基于改进C2算法的弹载雷达抗多径干扰研究
2020-07-16杨寓哲谢光辉刘广君
杨寓哲 谢光辉 刘广君

摘 要:抗多径干扰一直是雷达领域的一大难题。空空导弹在跟踪海面超低空目标时,多径干扰严重影响雷达性能,导致无法发现或辨别目标,跟踪精度差,严重时甚至导致丢失目标。为了有效解决弹载雷达抗多径干扰问题,本文依托某弹载平台,通过对C2算法(多目标角度分辨的最大似然估计算法)优化改进,实现对目标真实位置的有效估计,采用偏差补偿算法对目标估计位置进行修正,减小测角误差,采用动视轴体制,增大目标回波增益。仿真结果表明,动视轴体制下的C2-偏差补偿(C2-BCA)算法能有效减小目标俯仰角估计误差,提高弹载雷达抗多径干扰能力。
关键词: 弹载雷达;多径干扰;镜像;C2算法;偏差补偿算法
中图分类号:TJ760; V37 文献标识码:A文章编号: 1673-5048(2020)03-0073-06
0 引言
现代战争中,飞机和巡航导弹超低空飞行是一种重要的攻击和突防方式,这些低空突防威胁给空空导弹性能提出了更高要求[1-2]。近三十年局部战争经验表明,空空导弹作为海空战场夺取制空权的主要武器,其性能高低已成为决定战争胜负的主要因素[3]。由于海面多径干扰的影响,超低空飞行目标不易被雷达探测与跟踪,雷达对目标截获距离减小、测角误差增大,甚至可能引起脱靶,严重影响了弹载雷达的探测跟踪性能[4]。因此,对弹载雷达的抗多径干扰算法研究具有极其重要的意义。
在空空导弹低仰角测角过程中,常规的测角方法很难有效锁定目标。空空导弹体积小、速度快、位置灵活机动,且空空导弹弹载雷达在跟踪过程中雷达波束相对较窄,这些特点使其测角相对陆基和海基平台变得更加困难。在攻击超低空飞行目标时,需要更加优化的测角算法[5-6]。
一直以来,国内外在多径干扰方面,进行了大量的研究。由于多径干扰的影响,传统的比幅测角算法在测量超低空目标俯仰角时,会产生较大的误差。Bangs将多目标分辨的最大似然估计算法应用在低角跟踪领域,形成C2算法(多目标角度分辨的最大似然估计算法),将目标与其镜像分别当作两个很接近的独立目标,用算法估计出多目标重心位置来近似目标和镜像的几何中心位置,再通过算法估算出来的角度分布范围值推算出目标的俯仰角[7]。Daeipour提出偏差补偿算法可以近似估计出多径干扰对目标真实俯仰角造成的误差,对目标俯仰角进行补偿修正[8]。近些年来,传统C2算法在岸基/海基领域已经得到应用,美国海军海面武器研究中心支持的某实际目标测量试验确认了该算法在低俯仰角测量领域的应用中具有稳定可靠、性能优良等优点,国内的吕韶昱、姜来春等人也证明了C2算法和偏差补偿算法在岸基雷达抗多径干扰领域具有一定应用价值[9-10]。但是,目前尚未有有效手段解决弹载雷达抗多径干扰问题。
为有效解决空空导弹弹载雷达抗多径干扰问题,依托某弹载雷达平台,通过对C2算法优化改进,实现对目标真实位置的有效估计, 采用偏差补偿算法对目标估计位置进行修正,减少误差,采用动视轴体制,增大目标回波增益,形成动视轴C2-BCA算法,最后,进行仿真试验和分析验证。
1 弹载雷达测角状态分析
