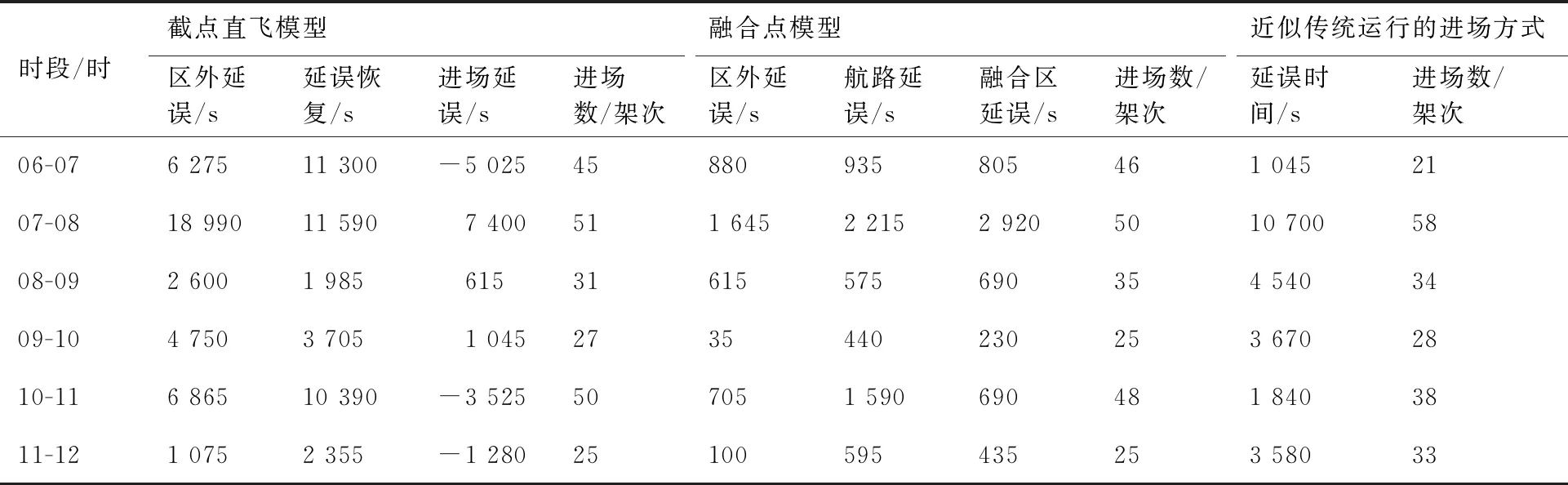
表5 近似传统运行的进场方式及两种模型优化后的延误情况Table 5 Delay outcomes of approximately traditional operation and two optimization models
此外,对比截点直飞模型与融合点模型优化后的结果,截点直飞模型利用选择“捷径”进场的方式可以在化解冲突的同时很大程度上抵消终端区外延误,相比之下,融合点模型没有显著减少延误时长。然而,从空域构型的角度看,截点直飞方式中的直飞航迹在繁忙终端区空域内穿插、汇聚,将在一定程度上影响其他交通流运行,导致交通流复杂度加剧。融合点进场方式虽不能大幅抵消延误,但可以在保持大部分原终端区基本空域构型的基础上,确保航空器无冲突且可换序进场,有利于进场航空器的有序运行,降低管制员工作负荷,并提高交通流运行效率。
3.2.4 流量分析
跑道吞吐量为单位时间内经过跑道入口处的进场航空器架次数,是衡量跑道资源利用率的重要参数。图11展示了原航班计划及2种模型优化后的跑道吞吐量情况,同时加入了戴高乐机场当日实际数据进行对比。跑道最大接收量由单位时间除以航空器着陆时间安全间隔(90 s)求得。
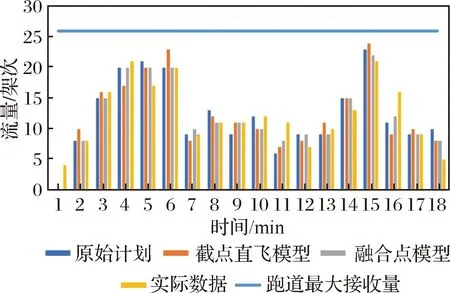
图11 跑道入口处进场交通流流量Fig.11 Number of arrival aircraft at runway entrance
从宏观角度分析,各时间片内4种运行方式下的跑道吞吐量相似,平均流量相近,且都没有出现流量超出容量的情况。从微观角度分析,将2种模型优化后的结果与原始计划及实际运行数据相比较,单位时间内原航班计划、截点直飞方式、融合点方式和实际运行的最大进场数分别为23架次、24架次、23架次和21架次。根据3.1.1节可知,原始航班计划因未考虑管制因素,跑道入口位置上存在大量航空器危险接近或冲突。此外,戴高乐机场实际运行数据中的跑道最大进场数低于2种模型优化后的结果,且存在较多进场航班被取消或延误至实验统计时段外的情况。因此,结合运行安全及效率因素考虑,2种模型的优化结果有利于保障并提高进场跑道吞吐量水平。
4 结 论
本文基于未来TBO空中交通管理概念,结合截点直飞方式与融合点方式进场的运行特征,分别建立了2种对应的混合整数线性规划模型,并对其进行了优化求解与仿真实验,分析了2种运行方式下的进场交通流间隔、延误及流量等情况,进一步揭示了TBO模式下终端区进场交通流的时空特性。
研究结果表明,在冲突解脱方面,2种优化模型可以通过延误、调整进场顺序及选择航迹等方式,有效化解航空器间的冲突;在时隙分配方面,2种 模型可以通过调整部分航班进场顺序、减少航段运行时间及缩小过点间隔等方式,有效提高终端区关键点的运行效率;在延误成本方面,模型可以通过合理安排航空器延误位置等方式,有效降低终端区进离场交通流总运行成本。综上,本文可为实施空中交通科学管控提供重要依据,对未来TBO模式下的终端区空中交通运行管理实践具有一定的理论指导意义。
此外,增加模型中空中控制点的数量无疑可以使模型更为精细化,为优化决策提供更丰富的选择。关于如何设置这些人为增加的控制点,例如点的位置、分布特征、点之间的连通性、传递效应,以及增加控制点是否能够达到最大化提升优化效果的目的等,将是进一步研究的方向。
