利用激光跟踪仪测量大口径非球面几何参数
2020-07-09庞哲宗肖颖杜建祥
庞哲 宗肖颖 杜建祥
(北京空间机电研究所,北京 100094)
0 引言
随着航天光学遥感对分辨率需求的不断提高,空间遥感器光学系统的口径也越来越大、焦距越来越长,大口径、长曲率半径的非球面反射镜的使用需求越来越多。光学系统主镜的口径已从原来的几百毫米增大到1m 以上甚至几米。为了保证空间光学系统的成像品质,光学设计对大口径非球面反射镜的几何参数如顶点曲率半径和非球面系数的公差提出了严格的要求,如直径1.5m 的非球面主镜要求4m 长的顶点曲率半径R0公差控制在±1mm,测试精度要求0.2mm,二次非球面系数K公差控制在±0.0002。利用offner 补偿器检测方法测试上述非球面的顶点曲率半径和二次非球面系数时,需要4m 长的距离测试精度达到几十微米,才能保证R0和K的测试精度满足要求[1-6]。
传统的利用补偿器法测量非球面反射镜几何参数的方法,是在干涉仪会聚点处架设刀口,通过观察会聚点处的刀口阴影来调整刀口位置,然后用一根短的测量杆来测量刀口与补偿器之间的距离,再用另一根长的测量杆测量非球面顶点(中心有孔时测孔边缘换算)到补偿器的距离,短杆的测量精度可以控制到0.01~0.02mm,长杆的测量精度依赖于测量杆的长度及实现方式。测量过程中会聚点刀口阴影判定的准确性和测杆上测尖与被测表面接触力的大小依赖于测试人员的经验。
对于大口径长曲率半径的非球面反射镜,当曲率半径达到几米时,对应的干涉仪会聚点到非球面顶点的距离也达到几米的量级,当该距离的测试精度需要几十微米时,用卷尺测量远远达不到要求,而制作几米长的测量杆、且长度尺寸的变化要控制在几十微米范围内时,对测量杆的材料、制作工艺、支撑方式的选择和环境温度的控制都提出了苛刻的要求,工程上实现难度大。激光跟踪仪在测量米级距离上具有十微米到几十微米的精度,具有工程上容易实现的优势。
美国的詹姆斯韦伯空间望远镜主反射镜的顶点曲率半径测试,在计算全息图(CGH)补偿法检测面形光路中,使用了绝对距离测量装置测量CGH 到非球面反射镜距离,最终把15.9m 的顶点曲率半径的绝对精度控制在了±0.25mm,重复性精度控制在了±0.1mm[7-11]。国内方面,文献[12-13]针对非球面零补偿透镜补偿检测中采用激光跟踪仪测量几何参数的方法进行了研究,给出了离轴非球面几何参数测试的重复误差。本文在offner 补偿器检测非球面面形的光路中,利用激光跟踪仪测量干涉仪会聚点到补偿器的距离和补偿器到非球面反射镜顶点的距离;建立了测量模型、研究了轴对称非球面反射镜顶点坐标的拟合算法,给出了数据处理方法;对顶点曲率半径4m 量级、直径1.5m 的轴对称非球面反射镜进行了测试实验,给出了非球面几何参数测试结果和测试误差分析。
1 测量原理
本文所测的非球面几何参数包括顶点曲率半径和二次非球面系数。利用offner 补偿器测试非球面面形[14-18]的光路如图1 所示,图1 中L1为干涉仪会聚点到补偿器补偿镜前表面的距离(以下简称短焦距离),L2为补偿器的厚度(已知量),L3为补偿器场镜后表面中心到非球面反射镜顶点的距离(以下简称长焦距离),L为干涉仪会聚点到非球面反射镜顶点的距离。
对于图1 所示的面形测试光路,在测量L1和L3之前,首先要将干涉仪会聚点、待测非球面顶点与补偿器调至同轴,一般将待测非球面面形的初级彗差项调至不大于0.02λ(λ为激光干涉仪的工作波长),并将L1调至offner 补偿器的设计理论值,然后固定L1,调整L3的大小直至由待测非球面镜反射的光束通过补偿器后的会聚点与干涉仪出射球面波的会聚点重合,测量此时的L3,并记录面形结果中的离焦量和初级球差值。然后将测试得到的L1和L3带到光学设计软件建立的仿真模型中,在系统波像差中以实测的离焦量和初级球差值为优化目标,以顶点曲率半径与二次非球面系数为优化参数进行优化,就可以得到优化后的顶点曲率半径与二次非球面系数的值,以此作为几何参数的实测值。