弹载雷达在海背景下,由于受到海面多径干扰的影响,在海平面下方会产生一个虚假目标,称之为“镜像”。镜像由海面的多径干扰产生,主要发生在目标距离海面较低且平坦条件下,其实质为探测雷达照射目标,经目标、海面两次反射后被雷达接收,等效为在海面下方另外有一个镜像目标存在,形成所谓的“镜像目标”[11]。
多径干扰對导引系统影响主要来自于经直达路径的直达波与经反射路径的反射波在雷达接收机处产生干涉,从而影响弹载雷达对目标的正常探测和跟踪[12]。
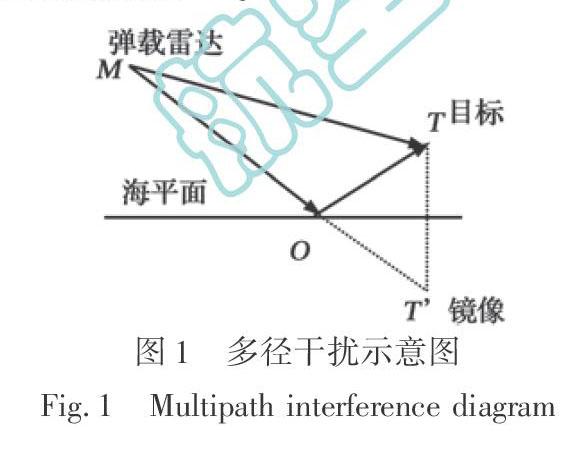
对多径干扰场景的建模是抗多径干扰技术实现的关键一步。本文采用经典的“四路径模型”对多径干扰环境进行建模,四路径模型示意图如图1所示。
其中,M表示弹载雷达位置,O表示雷达波束在海面的反射点的位置,T表示目标的位置,T表示该目标产生的镜像的位置。经典的“四路径模型”包括直达路径MTM,镜像目标传播路径为MTOM,MOTM和MOTOM。路径MOTM在角度上和路径MTM一致,在距离和多普勒频移上和路径MTOM一致,即路径MOTM
不影响雷达测角,但是会影响测距和测速[13-14]。当雷达跟踪地面或海面的超低空目标时,所接收到的信号由两部分组成: 直达信号分量和经海面反射后的多径反射分量。多径反射分量又分两部分: 一部分是镜面反射分量,指反射信号的相干部分,其相位是随目标或雷达的位置变化而有规律的变化;另一部分是散射部分,
指反射信号的非相干部分,当目标运动时其相位变化是随机的[15]。
C2算法将目标与其镜像分别当作两个很接近的独立目标,用算法估计出多目标重心位置来近似目标和镜像的几何中心位置,再通过该算法估算出来的角度分布范围推算出目标的俯仰角。相比传统方法,该算法能直接估计出目标和镜像的位置,提高了分离目标和镜像的成功率。根据相关文献的描述,传统C2算法在岸基/海基领域已经得到应用,用于事后处理的估计误差大约在雷达波束宽度的1/20左右[16]。所以,该算法在工程上具有较好的应用前景, 其示意图如图2所示。其中,θt为目标位置到雷达视轴的角度;θm为镜像位置到雷达视轴的角度;B为视轴到目标与镜像几何中心的角度;C为目标与镜像的角度分布范围。
在弹载雷达低仰角测角过程中,C2算法通过雷达和差通道信号,估计目标与镜像的几何中心位置B以及角度范围C。在实际过程中,通常会观测N个点,进行一次计算。其中,B和C分别为
目标与镜像相对视轴的俯仰角可计算得到:
采用C2算法的空空导弹在多径干扰下的低仰角跟踪中,即使目标和镜像同时在雷达波束中,也可估计出目标和镜像的真实位置,从而有效区分目标和镜像。
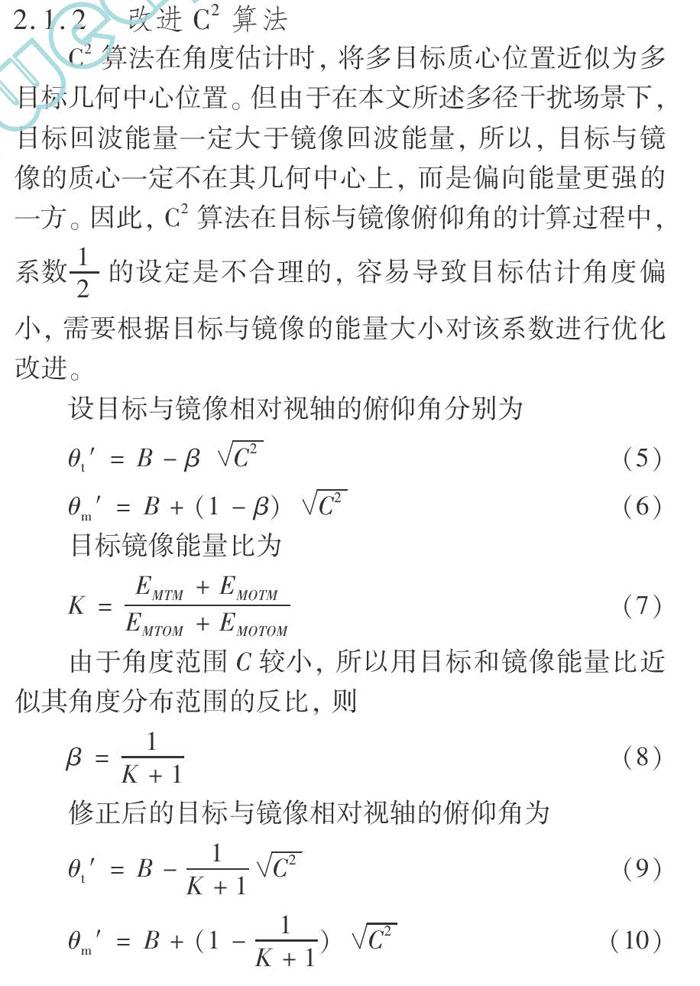
2.1.2 改进C2算法
C2算法在角度估计时,将多目标质心位置近似为多目标几何中心位置。但由于在本文所述多径干扰场景下,目标回波能量一定大于镜像回波能量,所以,目标与镜像的质心一定不在其几何中心上,而是偏向能量更强的一方。因此,C2算法在目标与镜像俯仰角的计算过程中,系数12的设定是不合理的,容易导致目标估计角度偏小,需要根据目标与镜像的能量大小对该系数进行优化改进。
设目标与镜像相对视轴的俯仰角分别为
但是,由于在实际测角过程中,无法直接得到目标和镜像的能量,需要进行参数估计。通过C2算法可以得到目标与镜像俯仰角,且雷达高度、弹目距离和雷达方向图已知,所以可以通过估计四路径的能量,得到目标镜像能量比。在参数估计过程中,所有涉及到的量都可以计算出来:
其中: Gt, Gr, Gt′等分别为对应路径的发射和接收增益;ρs, ρd分别为镜面反射系数和漫反射系数;R1, R2分别为雷达和目标至反射点距离。
改进后的系数β根据目标与镜像能量关系的变化自适应地改变,能够更真实地反映两者的角度关系,从而使改进C2算法获得更加精确的目标俯仰角。
2.2 C2-BCA算法
对C2算法进行了分析和改进,但是改进C2算法在低仰角测角中,仍然存在一定误差。用改进C2算法替代偏差补偿算法中的航迹滤波,将其计算出的角度信息用偏差补偿算法处理,可以补偿多径干扰带来的影响,提高测角精度[17]。
偏差补偿算法的主要思想是: 当雷达对超低空远距离平稳飞行的目标进行测角时,根据雷达接收机收到的差路信号与和路信号之比所求得的俯仰角与目标真实俯仰角在大部分时间里相差一个近似确定的值,这个误差主要由目标与镜像回波的干涉产生,且涉及该误差的所有参量都能被估计出来[18]。
在经典四路径模型下,考虑通道热噪声(接收通道噪声方差为σ2w),单脉冲雷达的差路信号与和路信号之比为
式中: D表示差路信号;S表示和路信号;v是总的反射系数;rt=gd(θ)/gs(θ),是只考虑直射路径时的单脉冲比;rr=gd(ψ)/gs(ψ),是只考虑反射路径时的单脉冲比;g=gs(ψ)/gs(θ); φl是由反射路径和直射路径的距离差造成的接收相位差。
在式(12)中,差、和信号之比与海面反射系数是非线性关系,不能用镜面反射和漫反射的简单叠加来计算总的偏差,必须考虑镜面反射和漫反射同时存在的情况。漫反射系数是一个复随机变量,满足瑞利分布,可以写成
式中: x和y是相互独立的高斯分布随机变量, 方差为σ2d。此时,总的反射系数为
v=ρs+ρd=|ρs|cosφs+x+j(|ρs|sinφs+y)=|v|ejφr(14)
式中: φs是镜面反射系数的相角;φr是总的反射对镜像目标产生的附加相位;w1,w2是和差通道中独立的高斯分布噪声,其功率为σ2w,可得
式中: sm是和通道信号;ni是两个独立高斯复变量的乘积,采用矩匹配高斯近似法求其均值和方差:
由于无法估计相对相位,这里采用方差的相位平均值,即
σ-2n=2g2σ2wσ2d|sm|2+σ2w|sm|2(1+g2|ρs|2)(18)
這时,多径干扰引起的偏差为
式中:Δr=rr-rt。公式的第一项只是在反射系数v上加了一个不相关的噪声分量n2/gejφ,因此偏差只需将不加噪声的v的均值η和方差γ2替换为|v+n2/gejφ|的均值ηm和方差γ2m。如下:
由于n1和n2与v均无关,因此ε2对偏差均值的贡献为0。ε3对偏差均值的贡献可以用条件均值求出:
最后,多径干扰引起的总偏差为
式中:rr和g利用改进C2算法计算和天线方向图得到;ηm和γm由式(20)得到;相位φ=φr+φl;|sm|为和通道信号幅度;σ2w为和、差通道接收机噪声功率,可以通过直接测量和估计得到。 目标俯仰角可由下式求得:
r^t=Re(r)-Bbias=Re(DS)-Bbias(23)