图1 offner 补偿器检测非球面原理Fig.1 The offner compensator schematic detecting aspherical surfaces
用激光跟踪仪测量L1和L3时,干涉仪会聚点可以通过靶球球心对干涉仪球面波的自准直进行测量,通过观察干涉条纹来判断靶球中心是否与干涉仪会聚点重合,并测量靶球表面的面形,根据面形中离焦量的大小,靶球中心与干涉仪会聚点重合程度,二者重合时,用激光跟踪仪测量靶球球心的坐标;再用靶球分别测量补偿器补偿镜的前表面和非球面镜面,通过算法拟合得到补偿器补偿镜前表面的方程和待测非球面的顶点位置坐标;然后计算干涉仪会聚点分别到补偿镜前表面和非球面反射镜顶点的距离L1和L,由L3=L-L1-L2得到L3的实测值。
2 测试实验的模型建立与数据处理
2.1 模型建立
在offner 补偿器测试光路中,想要得到非球面反射镜的顶点曲率半径和二次非球面系数值,需要用到两个数值:一是干涉仪会聚点到补偿器前镜的短焦距离L1,二是干涉仪会聚点到非球面反射镜顶点的距离L。为此要先确定非球面反射镜的顶点位置,并根据L3=L–L1–L2计算出L3的具体数值,然后才能带入光学仿真软件中进行检测。因此,需要找出能确定这些关键点的基准面来测量出这些点的数据以便完成下一步的工作。
图2 的测试模型图中给出了激光跟踪仪需要测量的相关数据点,图中待测非球面镜端面(平面)和侧面圆柱面是轴对称非球面镜的结构基准,光学加工时会以这两个面为基准,控制非球面镜的回转对称性。图3 给出了建模与数据处理的流程。
2.2 数据测量
在架设好激光跟踪仪后,将坐标系建在激光跟踪仪的基座上。对图2中各点数据进行采集。整个采集过程应当在稳定的环境下进行,避免造成过多的粗大误差出现。
(1)测量干涉仪会聚点数据
调整好测试面形光路后,将激光跟踪仪靶球放置于干涉仪出射的球面波会聚点处,调整靶球位置,使得靶球中心与干涉仪会聚点重合,调整干涉条纹疏且直,并调整靶球的轴向距离使靶球面形的离焦量值小于0.005λ,用激光跟踪仪测量此时的靶球球心坐标,即可得到干涉仪会聚点的坐标值。
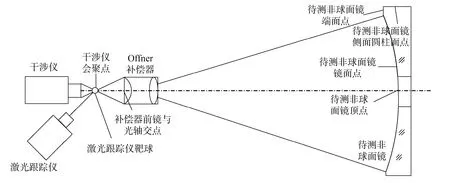
图2 测试实验模型Fig.2 The test experiment model diagram