E=r^t/k+E0(24)
式中: k为弹载雷达测角斜率;E0为雷达视轴相对水平线的偏轴角,文中规定水平线以上为负,水平线以下为正。
3 仿真试验
仿真条件如表1所示。
同样试验条件下,在1~20 km的弹目距离进行仿真,分别采用传统算法、改进C2算法和C2-BCA算法, 结果如图3~4所示。
同样试验环境下,在3 km的弹目距离对本文所述算法进行500次仿真,仿真结果如图5所示。
从以上仿真结果看出,改进C2算法相对传统测角算法,在测角精度和稳定性上,有了较大的提升。C2-BCA算法在改进C2算法的基础上,其测角结果有了进一步改善。
采集仿真中18 km、14 km、8 km、4 km弹目距离处的仿真数据,如表2所示。
试验表明,远距离测角时,由于目标和镜像能量比变化小,目标俯仰角变化率小,使得测角精度相对较好。当弹目距离越来越小时,目标角度变化率增大,目标和镜像能量比变化大,测角精度相对下降。综合以上试验,在该试验环境下,传统测角算法的测角精度约为0.2°,C2-BCA算法测角精度约为0.02°。
將雷达视轴与水平线夹角E0依次调整至0°,0.15°,0.3°,0.5°进行试验,分析E0对雷达测角精度的影响。在同样试验条件下,采用C2-BCA算法,采集仿真中18 km, 14 km, 8 km, 4 km弹目距离处的仿真数据,如表3所示。
从表3中可以看出,当采用固定视轴时,E0取0.15°能够一直保持相对较高的测角精度。
但是,在弹载雷达跟踪目标时,雷达视轴通常指向目标和镜像的质心。在本文中,由于C2-BCA算法能在目标和镜像同时存在波束内时估计目标俯仰角,在同样的条件下,让雷达视轴直接指向目标的估计位置,在理论上可以提高目标回波增益,提高测角精度。
同样试验条件下,分别采用固定视轴C2-BCA算法(E0=0.15°)和动视轴C2-BCA算法(视轴指向目标估计位置),在1~20 km弹目距离进行仿真, 仿真结果如图6所示。
试验结果显示,动视轴下全弹道测角精度提升了约30%,且在10 km弹目距离内优化效果明显。这是因为动视轴体制保持了较高的目标增益,削弱了多径干扰带来的影响。
4 结论
本文对多径干扰下弹载雷达跟踪超低空目标的测角场景进行了分析,结合弹载平台特点,对C2算法和偏差补偿算法进行了研究和改进,形成C2-BCA算法。仿真结果显示,在本文限定条件下,弹载雷达测角精度从0.2°提升至0.02°。证明了C2-BCA算法相比传统的测角算法,能够大幅提高弹载雷达测角精度,具有一定的抗多径干扰能力。根据弹载平台特点,本文在动视轴体制下进行试验,仿真结果显示,动视轴体制下的C2-BCA算法能进一步降低弹载雷达测角误差。
但是,动视轴C2-BCA算法离工程应用还有一定差距。可以发现,较近弹目距离(1~5 km)的测角结果仍略往镜像方向偏移,多径干扰影响有待进一步削弱。偏轴跟踪技术可以减小镜像分量的能量,是一种简单、有效的抗多径干扰手段[19-20]。下一步的研究重点是引入偏轴跟踪,改善目标镜像能量比,研究自适应最优偏轴角下C2-BCA算法的抗多径干扰能力。
参考文献:
[1] 杨选春,孟立勋,郝鹏飞. 一种抑制镜像干扰的新方法[J].战术导弹技术, 2005(1): 59-62.
Yang Xuanchun,Meng Lixun, Hao Pengfei.A New Method of Restraining Mirror-Image Jam[J]. Tactical Missile Technology,2005(1): 59-62.(in Chinese)
[2] 祝明波, 车驰峰, 邹建武, 等. 超低空反导中的多径效应及其抑制研究综述[J]. 飞航导弹, 2015(11): 64-67.
Zhu Mingbo,Che Chifeng,Zou Jianwu,et al.A Review of Multipath Effects and Suppression in Over-Low Altitude[J].Aerodynamic Missile Journal,2015(11): 64-67. (in Chinese)
[3] 樊会涛,张蓬蓬.空空导弹面临的挑战[J]. 航空兵器, 2017(2): 3-7.
Fan Huitao,Zhang Pengpeng.The Challenges for Air-to-Air Missile[J].Aero Weaponry,2017(2): 3-7. (in Chinese)
[4] 肖宇,郑桂妹, 宫健, 等. 镜像多径引起的超低空目标跟踪指示角误差分析[J].弹箭与制导学报, 2016,36(4): 9-12.
Xiao Yu,Zheng Guimei,Gong Jian,et al.Analysis of Low-Altitude Target Tracking Indication Angel Error Caused by Specular Multipath[J]. Journal of Projectiles,Rockets,Missiles and Gui-dance, 2016, 36(4): 9-12. (in Chinese)
[5] 鹿玉泽,郑家毅,李伟,等. 干扰条件下弹载认知雷达波形优化研究[J].航空兵器,2017(5):37-44.
Lu Yuze,Zheng Jiayi,Li Wei,et al.Cognitive Waveform Optimization for the Missile-Borne Radar under Jamming Condition[J].Aero Weaponry,2017(5): 37-44. (in Chinese)
[6] 任淼,文琳,王秀萍.2016年国外空空导弹发展动态研究[J].航空兵器,2017(1):10-17.
Ren Miao,Wen Lin,Wang Xiuping.Research on Foreign Air-to-Air Missiles Development in 2016[J]. Aero Weaponry, 2017(1):10-17. (in Chinese)
[7] Bangs W J.Robust Mitigation of Unresolved Multipath SBIR Topic N94-216 Final Report[R].Submitted to Naval Surface Warfare Center,Dahlgren Division,1996.
[8] Daeipour E,Blair WD, Bar-Shalom Y.Bias Compensation and Tracking with Monopulse Radars in the Presence of Multi Path[J].IEEE Transactionson Aerospace and Electronic Systems,1997, 33(3): 863-882.
[9] 呂韶昱,万建伟, 辛勤.海面多径环境下雷达目标俯仰角测量提取的研究与应用[J].国防科技大学学报,2007, 29(5): 48-53.
Lü Shaoyu,Wan Jianwei,Xin Qin.Research and Application of Radar Target Elevation Measurement Extraction in the Presence of Sea-Surface Multi-Path[J].Journal of National University of Defense Technology, 2007, 29(5): 48-53. (in Chinese)
[10] 姜来春. 基于C2算法海杂波抑制在低仰角跟踪时的应用[J]. 现代电子技术, 2013, 36(13): 25-27.
Jiang Laichun.Application of Sea Clutter Suppression Based on C2 Algorithm in Low-Elevation Angle Radar Tracking [J].Modern Electronics Technique,2013, 36(13): 25-27. (in Chinese)
[11] Skolnik M I. 雷达手册[M]. 3版. 北京: 电子工业出版社,2010: 378-379.
Skolnik M I.Radar Handbook[M].3rd ed. Beijing: Electronic Industry Press, 2010: 378-379.(in Chinese)
[12] 肖宇, 郑桂妹, 宫健. 单脉冲角跟踪误差影响因素分析[J]. 弹箭与制导学报, 2017, 37(2): 15-18.
Xiao Yu,Zheng Guimei,Gong Jian.Influence Factors Analysis of Mono-Pulse Angle Tracking Error[J].Journal of Projectiles,Rockets,Missiles and Guidance,2017, 37(2): 15-18. (in Chinese)
[13] 王英, 顾健. 海面电波反射特性研究与仿真分析[J]. 电子设计工程, 2016, 24(5): 113-115.