图3 建模与数据处理流程Fig.3 The modeling and data processing flow chart
(2)测量补偿器补偿镜前表面数据
为了得到干涉仪会聚点到补偿镜前表面的距离,第二步需要测量补偿器前镜面的位置信息。将激光跟踪仪靶球与补偿镜前表面接触,进行多点测量,记录数据。
(3)测量待测非球面镜数据
为了得到干涉仪会聚点到待测非球面镜顶点的距离,关键是要找到待测非球面镜的顶点位置。先利用激光跟踪仪靶球在待测非球面镜前端面上进行多点测量及平面拟合,并将端面设为基准面;然后用靶球在待测非球面镜的侧面圆柱面上进行多点测量,再把测量出的侧面圆柱面上的点投影至前端面上,形成一个离散的圆环,拟合出该圆环的中心点,这个中心点就是光轴过端面的点;最后用靶球测量待测非球面镜面上多点的坐标,拟合出非球面,通过数据拟合得到待测非球面镜的顶点位置。
2.3 数据处理
数据处理的关键是拟合算法,在得到激光跟踪仪测量的各点数据后,进行数据的拟合处理。
(1)拟合补偿器补偿镜前表面
本文所用的offner 补偿器的补偿镜前表面为平面,空间中的数据点拟合得到平面,其实就是一个最优化的过程,即求这些点分别到某个平面的距离之和最小的问题[19]。
已知平面方程为

式中A、B、C、D为常数;x、y、z为点的坐标。
设该拟合平面各数据点坐标为H1,H2,...,Hα;α为数据点H的数量;坐标原点O0在激光跟踪仪基座上,各数据点的平均值为H0=(H1+H2+...+Hα)/α。新的矩阵Q通过式(2)所得,再对矩阵Q进行奇异值分解(SVD)就可得到平面方程中的A、B、C。

奇异值分解法基于以下线性代数定理

式中Q为行数α大于或等于列数β的矩阵,U为α行α列的正交矩阵;W为α行β列对角线矩阵;β为矩阵V的列数;w1、w2,...,wβ为矩阵元素;VT为一个β乘β的正交距阵的转置矩阵。矩阵Q可以写成矩阵U、矩阵W、转置矩阵VT的乘积形式。然后根据式(4)有

式中U和V为标准正交矩阵;I为单位矩阵。对于超定方程组,Q为α行β列(α≥β)的矩阵,对矩阵Q进行奇异值分解,由式(4)可得

式中wi为w1、w2,...,wβ中的某一矩阵元素,diag 表示对角矩阵,于是得到超定方程组Qa=b的极小最小二乘解,可以表示为

式中a为超定方程组的极小最小二乘解;b为列矩阵。根据协方差矩阵的SVD 变换,最小奇异值对应的奇异向量就是平面方程中的A、B、C,通过坐标原点和各数据点平均值点的矢量与平面法向量的点积运算,就能得到拟合平面在坐标轴上的截距系数,即式(7)所示

最终得到拟合平面的平面方程Ax+By+Cz+D=0。
(2)拟合待测非球面镜前端面外圆圆心
待测非球面镜端面拟合的问题也是平面拟合的问题,由第一步方法可以解决。之后要解决的是将侧面圆柱面上的测量点投影至端面上并拟合成圆、再寻找圆心的问题。
已知一个平面以及平面外任一点Pj,Pj的坐标为(xj,yj,zj),j为任一P点的下标;计算点Pj到平面的投影P0,如图4 所示。
给定的平面的方程如式(1)所示,过点Pj到平面的垂足记作P0(x0,y0,z0),则直线PjP0与平面的法向量平行,直线PjP0的参数方程为

式中xj,yj,zj为Pj点的坐标。将点Pj(xj,yj,zj)带入平面方程式(1),求出参数t

式中t为未知参数。再将式(9)中的参数t带入直线的参数方程式(8)就求出了投影点P0(x0,y0,z0)。

图4 平面外一点投影至平面示意Fig.4 Projection from outside into the plane
之后要将投影到平面上的点拟合成一个圆,并求出该圆的圆心坐标。
设数据集为X,每个点是Xγ,那么圆心、圆的半径可以通过拟合圆来求得。

式中Xγ为数据点,γ为数据点个数,O为圆心,R为圆的半径。圆的法向量就是拟合平面的法向量。最后(O–X)·(O–X)T的最小特征值所对应的特征向量就是圆心坐标。
(3)拟合待测非球面镜顶点
在offner 补偿器检测系统完成共轴调整后,检测系统的光轴是干涉仪会聚点与非球面顶点的连线。实际计算中,非球面顶点坐标是未知待求的。对于轴对称非球面镜,考虑到在非球面的光学加工中会将非球面光轴相对于前端面的倾斜及相对于侧面圆柱面回转轴的偏心,控制在设计要求范围内,可以将干涉仪会聚点与上述(2)中所求出的非球面镜前端面外圆圆心的连线视作光轴,将连线与非球面的交点作为非球面的顶点。
通过用激光跟踪仪靶球与镜面接触测量,可以得到非球面镜在激光跟踪仪坐标系中的非球面方程。但在靶球测量镜面点时,测出的是靶球中心点坐标,与靶球实际接触镜面点的坐标之间存在偏差,如图5 所示。

图5 测量点偏差示意Fig.5 Measuring point deviation
图5 中Z与Y分别为两个方向的坐标轴,P点为靶球中心点,P'点为镜面实际接触点。将靶球及其与待测非球面镜面的接触点投影至与前端面垂直的平面,如图6 所示。

图6 镜面点靶球半径补偿示意Fig.6 The diagram of mirror point ball radius compensation
图6 中O1点为非球面顶点,Z轴为光轴方向的坐标轴,Y轴为过非球面顶点垂直于光轴方向的坐标轴,P点为靶球中心,P'点为镜面实际接触点,P"点为P点沿光轴方向投影至镜面的点,P1、P1'分别为P点、P'点在Z轴的投影点,P2、P2'分别为P点、P'点在待测非球面镜端面的投影点,PP1为靶球中心与光轴的距离,r为镜面实际接触点P'与光轴的距离,PP2为靶球中心与待测非球面镜前端面的距离,P'P2'为镜面实际接触点与前端面的距离,ι为镜面实际接触点P'与Y轴的距离,S点为P'点在PP"上的投影点。
根据待测非球面镜理论值参数,借由高次曲线方程[20-21]

式中c为顶点曲率;K为二次非球面系数;r为曲线上一点到顶点的横向距离;ι为同一点到顶点的纵向距离;a4、a6为高次项系数。
对式(11)进行求导,得

式中ι'为P'点的斜率。

式中k为P'点在镜面的法线方向值,选用的靶球半径为6.35mm,为了求出P'点的坐标,需要计算PS与SP的值,已知△PSP'为直角三角形,且斜边PP'的斜率已知,长度为6.35mm,因此可直接求得PS与SP'的值,如式(14)所示

将PS的值与PP2相加,就得到了镜面实际接触点P'与端面的距离P'P2';将SP'的值与PP1相加,就得到了镜面实际接触点P'与光轴距离r。此时,再将r代入到式(11)中,就可得到此时P'点到顶点的纵向距离ι。P'P2'与ι的和,就是待测镜顶点与端面外圆圆心点的纵向距离结合端面外圆圆心点坐标,就可求得待测镜顶点的位置坐标。
在测试实验中,每个靶球与待测非球面镜面的接触点均可求得一个待测镜顶点的位置坐标,一般接触点选取不同环带进行测量,每个环带至少六个接触点,测量接触点的不同对顶点拟合的影响在下文4.3 节中分析。
最后,测量出的图1 中干涉仪会聚点到补偿器补偿镜前表面的距离L1(短焦距离)、干涉仪会聚点到非球面反射镜顶点的距离L,根据已知的补偿器厚度,由L3=L–L1–L2得出补偿器场镜后表面到非球面反射镜顶点的距离L3(长焦距离)。将L1和L3以及非球面面形测试数据中的离焦量和初级球差代入到光学设计软件中进行优化,便能得到实测的顶点曲率半径和二次非球面系数。
3 测试实验
测试实验选用口径1.5m 带有中心孔的轴对称非球面反射镜,非球面顶点曲率半径R0设计值为4250.733mm,二次非球面系数K设计值为–0.5198。测试实验现场如图7 所示,由激光干涉仪,补偿器,待测非球面镜,激光跟踪仪以及激光跟踪仪靶球五部分组成。激光跟踪仪的基础测试精度为15μm,并在仪器测量距离每增加1m 的情况下测试精度增加6μm。待测非球面镜面形采用offner 球面波补偿器测试,图8 为检测系统在光学设计软件Zemax 中的光路图。