Wang Ying,Gu Jian.Research and Simulation Analysis of Radio Reflection Characteristic Over the Ocean[J].Electronic Design Engineering,2016,24(5): 113-115. (in Chinese)
[14] 陈珲, 徐亮, 张言明, 等. 超电大复杂目标太赫兹散射特性建模微波方法延拓研究[J]. 雷达学报, 2018, 7(1): 108-118.
Chen Hui,Xu Liang,Zhang Yanming,et al.Theoretical Extension of a Microwave EM Method for Predicting the Terahertz Scattering of Electrically Large Complex Target[J].Journal of Radars,2018, 7(1): 108-118.(in Chinese)
[15] 刘继东, 吴金亮, 孙书恩.某单脉冲雷达多路径仰角跟踪误差建模与计算[J].装备指挥技术学院学报,2007,18(1): 83-86.
Liu Jidong,Wu Jinliang,Sun Shuen.Modeling and Calculating of Multipath Effect of Low Angle Tracking for a Monopulse Radar[J].Journal of the Academy of Equipment Command & Technology,2007,18(1): 83-86.(in Chinese)
[16] BangsW J,II, Bock J ,Wagner T M.Monopulse Elevation Discrimination Experiments in Low-Angle Multipath[C]∥SPIE Conference on Radar Processing, Technology, and Application Ⅲ, San Diego, United States, 1998: 136-146.
[17] 齐宏峰, 康健. 雷达低仰角目标跟踪的测角误差实时补偿算法[J]. 吉林大学学报: 信息科学版, 2016, 34(6): 724-731.
Qi Hongfeng,Kang Jian.Real-Time Angle Measurement Bias Compensation Algorithm for Low-Elevation Target Tracking[J].Journal of Jilin University: Information Science Edition,2016, 34(6): 724-731. (in Chinese)
[18] 杨世海.相控阵雷达低空目标探测与跟踪技术研究[D]. 长沙: 国防科技大学,2002: 3-8.
Yang Shihai.Low-Altitude Target Detection and Tracking Technology for Phase Array Radar[D].Changsha: National University of Defense Technology,2002: 3-8. (in Chinese)
[19] Kirkpatrick G M. Final Engineering Report on Angular Accuracy Improvement[M]. Dedham: Artech House, 1974.
[20] 屈晓光, 韩林频, 朱可炎. 雷达偏轴跟踪低空目标检测性能估计[J]. 现代防御技术, 2000, 28(6): 36-40.
Qu Xiaoguang,Han Linpin,Zhu Keyan.A Detection Performance Analysis of Bias Axis Tracking of Low Altitude Target[J].Modern Defence Technology,2000, 28(6): 36-40.(in Chinese)
Research on Anti-Multipath Interference of Missile-Borne Radar
Based on Improved C2Algorithm
Yang Yuzhe*, Xie Guanghui, Liu Guangjun
(China Airborne Missile Academy,Luoyang 471009,China)
Abstract: Anti-multipath interference has been a big problem in the radar field. When air-to-air missiles track low altitude targets under sea background,the multipath interference can seriously affect the radar performance, and this will cause failure of targets discovery or targets recognition, poor tracking accuracy and even cause target loss. In order to solve the multipath interference problem of missile-borne radar,the improved C2 algorithm(multi-objective angle-resolved maximum likelihood estimation algorithm)is used to realize the effective estimation of the target real positionbased on missile-borne platform. The bias compensation algorithm is used to correct the target estimation position, reduce the error amount, and the moving visual axis system is adopted to increase the echo gain of the target. The simulation results show that the C2-BCA algorithm can effectively reduce the estimation error of target pitch angle and improve the anti multipath interfernce ability of missile-borne radar.
Key words: missile-borne radar; multipath interference; mirror; C2 algorithm; bias compensation algorithm
收稿日期: 2018-11-30
作者簡介: 杨寓哲(1993-), 男, 河南洛阳人, 硕士研究生, 研究方向是雷达抗干扰算法。
E-mail: 532960974@qq.com
引用格式: 杨寓哲,谢光辉,刘广君. 基于改进C2算法的弹载雷达抗多径干扰研究
[ J].
航空兵器, 2020, 27( 3): 73-78.
Yang Yuzhe, Xie Guanghui, Liu Guangjun. Research on Anti-Multipath Interference of Missile-Borne Radar Based on Improved C2 Algorithm[ J]. Aero Weaponry, 2020, 27( 3): 73-78.( in Chinese)