图7 测试实验现场Fig.7 The experiment site map

图8 1.5m 待测非球面镜检测光路Fig.8 A 1.5m aspherical mirror detection light path diagram

图9 激光跟踪仪靶球中心与干涉仪会聚点重合时靶球的面形图Fig.9 The target ball surface figure when the center of the target ball and the convergence point of the interferometer coincide
将干涉仪会聚点、待测非球面顶点与补偿器调至同轴,保证待测非球面面形的初级彗差项不大于0.02λ;按图2 在干涉仪会聚点处放置激光跟踪仪靶球,按2.2(1)调整靶球中心与干涉仪会聚点重合,激光跟踪仪靶球中心与干涉仪会聚点重合时靶球的面形见图9,图9中离焦量为–0.0007λ;然后用激光跟踪仪测量短焦距离L1,并调整L1至补偿器的设计值;固定L1,调整L3的大小直至测试的待测非球面面形中的离焦量值小于0.01λ,测试待测非球面面形,图10 给出了实测的面形图,其中离焦量为0.0126λ、初级球差为–0.0199λ;测量此时的L,计算出长焦距离L3。最后将测试得到的L1和L3带到光学设计软件建立的offner 补偿器检测系统中,在系统波像差中以实测的离焦量和初级球差值为优化目标,以顶点曲率半径与二次非球面系数为优化参数进行优化,就可以得到优化后的顶点曲率半径与二次非球面系数的值,以此作为几何参数的实测值。表1 给出上述实验的测试结果。

图10 待测非球面镜面形检测图Fig.10 The aspheric mirror surface figure

表1 实验测试结果Tab.1 Experimental test results
4 误差分析
对上述测试实验中待测非球面镜几何参数的测试误差进行分析。顶点曲率半径与二次非球面系数的测量误差源主要包括补偿器参数误差ε1、干涉仪出射球面波会聚点到补偿器距离(短焦距离)测量误差ε2、补偿器到待测非球面顶点距离(长焦距离)测量误差ε3[22-23]。考虑到ε1、ε2、ε3非相关,几何参数的综合测试误差ε按式(15)计算

4.1 补偿器参数误差引起的几何参数测量误差ε1
实验所用的补偿器由两片透镜组成,透镜各面面形均达到补偿器设计要求。影响非球面几何参数测量误差的补偿器参数误差主要包括透镜的曲率半径、厚度、材料折射率和补偿器的装调误差,补偿器的装调误差包括两片透镜的镜间距、偏心和倾斜误差。由补偿器参数误差引起的几何参数的测量误差见表2。
4.2 短焦距离误差引起的几何参数测量误差ε2
利用激光跟踪仪对干涉仪出射球面波的会聚点到补偿器补偿镜前表面(平面)的距离L1(短焦距离)进行了12 次重复测量,单次测量数据与测量平均值的偏差见图11。按式(16)计算短焦距离12 次测量的标准偏差σ1

式中σ1为短焦距离的标准偏差;s为测量次数;此处s=12;Eκ为第κ次的测量值;为s次测量的平均值。

表2 补偿器参数误差对几何参数的影响Tab.2 Influence of compensator measurement tolerances on geometric parameters
将短焦距离12 次测量的平均值143.285mm 及图11中每次测量值与平均值的偏差带入式(16),得到σ1=0.0032mm。
取扩展因子为3,此时置信概率为99.73%,短焦距离测量误差ΔL1=3σ1=0.01mm。
短焦距离测量误差对待测非球面几何参数的影响见表3。

图11 短焦距离重复性实验结果Fig.11 Short-focus distance repeatability test results

表3 短焦距离测量误差的对几何参数的影响Tab.3 Influence of short focus distance measurement errors on geometric parameters
4.3 长焦距离误差引起的几何参数测量误差ε3
由图1 可知,长焦距离L3=L–L1–L2。
长焦距离L3的测量误差源有两个,一个是待测非球面顶点坐标的拟合误差u1;另一个是激光跟踪仪测量的拟合非球面顶点到干涉仪会聚点的距离L的误差u2。
将本文算法拟合的待测镜顶点至待测镜前端面矢高与三坐标测试的非球面顶点至相同端面矢高进行比对(见表4),以比对差值作为u1。

表4 待测非球面镜顶点位置拟合误差对比分析结果Tab.4 Comparison analysis results of the mirror vertex position
利用激光跟踪仪对于拟合非球面顶点到干涉仪会聚点的距离L进行了18 次重复测量,单次测量数据与测量平均值的偏差见图12。按式(16)计算长焦距离18 次测量的标准偏差σ2。

图12 长焦距离重复性实验结果Fig.12 Long-focus distance repeatability test results
将长焦距离18 次测量的平均值4379.776mm 及图12 中每次测量值与平均值的偏差带入式(16),得到长焦距离测量的标准偏差σ2=0.011mm。
取扩展因子为3,此时置信概率为99.73%,拟合非球面顶点到干涉仪会聚点的距离L的测量误差u2为3σ2=0.033mm。
考虑到u1、u2非相关,长焦距离L3的测量误差ΔL3按式(17)进行计算。

将u1=0.01mm 和u2=0.033mm 代入式(17)得,ΔL3=0.035mm。
将ΔL3=0.035mm 代入检测光学系统,计算长焦距离L3测量误差对待测非球面几何参数的影响,计算结果见表5。

表5 长焦距离测量误差的对几何参数的影响Tab.5 Influence of long focus distance measurement errors on geometric parameters
4.4 几何参数综合测试误差ε
按式(15)分别计算顶点曲率半径和的二次非球面系数的综合测试误差εΔR0和εΔK。将表2、表3、表5 中ε1、ε2、ε3的分析结果代入式(15),得到:

通过以上分析得到,对于本文的测试实验,用激光跟踪仪测量待测非球面镜顶点曲率半径的测试误差为±0.051mm、二次非球面系数的测试误差为±0.00011。
将本文表1 中顶点曲率半径和二次非球面系数测试结果与同一块待测非球面镜用测量杆测试的结果进行比对,测试所用的offner 补偿器为同一套。比对结果见表6。两种方法顶点曲率半径测量值相差0.083mm,二次非球面系数测量值相差0.000098。

表6 两种方法测量几何参数的实验结果比对Tab.6 Comparison of experimental results of two methods measuring geometric parameters
5 结束语
本文在offner 补偿器非球面面形测试光路中,对利用激光跟踪仪测量大口径非球面反射镜顶点曲率半径和二次非球面系数的方法进行了研究,确定了包含所需测试参量的测量模型,给出了激光跟踪仪测量轴对称非球面反射镜顶点坐标的拟合算法,并对一块顶点曲率半径4m 量级的非球面反射镜进行了几何参数测试实验,给出了实验结果及测试误差分析。实验结果表明,利用激光跟踪仪及本文的非球面顶点拟合算法,所测的待测非球面顶点至待测镜前端面的矢高与三坐标测试的结果仅相差0.01mm;误差分析表明,对于143mm 的短焦距离和4380mm 的长焦距离,激光跟踪仪的测试误差分别为±0.01mm 和±0.035mm;通过分析补偿器参数误差、短焦距离及长焦距离测试误差对非球面几何参数测试误差的综合影响,得出本文所测非球面镜顶点曲率半径的测试误差为±0.051mm,二次非球面系数的测试误差为±0.00011。通过测试实验可以看出,利用激光跟踪仪靶球与干涉仪自准直测量,可以准确测出球面波会聚点的坐标,减少了测杆法对测试人员刀口阴影判定经验的依赖;由于激光跟踪仪在长距离测试精度上具有明显优势,利用激光跟踪仪测量长曲率半径非球面的几何参数具有工程上容易实现、可以提高测试精度等优点。
